human avoidance
1.Reinforcement Learned Distributed Multi-Robot Navigation with Reciprocal Velocity Obstacle Shaped Rewards
2022, 37회 인용https://www.researchgate.net/profile/Zeqing-Zhang-4/publication/359390555_Reinforcement_Learned_Distributed_Multi-Robot_Navigation_wi
2.Distributed Multi-agent Navigation Based on Reciprocal Collision Avoidance and Locally Confined Multi-agent Path Finding
다중 에이전트 내비게이션에서 충돌 방지는 핵심 문제입니다. 분산된 설정에서, 에이전트들이 제한된 통신 및 감지 능력을 가질 때, 충돌은 일반적으로 반응적 방식으로 피해지며, 이는 지역적 관측/통신에 의존합니다. 주요 충돌 방지 기술들, 예를 들어 ORCA는 계산적으로
3. PUSH AND ROTATE

"PUSH AND ROTATE" 알고리즘은 다중 에이전트 경로 찾기(Multi-Agent Path Finding, MAPF) 문제를 해결하기 위해 고안된 특별한 알고리즘입니다. 간단하고 효율적인 접근법: 이 알고리즘은 다중 에이전트 시스템에서 상대적으로 간단한 상황에
4.CONFLICT BASED SEARCH (ECBS)
"Conflict-Based Search" (CBS)와 그 변형인 "Enhanced Conflict-Based Search" (ECBS)는 다중 에이전트 경로 찾기(Multi-Agent Path Finding, MAPF) 문제를 해결하기 위한 알고리즘입니다. 분할 정복
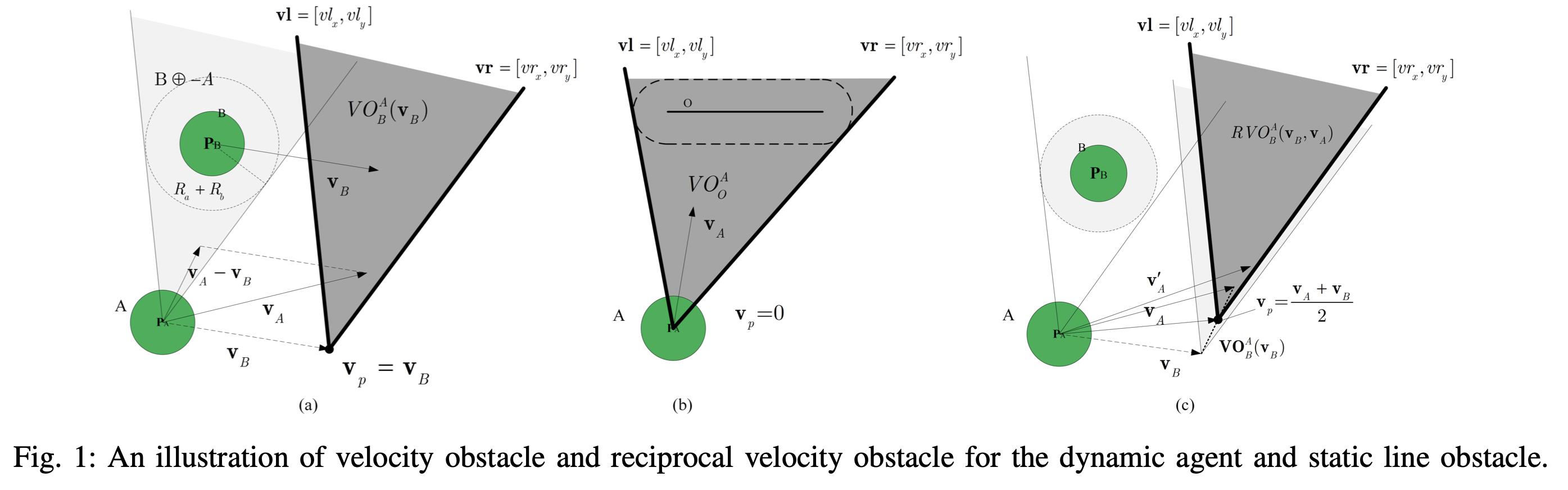
5.Velocity Obstacle(VO) / Reciprocal Velocity Obstacle(RVO)

위 오른쪽 그림의 회색 영역이 영역이고, 그 정의는 아래와 같습니다.정의전제: A와 B가 등속도로 움직인다고 가정했을 때,시간 t 내에, A입장에서, B로 인해 생성된 velocity obstaclet초내에 충돌하는 상대속도 V_a-V_b의 집합
6.Optimal Reciprocal Collision Avoidance (ORCA)

https://velog.io/@jk01019/Velocity-ObstacleVOB의 속도가 어떻게 되었든, (t초내에) 절대 충돌하지 않을 수 있는 A의 속도 집합t초내에 충돌하는 상대속도 V_a-V_b의 집합V-b: 가능한 모든 b의 속도 집합
7.DRL-VO: Learning to Navigate Through Crowded Dynamic Scenes Using Velocity Obstacles
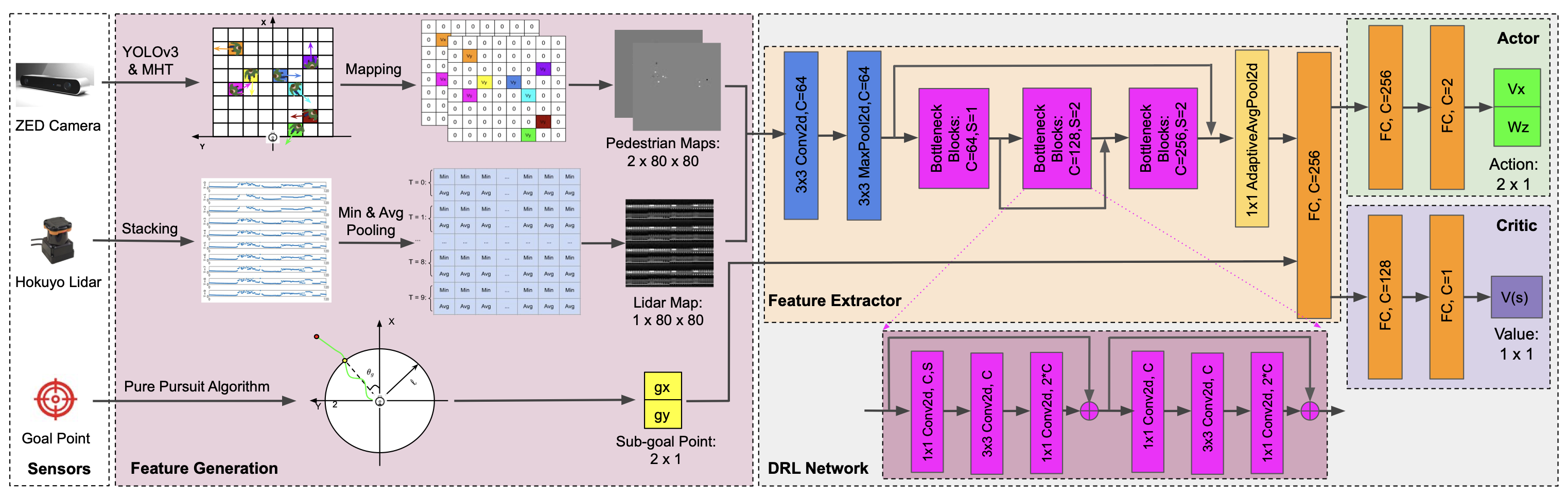
2023, 9회 인용 https://arxiv.org/pdf/2301.06512.pdf