HashMap이란?
{key, value} 쌍으로 이루어진 값을 저장하며 탐색, 삭제, 저장을 O(1) 으로 수행하는데 목적을 가진 자료구조
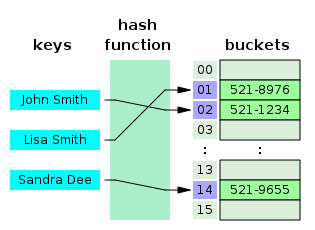
저장 및 조회 방식
hash함수를 사용해서key를 해쉬 값으로 만듦 =bucketbucket에 실제 데이터인{key, value}쌍을 저장- 데이터를 조회할 때
key값을hash함수를 사용해서 해당bucket의 데이터를 반환
시간 복잡도
| Operation | Best Time |
|---|---|
| store | O(1) |
| delete | O(1) |
| search | O(1) |
- Collison이 일어나지 않은 경우 모두
O(1)
Collision ( 충돌 )
서로 다른 key에 대해 hash함수 의 bucket 이 같은 결과가 나와서 충돌이 일어나 발생하는 문제
Collision 대응책
- open addressing
- separete chaining
- 충돌이 덜 일어나게 좋은 해쉬 함수를 사용하기
1. Open addressing
Collision이 발생하면 특정 로직에 따라 table의 비어있는 bucket을 찾아서 데이터를 저장하는 방식
- Linear Proding( 선형 조사법 )
Collision이 발생하면 일정 값 만큼 건너 뛰어 빈bucket에 데이터를 저장 함
( bucket + 1, bucket + 2, bucket+3 … ) - Quadratic Proding( 이차 조사법 )
Collision이 발생하면 제곱수로 건너 뛰어 빈bucket에 데이터를 저장
( bucket + 1^2, bucket + 2^2, bucket+3^2 … )
선형 조사법과 이차조사법의 경우 Collision이 많이 일어 날수록 특정 영역 에 데이터가 몰리는 clustering이 발생함
-> 결국 같은 증가폭으로 탐색을 하기 때문에 충돌이 잦음
( clustering이 발생하면 탐색 시간이 증가하게 됨 )
- Double Hashing
해시함수를 2개를 사용하는 방식
하나는 buket을 얻는데 사용하고 하나는 충돌이 발생할 경우 이동폭을 얻기 위해 사용 함
선형 조사법, 이차 조사법 보다 균일하게 분포시킬 수 있음
(hash1(key) + i * hash2(key)) % TABLE_SIZE ( 충돌 발생 시 i 를 증가시켜서 탐색 i 는 1부터 시작 )
- 자주 사용하는 hash1
hash1(key) = key % TABLE_SIZE - 자주 사용하는 hash2 ( prime < TABLE_SIZE )
hash2(key) = prime - ( key % prime )
Dobule Hasing 예제
Table Size = 13이고 Prime은 7일 때
Hash1(key) = key % 13
Hash2(key) = 7 - (key%7) key가 36, 10일 경우
Hash1(36) = 10, Hash1(10) = 10 ( 값이 10으로 동일 충돌 발생 !)
충돌해결하기
1. Hash2(10) = 7 - (10 % 7) = 4
2. Double Hash = (Hash1(10) + 1 * Hash2(10)) % 13 = (10 + 1 * 4) % 13 = 1
1이 나왔지만 Hash1(27)과 Collision이 발생 → i 값을 증가시켜서 충돌 확인
Dobule Hash = (Hash1(10) + 2 * Hash2(10)) % 13 = (10 + 2 * 4) % 13 = 5
5에는 충돌이 없으므로 해결 !2. Separate Chaining
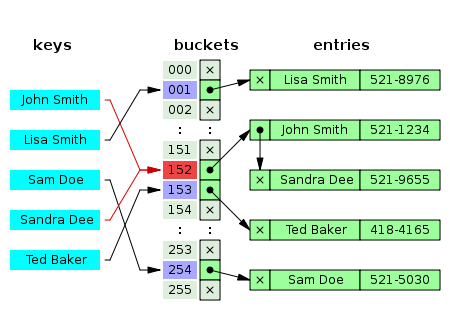
Linked List 혹은 BST를 이용해서 Collison을 해결하는 방식. 충돌이 일어나면 Linked List에 노드를 추가하여 데이터를 연속적이게 저장 함
삽입 삭제 시 bukcet의 키 값이 일치하면 바로 처리하면 되지만 일치하지 않을 경우 Linked List를 순회해야 함
Linked List가 너무 길어져서 느려지는 것을 개선하기 위해 BST에 저장하여 Worst Time을 O(log n)으로 줄이는 방식도 있음
시간 복잡도
| Operation | Best Time | Worst Time (Linked List) | Worst Time (BST) |
|---|---|---|---|
| store | O(1) | O(1) | O(log n) |
| delete | O(1) | O(n) | O(log n) |
| search | O(1) | O(n) | O(log n) |
- Linked List의 장점 : 저장할 때 맨 앞에 저장하고 포인터를 이동하면 되므로
O(1)만에 수행 가능 - BST의 장점 : 정렬된 트리이기 때문에 저장, 탐색, 삭제를
O(log n)에 수행 가능
Separate Chaining( Linked List )
struct Node{
int key, val;
Node* next;
Node(int k, int v, Node* node){
key = k;
val = v;
next = node;
}
};
class MyHashMap {
public:
static const int size = 19997;
static const int mul = 12582917;
Node* map[size] = {};
int hash(int key){
return (int)((long long)key * mul % size);
}
void put(int key, int value) {
remove(key);
int idx = hash(key);
Node* node = new Node(key, value, map[idx]);
map[idx] = node;
}
int get(int key) {
int idx = hash(key);
Node* node = map[idx];
while(node != nullptr){
if(node->key == key){
return node->val;
}
node = node->next;
}
return -1;
}
void remove(int key) {
int idx = hash(key);
Node* node = map[idx];
if(node == nullptr) return;
if(node->key == key){
map[idx] = node->next;
delete node;
}
else{
while(node->next != nullptr){
if(node->next->key == key){
Node* tmp = node->next;
node->next = tmp->next;
delete tmp;
return;
}
node = node->next;
}
}
}
};
/**
* Your MyHashMap object will be instantiated and called as such:
* MyHashMap* obj = new MyHashMap();
* obj->put(key,value);
* int param_2 = obj->get(key);
* obj->remove(key);
*/Separate Chaining (BST)
일반 BST를 구현한 코드로 균형이 깨질 경우 worst time이 O(n)입니다.
추후에 균형을 맞출 수 있는 AVL트리나 Red Black트리를 알아보고 정리하겠습니다.
struct Node
{
int key, value;
Node *left, *right;
Node(int k, int v)
{
key = k;
value = v;
left = nullptr;
right = nullptr;
}
};
class BST
{
public:
static Node *insertBST(Node *node, Node *newNode)
{
if (node == nullptr)
{
return newNode;
}
if (node->key < newNode->key)
{
node->right = insertBST(node->right, newNode);
}
else if (node->key > newNode->key)
{
node->left = insertBST(node->left, newNode);
}
return node;
}
static int searchBST(Node *node, int key)
{
if (node == nullptr)
return -1;
if (node->key < key)
{
searchBST(node->right, key);
}
else if (node->key > key)
{
searchBST(node->left, key);
}
else
{
return node->value;
}
return -1;
}
static Node *deleteBST(Node *node, int key)
{
if (node == nullptr)
{
return node;
}
if (node->key < key)
{
node->right = deleteBST(node->right, key);
}
else if (node->key > key)
{
node->left = deleteBST(node->left, key);
}
else
{
// No child
if (node->left == nullptr && node->right == nullptr)
{
delete node;
return nullptr;
}
// One Child
if (node->left == nullptr || node->right == nullptr)
{
Node *tmp = node->left ? node->left : node->right;
delete node;
return tmp;
}
// Two Child
if (node->left && node->right)
{
Node *tmp = node->left;
while (tmp->right)
{
tmp = tmp->right;
}
node->key = tmp->key;
node->value = tmp->value;
node->left = deleteBST(node->left, key);
}
}
return node;
}
};
class HashMap
{
static const int mul = 12582917;
static const int size = 19997;
Node *map[size] = {};
public:
int hash(int key)
{
return (int)((long long)key * mul % size);
}
void insert(int key, int value)
{
remove(key);
int bucket = hash(key);
if (map[bucket] == nullptr)
{
map[bucket] = new Node(key, value);
}
else
{
Node *newNode = new Node(key, value);
map[bucket] = BST::insertBST(map[bucket], newNode);
}
}
int search(int key)
{
int bucket = hash(key);
return BST::searchBST(map[bucket], key);
}
void remove(int key)
{
int bucket = hash(key);
BST::deleteBST(map[bucket], key);
}
};
int main()
{
HashMap *map = new HashMap();
map->insert(1, 2);
map->insert(2, 3);
map->insert(3, 4);
map->insert(4, 6);
map->insert(5, 11);
map->insert(6, 7);
map->insert(7, 8);
cout << map->search(4) << endl;
cout << map->search(5) << endl;
cout << map->search(6) << endl;
cout << map->search(7) << endl;
cout << endl;
map->remove(4);
cout << map->search(4) << endl;
cout << map->search(5) << endl;
cout << map->search(6) << endl;
cout << map->search(7) << endl;
return 0;
}Application
- 빠른
O(1)시간만에 데이터를 삽입, 삭제, 조회가 필요할 경우 사용