23.11.7 (화) 34일차
영상 화질 개선과 복원
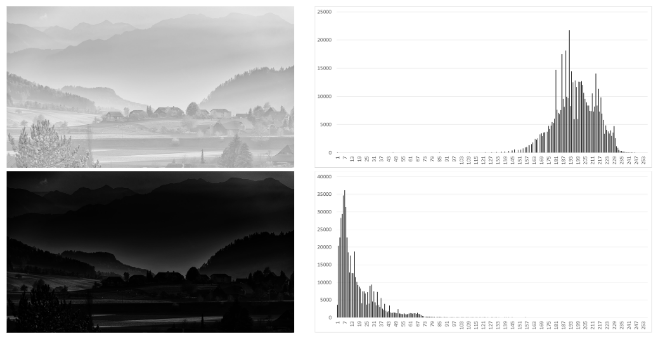
영상 복원이 어려울 때?
히스토그램이 한 군데에 포화되어 있을 때, 어떤 기준으로 밸런스를 잡아주거나 낮출 근거가 없어지기 때문에 복원이 어렵다.
추정 가능한 variation이 전혀 없어서 알 수 없음 ,,
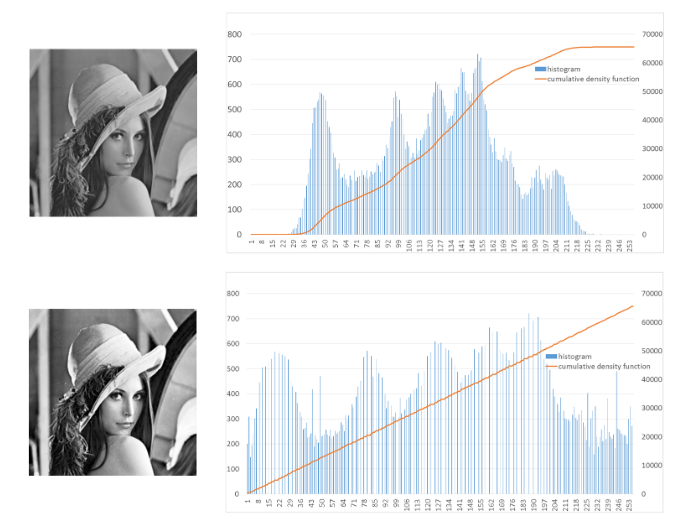
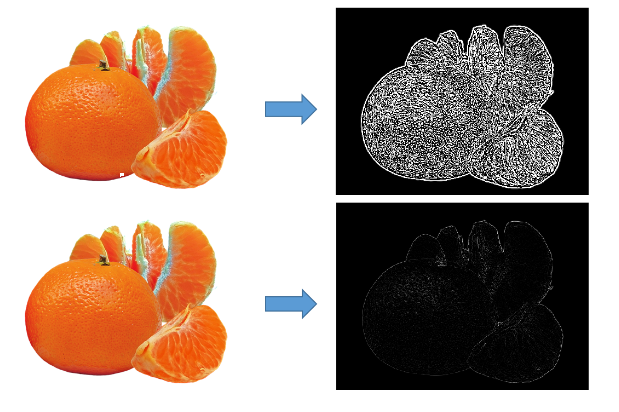
히스토그램 평활화
diff 확인
// ISP_HistoEq.cpp
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../thirdparty/opencv_480/samples/data/lena.jpg";
cv::Mat src = cv::imread(fileName, cv::ImreadModes::IMREAD_ANYCOLOR);
uchar* pData = src.data; // data array
int length = src.total(); // data length
int channels = src.channels();
Mat gray_cv = Mat(src.rows, src.cols, CV_8UC1);
Mat gray = Mat(src.rows, src.cols, CV_8UC1);
cvtColor(src, gray_cv, ColorConversionCodes::COLOR_BGR2GRAY);
ISP _isp;
_isp.Convert_BGR2GRAY(src.data, src.cols, src.rows, gray.data);
Mat diff = gray_cv - gray;
return 1;
}히스토그램 평활화 결과
// IST_HistoEq.cpp
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../thirdparty/opencv_480/samples/data/lena.jpg";
cv::Mat src = cv::imread(fileName, cv::ImreadModes::IMREAD_ANYCOLOR);
uchar* pData = src.data; // data array
int length = src.total(); // data length
int channels = src.channels();
Mat gray = Mat(src.rows, src.cols, CV_8UC1);
ISP _isp;
_isp.Convert_BGR2GRAY(src.data, src.cols, src.rows, gray.data);
const int histoSz = 256;
int histo[histoSz] = { 0, };
_isp.Get_Histogram(gray.data, gray.cols, gray.rows, histo, histoSz);
// 확률 밀도 함수
int acc[histoSz] = { 0, };
// acc[0] = histo[0] + histo[1]
acc[0] = histo[0];
for (size_t i = 0; i < histoSz - 1; i++)
{
acc[i] = acc[i - 1] + histo[i];
}
// new Look Up Table ... 영상의 각 화소값들을 새로운 대응값으로 맵핑
int new_Gray[histoSz] = { 0, };
for (size_t i = 0; i < histoSz; i++)
{
new_Gray[i] = static_cast<int>(1.0 * acc[i] * 255 / length);
}
// assign new Gray value using LUT
Mat gray_Eq = Mat(src.rows, src.cols, CV_8UC1);
for (size_t i = 0; i < length; i++)
{
gray_Eq.data[i] = new_Gray[gray.data[i]];
}
return 1;
}// ISP.cpp
#include "ISP.h"
ISP::ISP()
{
cout << "ISP::Ctor" << endl;
}
ISP::~ISP()
{
cout << "ISP::Dtor" << endl;
}
bool ISP::Convert_BGR2GRAY(uchar* pBGR, int cols, int rows, uchar* pGray)
{
if (pBGR == nullptr || pGray == nullptr)
{
return false;
}
for (size_t row = 0; row < rows; row++)
{
for (size_t col = 0; col < cols; col++)
{
int index = row * cols + col;
float val_Y = 0.299 * pBGR[index * 3 + 2] // R
+ 0.587 * pBGR[index * 3 + 1] // G
+ 0.114 * pBGR[index * 3 + 0]; // B
pGray[index] = (uchar)(val_Y + 0.5);
}
}
return true;
}
bool ISP::Get_Histogram(uchar* pGray, int cols, int rows, int* pHisto, int histoSz)
{
if (pGray == nullptr || pHisto == nullptr)
{
return false;
}
for (size_t i = 0; i < cols * rows; i++)
{
if (pGray[i] >= histoSz) continue; // size 256
pHisto[pGray[i]]++;
}
return true;
}
// ISP.h
#pragma once
#include "Common.h"
class ISP
{
public:
ISP();
~ISP();
bool Convert_BGR2GRAY(
uchar* pBGR, // color channel, input
int cols, // cols, input
int rows, // rows, input
uchar* pGray
);
bool Get_Histogram(
uchar* pGray,
int cols,
int rows,
int* pHisto,
int histoSz
);
private:
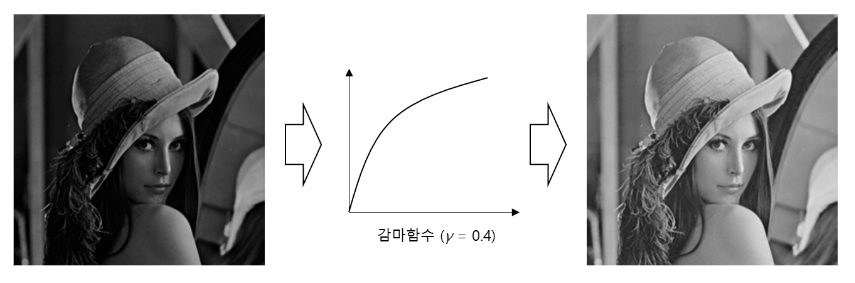
};감마 보정
// GammaCorrection.cpp
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../thirdparty/opencv_480/samples/data/lena.jpg";
cv::Mat src = cv::imread(fileName, cv::ImreadModes::IMREAD_ANYCOLOR);
ISP _isp;
// Gray Input
Mat src_gray;
cvtColor(src, src_gray, COLOR_BGR2GRAY);
// Gamma Correction
// double normalized_value = (double)pixels[i] / 255.0;
// double corrected_value = pow(normalized_value, gamma) * 255.0;
double gamma = 1.2;
Mat src_gamma = Mat(src.size(), CV_8UC1);
for (size_t i = 0; i < src.total(); i++)
{
src_gamma.data[i] = static_cast<uchar>
(pow(src_gray.data[i] / 255.0, gamma) * 255 + 0.5);
}
// Gray Output
return 1;
}선형 필터와 비선형 필터
가우시안 필터
- 이상적 저역 필터
- 공간 영역에서 sinc 형태의 무한 길이의 필터
- 요구사항- 공간 영역 : 필터의 크기 최소화 - 주파수 영역 : 패스 밴드로 에너지 집중
소벨 연산
- 1차 미분치 값 계산 후 이를 임계치와 비교
- 수평과 수직 축으로 미분치 계산
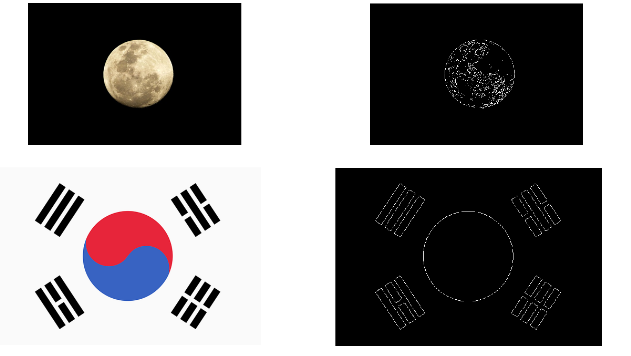
라플라시안 필터
- 2차 미분 값의 zero-crossing을 이용한 경계선 검출
- 임계치 불필요
- 최소 두께의 경계선 검출 가능 - 문제점
- 미세한 경계까지 검출하여 잘못 된 경계선 검출 가능
- 라플라시안 연산자 적용 전, 가우시안 필터를 이용하여 잡음 제거
LoG(Laplacian of Gaussian) 필터
-
가우시안 필터와 라플라시안 필터를 동시에 적용
-
문제점
- 잡음의 형태에 따른 분산값 선택의 어려움
- 경계점 위치가 이동
캐니 에지
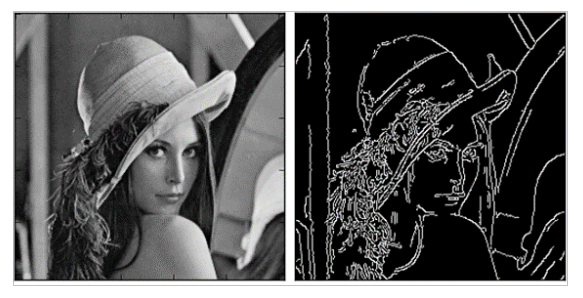
- 가장 우수하고 가장 명세화한 경계선 검출 알고리즘.
- 소벨은 경계선이 두툼하게 나오지만 캐니는 하나의 경계선만 검출
- 경계선이 두툼하면 어디인지 명확하지 않을 때가 있음.
경계선 검출의 목적
- 낮은 에러율
- 경계선의 이동 최소화
=> 가우시안 필터와 함께 사용하면 안정적으로 검출할 수 있다
중간값 검출
노이즈가 튈 때 대표값을 어떤 기준으로 출력할 수 있을까?
보통 대표값을 출력하는 방법은 평균값, 중앙값, 최빈값이 있음.
- 평균값: 값이 튈 때는 평균값을 대표로 쓰기에 무리가 있음
- 최빈값: 노이즈가 최빈값이면 대표해선 안 됨
=> 이러한 이유로 중앙값을 선택하는 것이 가장 좋다
#pragma once
#include "ISP.h"
int main()
{
int datas[] = { 6, 4, 8, 9, 4, 4, 8, 64, 4, 6, 4, 8, 6, 4, 11, 1, 3, 1134, 5, 64, 5, 64 };
// 노이즈가 없는 대표 신호값을 정하시오.
const int length = sizeof(datas) / sizeof(datas[0]);
sort(datas, datas + length);
vector<int> vDatas(datas, datas + length);
sort(vDatas.begin(), vDatas.end());
int major = datas[length / 2];
int major_v = vDatas[length / 2];
return 1;
}Sort 함수
QuickSort
반 잘라서 판단, 왼쪽 반 잘라서 판단, 오른쪽 반 잘라서 판단,,, 계속 반 잘라가면서 판단
부스러기
파이썬은 슬라이스 기능이 잘 되어 있음,,오호라~
추상화도 잘 되어 있음
arr = [0, 1, 2, 3, 4]
for x in arr:
print(x ** 2)** 이런 게 추상화의 꽃,, 정수/실수/문자 모두 가능
class는 무조건 self를 넣어줘야 함 (C++의 this 기능과 흡사)
스탠포드 딥러닝 코스: http://cs231n.stanford.edu/

I mean