1. Velocity Obstacle(VO)
정의
- 위 오른쪽 그림의 회색 영역이
 영역이고, 그 정의는 아래와 같습니다.
영역이고, 그 정의는 아래와 같습니다. - 정의
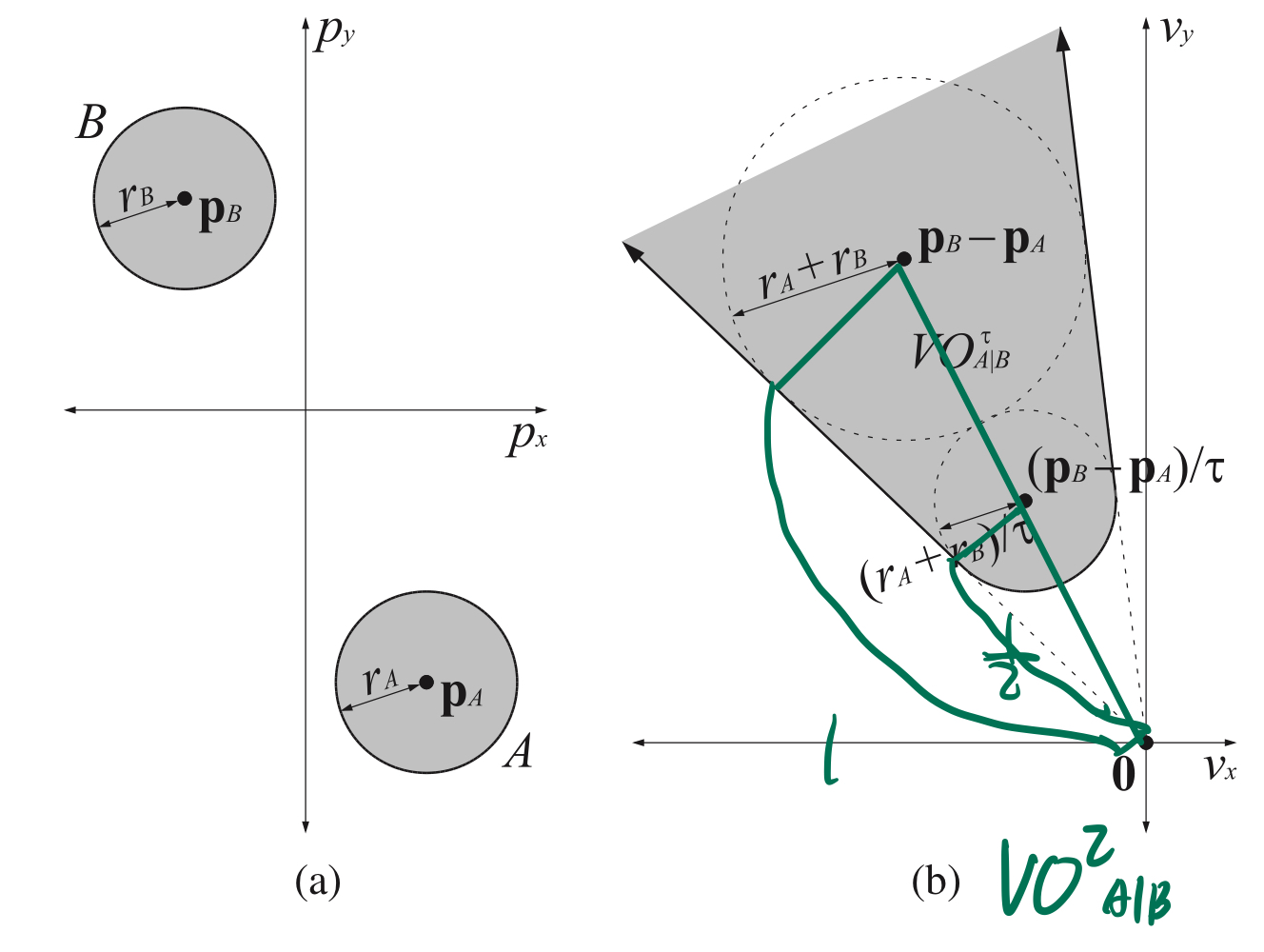
- 전제: A와 B가 등속도로 움직인다고 가정했을 때,
시간 t 내에, A입장에서, B로 인해 생성된 velocity obstaclet초내에 충돌하는 상대속도 V_a-V_b의 집합

- 다른 표현 방식으로는
- 무한대 시간 내에 충돌하는 V_a 집합
- 얘는 시간 개념이 빠져있고, 상대속도 집합이 아니라, V_a의 집합입니다.
특성

- 회피 시, Oscillation이 발생할 수 있음.
2. Reciprocal Velocity Obstacle(RVO)
개념
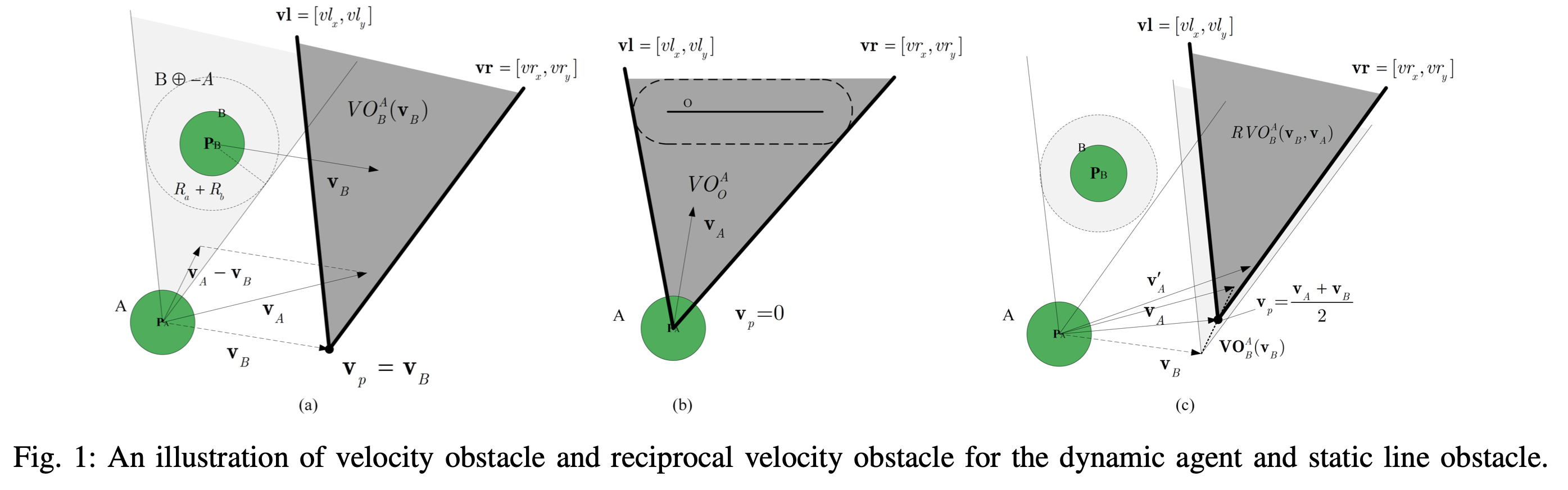
- 위 그림의 (c)가 RVO를 나타냅니다.
- 영역에서,
- V_b만큼 평행이동하는게 VO
- (V_a + V_b)/2 만큼 평행이동하는게 RVO
특성
- VO 개념을 바탕으로, 상호 충돌 회피(Reciprocal Collision Avoidance, RCA)를 달성하기 위해 RVO가 개발되었습니다.
- Oscillation 문제가 해결됨
- 회피를 상호 책임의 문제로 보았다.
- 여기서 각 로봇은 유사한 항해 정책을 가지고 서로를 피하기 위해 동등한 노력을 사용합니다.
- RVO는 선형 프로그래밍을 통해 로봇이 최적의 속도를 찾도록 돕기 위해,
속도 공간에서 여러 반 평면 제약을 사용하는 최적의 상호 충돌 회피(Optimal Reciprocal Collision Avoidance, ORCA)로 더 발전했습니다.

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.