ubuntu20.04에 맞게 ros noetic 설치
참고한 공식 사이트는 아래와 같다.
https://wiki.ros.org/noetic/Installation/Ubuntu
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt install curlcurl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -

- 명령어 마지막에 -y를 입력해서 중간에 y누르는 부분이 생략될 것임
sudo apt updatesudo apt install ros-noetic-desktop-full -y
source /opt/ros/noetic/setup.bashecho "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc

- 명령어 마지막에 -y를 입력해서 중간에 y누르는 부분이 생략될 것임
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential -y
sudo apt install python3-rosdepsudo rosdep initrosdep update
이제 설치가 잘 되었는지 확인해보자
-
wsl 재접속
-
터미널창에 아래와 같이 입력
roscore
- 간단한 turtlesim 노드를 실행시켜보자
rosrun turtlesim turtlesim_node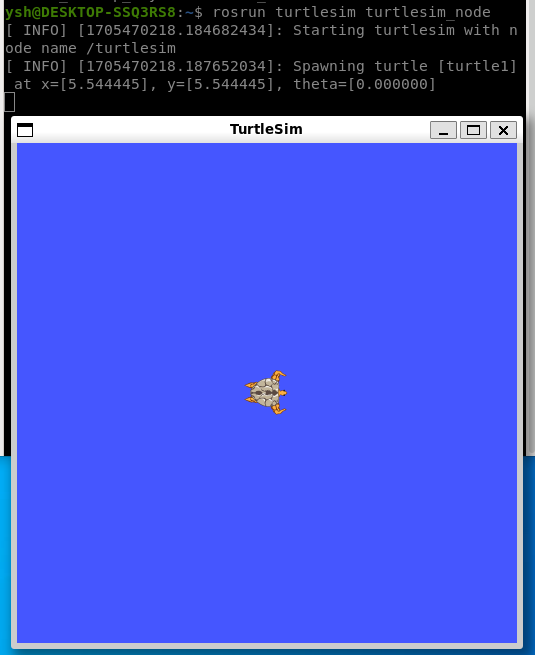
이렇게 잘 뜨면 ros noetic 설치가 잘 된 것이다!

화이팅