
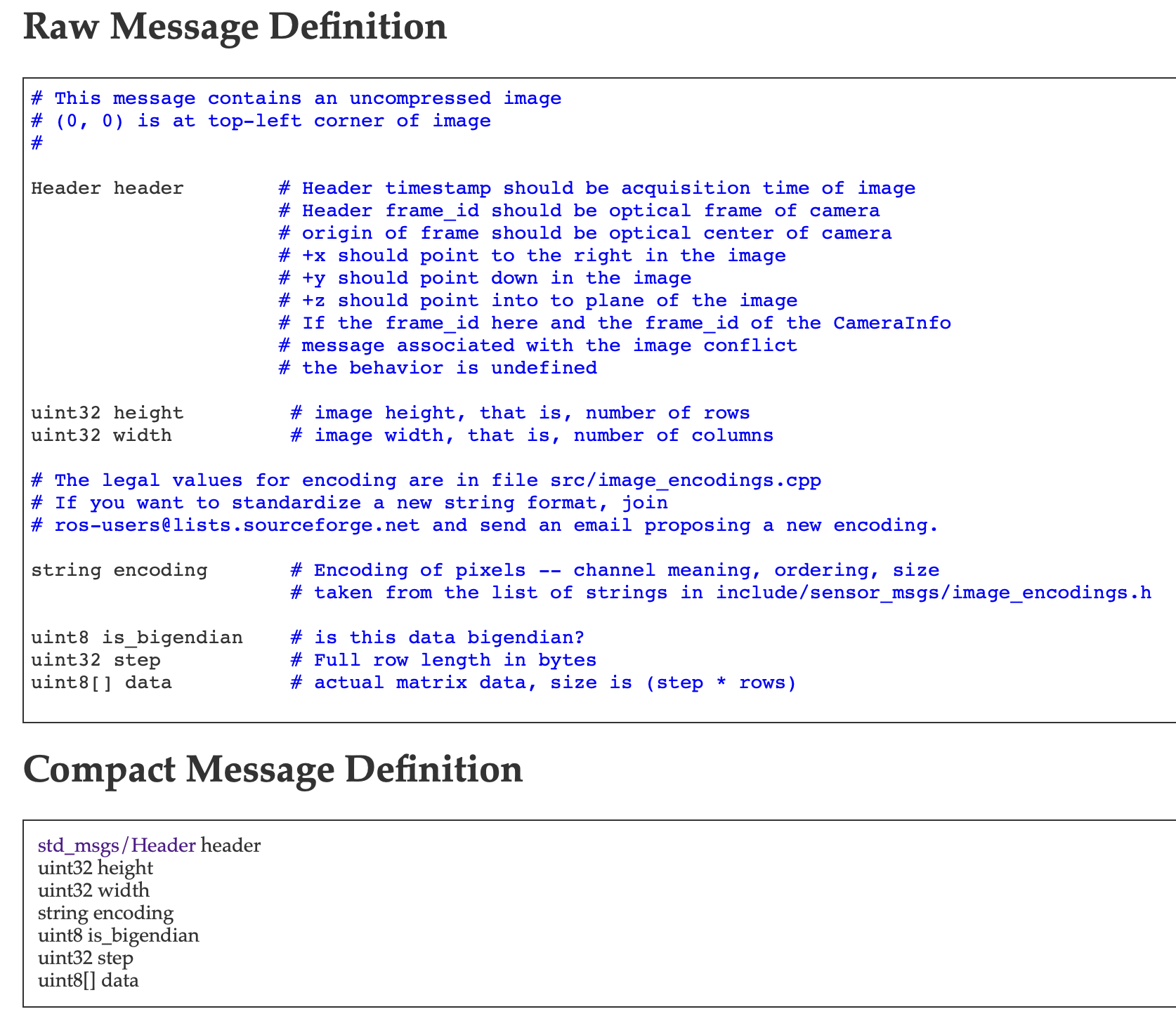
sensor_msgs/Image 메시지는 ROS에서 이미지 데이터를 전달하기 위한 표준 메시지 형식입니다. 이 메시지는 압축되지 않은 이미지 데이터를 포함하며, 이미지 처리나 컴퓨터 비전 작업에 사용됩니다. 각 필드는 이미지와 관련된 다양한 정보를 제공합니다.
주요 필드 설명:
-
Header header: 이미지의 헤더 정보입니다. 이 헤더에는 이미지가 취득된 시간(timestamp)과 카메라의 광학 중심을 기준으로 한 프레임 ID(frame_id)가 포함됩니다. 프레임 ID는 이미지가 속한 좌표계를 식별하는 데 사용됩니다. 이 헤더 정보를 통해 이미지의 시간적 및 공간적 컨텍스트를 알 수 있습니다. -
uint32 height와uint32 width: 이미지의 높이와 너비를 나타냅니다. 높이는 이미지의 행 수(세로 방향 픽셀 수), 너비는 열 수(가로 방향 픽셀 수)를 의미합니다. -
string encoding: 이미지 픽셀의 인코딩 방식을 나타냅니다. 이는 픽셀의 채널 의미, 순서, 크기 등을 정의합니다. 예를 들어, 'rgb8'은 RGB 색상 공간에서 각 채널이 8비트인 이미지를 의미합니다. -
uint8 is_bigendian: 이 데이터가 빅엔디안(bigendian) 방식으로 인코딩되었는지를 나타냅니다. 1이면 빅엔디안, 0이면 리틀엔디안(little endian)입니다. -
uint32 step: 이미지의 한 행을 구성하는 데 필요한 바이트 수입니다. 이는 이미지 한 행의 실제 길이를 바이트 단위로 나타냅니다. -
uint8[] data: 실제 이미지 데이터입니다. 이 배열의 크기는(step * rows)입니다.data필드는 이미지 픽셀 값을 담고 있으며,encoding필드에 지정된 형식에 따라 해석됩니다.
이미지 좌표계:
- 이미지의 원점
(0, 0)은 이미지의 좌측 상단 모서리에 위치합니다. +x축은 이미지에서 오른쪽 방향을 가리킵니다.+y축은 이미지에서 아래쪽 방향을 가리킵니다.+z축은 이미지 평면을 향해 바깥쪽으로 나타냅니다.
- 빅엔디안, 리틀 엔디안? : https://velog.io/@jk01019/Big-endian-Little-endian
