ros2
1.rclpy(ROS Client Library for Python)

rclpy는 ROS 2 (Robot Operating System 2)에서 Python 클라이언트 라이브러리ROS 2는 로봇 프로그래밍을 위한 플랫폼으로, rclpy는 ROS 2의 기능과 통신을 Python 프로그래밍 언어로 사용할 수 있게 해주는 라이브러리rclpy를
2.ROS_DOMAIN_ID
네트워크 상에서 ROS 노드들이 서로를 찾고 통신하는 데 사용되는 도메인 ID를 설정
3.Multi-tenancy
"멀티-테넌시(Multi-tenancy)"는 하나의 소프트웨어 인스턴스, 시스템, 서버 또는 기타 컴퓨팅 자원이 여러 사용자 그룹(테넌트)에 의해 공유되는 아키텍처나 모델을 의미합니다. 이 개념은 주로 클라우드 컴퓨팅 및 서비스 지향 아키텍처에서 찾아볼 수 있으며, 로
4.[ros2] callback
특정 이벤트나 조건이 발생했을 때 자동으로 호출되도록 예약된 함수 특히 이벤트 기반, 비동기 프로그래밍에서 자주 사용됩니다. 예를 들어, Python의 비동기 I/O 작업, 또는 ROS 프로그래밍에서의 메시지 처리 등에서 콜백을 사용콜백의 주요 특징과 사용 방법은 다음
5.[ros2] 이벤트 루프 (event loop)
이벤트 루프는 프로그램이나 어플리케이션에서 발생하는 다양한 이벤트(예: 사용자 입력, 파일 I/O, 네트워크 통신 등)를 처리하는 방식을 관리이벤트 루프는 사용자 인터페이스, 네트워크 서버, 비동기 프로그래밍 등 다양한 분야에서 프로그램의 반응성과 효율성을 높이는 데
6.[rclpy] SingleThreadedExecutor
SingleThreadedExecutor는 rclpy에서 제공하는 클래스콜백: https://velog.io/@jk01019/ros2-callback특정 이벤트나 조건이 발생했을 때 자동으로 호출되도록 예약된 함수이 클래스는 ROS 2 노드의 콜백을 관리하고
7.[ros2] Node
ROS 네트워크의 기본적인 실행 단위로봇 시스템 내에서 개별적인 프로세스 또는 특정한 작업을 수행센서 데이터 처리, 상태 모니터링, 움직임 계획, 사용자 인터페이스 제공 등 다양한 작업을 수행하기 위해 노드를 사용 독립적인 실행 단위각 노드는 독립적으로 실행되는 프로세
8.[ros2] topic pub / sub
메시지 타입 (msg_type):이 인자는 퍼블리셔가 발행할 메시지의 타입을 정의예를 들어, std_msgs.msg.String은 문자열 메시지를, sensor_msgs.msg.Image는 이미지 데이터를 나타냅니다.메시지 타입은 ROS 2에서 사전에 정의되어 있거나
9.[ros2] from rclpy.utilities import get_default_context
from rclpy.utilities import get_default_context는 rclpy 모듈의 utilities 패키지에서 get_default_context 함수를 가져옵니다. get_default_context 함수는 ROS 2 애플리케이션의 기본 실행
10.[ros2] create_service, create_client
ROS 2 (Robot Operating System 버전 2)에서 서비스(Service)는 노드 간의 요청-응답(Request-Response) 통신 패턴을 구현하는 방법입니다. 서비스는 일반적으로 하나의 노드에서 특정 작업을 수행하고, 그 결과를 요청한 노드에 반환
11._rclpy ( rclpy의 내부 C 확장 모듈)
이 함수는 WaitSet 객체를 초기화하는 데 사용from rclpy.executors import \_WaitSet : https://velog.io/@jk01019/rclpyWaitSet은 ROS 2의 다양한 엔티티(구독, 타이머, 서비스, 클라이언트 등)
12._rclpy ( rclpy의 내부 C 확장 모듈)
이 함수는 WaitSet 객체를 초기화하는 데 사용from rclpy.executors import \_WaitSet : https://velog.io/@jk01019/rclpyWaitSet은 ROS 2의 다양한 엔티티(구독, 타이머, 서비스, 클라이언트 등)
13.[rclpy] QoSProfile
rclpy.qos.QoSProfile은 ROS 2에서 Quality of Service (QoS) 설정을 관리하는 데 사용됩니다. QoS 설정은 ROS 2 통신(메시지 발행 및 구독)의 신뢰성, 지속성, 전달 속도 등을 제어하는 중요한 매개변수들을 정의합니다. 이를 통
14.[rclpy] sensor_msgs/Image.msg
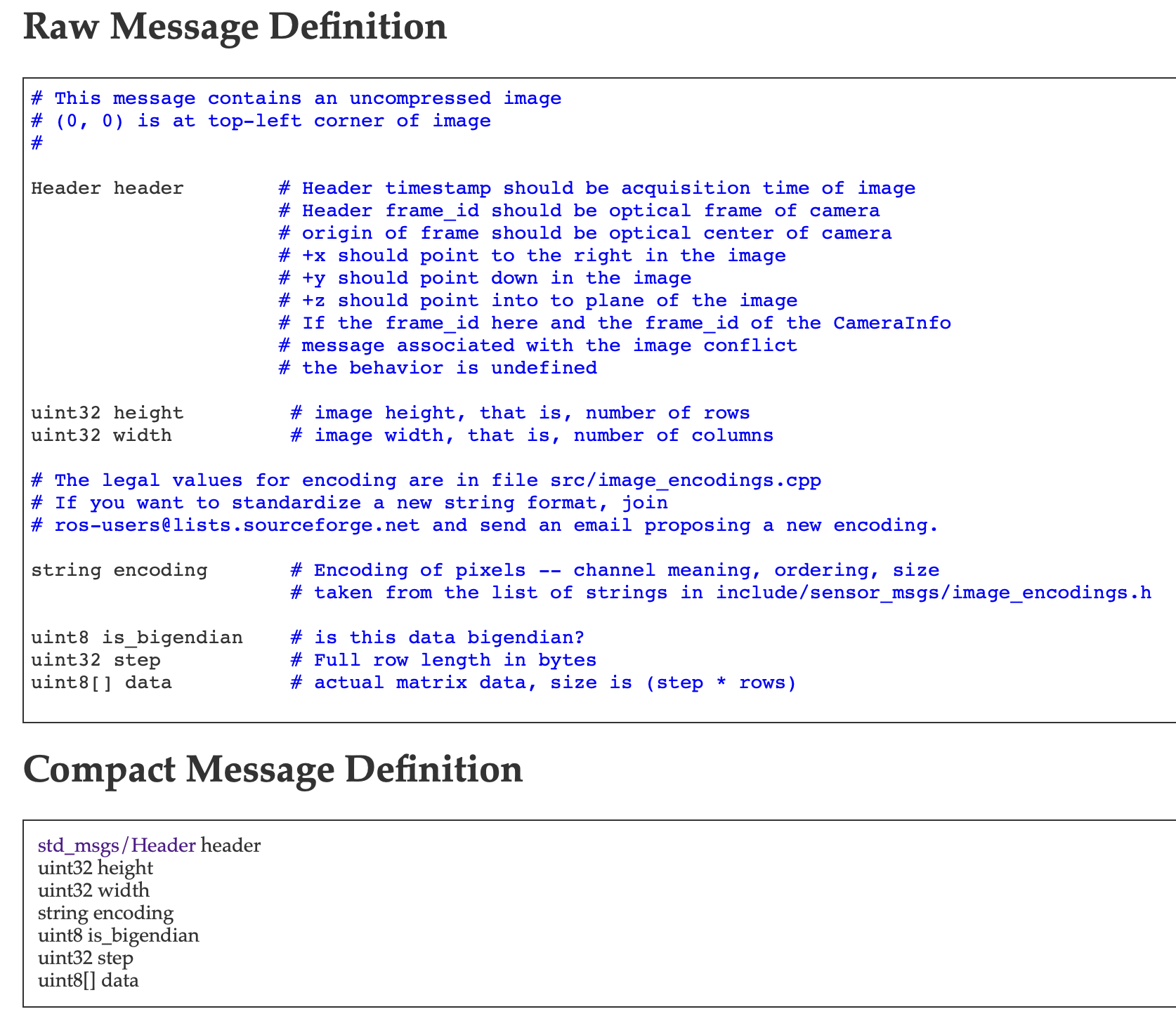
sensor_msgs/Image 메시지는 ROS에서 이미지 데이터를 전달하기 위한 표준 메시지 형식입니다. 이 메시지는 압축되지 않은 이미지 데이터를 포함하며, 이미지 처리나 컴퓨터 비전 작업에 사용됩니다. 각 필드는 이미지와 관련된 다양한 정보를 제공합니다.Heade
15.[ros2] 통신원리
ROS 2에서 만든 publisher와 subscriber 노드가 하나의 단일 프로세스 내에서 동작하는 경우에도, ROS 2의 통신 메커니즘은 동일하게 적용이 경우, 두 노드(발행자와 구독자)는 동일한 프로세스 내에서 실행되지만, ROS 2의 내부 통신 인프라를 통해
16.[ros2] self.get_logger() 사용법
self.get_logger() 메서드는 ROS 2에서 Python을 사용하여 노드를 개발할 때 로깅을 위해 사용이 메서드는 노드의 로거 인스턴스를 반환이를 통해 개발자는 다양한 로그 레벨에서 메시지를 출력할 수 있음get_logger()로 반환된 로거 객체는 다음과
17.[ros2] CompressedImage VS Image
ROS 2에서 rclpy를 이용해 depth image와 RGB image를 publish하는 노드를 작성하는 것은 여러 단계를 포함합니다. 먼저, ROS 2 패키지를 생성하고, 그 안에 노드를 작성해야 합니다. 이 예시에서는 sensor_msgs/msg/Image 메
18.[rclpy] Single(Multi)ThreadedExecutor VS Spin
rclpy는 ROS 2에서 Python 클라이언트 라이브러리로 사용됩니다. ROS 2는 로봇 소프트웨어 시스템을 위한 통신 및 미들웨어 솔루션을 제공합니다. rclpy.spin과 SingleThreadedExecutor 및 MultiThreadedExecutor는 RO
19.[rclpy] point_cloud
sensor_msgs/PointCloud2.msg는 ROS 메시지 타입으로, N차원 포인트 클라우드 데이터를 ㅍ저장하고 전송하는 데 사용이 메시지 타입은 추가 정보(예: 법선, 강도 등)를 포함할 수 있는 N차원 포인트의 컬렉션을 포함포인트 데이터는 이진 블롭(bina
20.[ros2] PointField
sensor_msgs/PointField 메시지는 PointCloud2 메시지 포맷에서 한 포인트의 엔트리를 기술하는 데 사용됩니다. 이 메시지는 PointCloud2 데이터 내의 각 필드(예: x, y, z 좌표, 강도 등)가 어떻게 구성되어 있는지 설명하는 메타데이
21.[ros2] depth array를 pub/sub 할 때, uint16 VS float32?
ROS 커뮤니티 내에서 depth array를 float32와 uint16 중 어느 것이 더 보편적으로 사용되는지는 명확히 정의할 수 없습니다.사용하는 센서, 특정 응용 프로그램의 요구 사항, 그리고 데이터 처리 방법에 따라 달라질 수 있습니다. 각각의 방식은 특정 상
22.[ros2] custom msg type 만들기!
ROS 2에서 사용자 정의 메시지 타입을 생성하여 bounding box 데이터를 publish하는 과정은 몇 가지 단계를 포함합니다. 여기서는 (k, 4) 형태의 bounding box 데이터 (x, y, w, h)를 publish하기 위해 사용자 정의 메시지 타입을
23.rclpy 빌드 / 설치 /배포
ros2 pkg create 명령어는 새로운 패키지를 생성하는 데 사용 (ROS 2 개발 환경에서 패키지가 올바르게 인식되고 사용될 수 있도록)패키지의 기본 구조를 설정필요한 메타데이터 파일들을 생성터미널을 열고 다음 명령어를 실행하세요:<your_package_
24.ros2 create, colcon build 항상 거쳐야 하니?
ROS2에서 publisher와 subscriber를 만들고 사용하기 위해 반드시 ros2 pkg create 및 colcon build 과정을 거쳐야 하는 것은 아닙니다. 이러한 과정은 패키지를 구성하고, 빌드 시스템과 통합하여 다양한 ROS2 도구와 호환되도록 만들
25.[ros2] package.xml
패키지의 "신분증"패키지의 메타데이터를 정의하는 파일패키지 이름, 버전, 라이선스, 의존성 및 기타 정보가 포함rclpy, sensor_msgs, geometry_msgs에 대한 의존성이 명시되어 있습니다.ament 같은 ROS2 빌드 도구는, package.xml에서
26.[ros2] setup.cfg
설명패키지의 구성을 도와주는 설정 파일setuptools를 사용하여 패키지를 배포할 준비를 할 때 필요한 정보를 담고 있음주로 패키지 버전, 설명 등이 여기에 정의version = attr: example_pkg.version는 패키지의 init.py 파일에서 버전 정
27.[ros2] setup.py
사용법colcon은 Python 패키지를 빌드할 때 setup.py 파일을 사용하여 패키지를 설치이 과정에서 setup.py에 정의된 설정이 패키지의 빌드 및 설치 방식을 결정Python 기반의 ROS2 패키지에서 ament_python 빌드 시스템을 사용하는 경우,
28.[ros2] setup.py와 setup.cfg
setup.py와 setup.cfg는 Python 패키지를 정의하고 배포하기 위한 설정 파일사용 방식과 목적에 있어 몇 가지 중요한 차이점아래에서 이 두 파일의 주요 차이점을 명료하게 설명하겠습니다.접근 방식: setup.py는 프로그래밍 방식으로 패키지 설정을 제공하
29.[ros2] CMakeLists.txt
ROS 2에서 CMakeLists.txt 파일은 패키지의 빌드 규칙을 정의하는 역할ROS 2는 CMake 빌드 시스템을 사용하여 패키지를 빌드하며, CMakeLists.txt는 CMake가 각 패키지를 어떻게 컴파일하고 링크할지 지시하는 지침을 포함CMakeLists.
30.[rclpy] PointCloud2 Publisher와 Subscriber 만들기!
struct.pack 함수는 Python 값들을 바이트 객체로 패킹하는 데 사용패킹?하나 이상의 데이터 값을 바이트 또는 바이너리 형태로 변환하는 과정데이터를 저장하거나 전송하기 위해 특정 형식으로 조직화하는 것을 의미이 함수는 포맷 문자열을 기반으로 지정된 형식에 맞
31.[ros2] tf broadcaster
ROS 2 (Robot Operating System 2)에서 tf broadcaster의 개념은 ROS 1의 tf와 매우 유사하지만, ROS 2의 새로운 통신 구조와 기능들을 활용하여 더욱 발전되었습니다. tf broadcaster는 로봇의 다양한 부품들 사이의 상대
32.ros2 bag
ROS 2 bag는 ROS 메시지 데이터를 기록하고 재생하는 데 사용되는 도구ROS 2 환경 설정: source /opt/ros/<distro>/setup.bash 실행Bag 기록 시작: 다음 명령어를 사용하여 ROS 2 메시지 기록을 시작합니다.<bag_n
33.[ros2] sensor_msgs /CameraInfo.msg
sensor_msgs /CameraInfo.msg should be in a camera namespace on topic "camera_info" and accompanied by up to five image topics named: image_raw - raw d
34.[ros2] extrinsic을 publish / subscirbe 하는 다양한 방법
ROS2에서 가장 일반적인 방법은 TF2 라이브러리를 사용하여 카메라의 위치와 방향을 표현하는 변환(transform)을 publish하는 것TF2는 좌표 변환을 쉽게 관리하고, 시간에 따른 변환의 추적을 가능하게 해줌카메라와 같은 센서의 경우, 카메라의 포즈(pose
35.ros2 bag play
ros2 bag play 명령은 ROS 2에서 rosbag2를 사용하여 저장된 bag 파일을 재생하는 데 사용이 명령을 사용하면 bag 파일에 기록된 모든 메시지가 실시간으로 ROS 2 시스템에 다시 게시되므로, 시스템의 다른 노드가 이 메시지를 구독하고 처리할 수 있
36.[ros2] rviz
ROS 2의 RViz2는 로봇 시스템의 다양한 데이터를 시각화하는 강력한 도구터미널에서 다음 명령어를 입력하여 RViz2를 시작할 수 있습니다:RViz2의 주요 인터페이스 구성 요소는 다음과 같습니다:Displays: 여기에서는 다양한 유형의 데이터를 시각화하기 위한
37.[ros2] topic subscribe 시, 원하는 시간의 timestamp 데이터를 불러오는 방법
아래는 수정된 코드로, 타입 어노테이션을 추가하고, Google 스타일의 한글 docstring을 작성하여 각 메소드 및 클래스에 대한 설명을 포함하고 있습니다. 이러한 문서화는 코드의 이해도를 높이고, 유지 보수를 용이하게 하는 데 도움이 됩니다.이 코드는 Close
38.[ros2] topic subscribe 시, 원하는 시간의 timestamp 데이터를 불러오는 방법
아래는 수정된 코드로, 타입 어노테이션을 추가하고, Google 스타일의 한글 docstring을 작성하여 각 메소드 및 클래스에 대한 설명을 포함하고 있습니다. 이러한 문서화는 코드의 이해도를 높이고, 유지 보수를 용이하게 하는 데 도움이 됩니다. 이 코드는 Clo
39.[ros2] rclpy.time.Time
rclpy.time.Time은 ROS 2에서 시간을 나타내기 위한 클래스이 클래스는 ROS 시스템에서 시간을 다루는 표준 방법을 제공하며, 특히 시간에 관련된 연산이나 시간 비교, 시간 기반의 처리를 할 때 사용rclpy.time.Time 객체는 내부적으로 두 부분,
40.존재하는 ros2 bag 파일에, 새로운 publish data를 write 하는 방법
이미 생성된 .db3 bag 파일에 새로운 메시지를 추가하는 것은 -> 기존의 bag 파일을 직접 수정하는 것이 아니라, 새로운 메시지를 기록한 후 필요하다면 병합하는 방식으로 처리됨 여기서는 새로운 ROS 2 publisher를 생성하고 이를 사용하여 메시지
41.[python] ROS time ??
rclpy.time.Time에서 사용하는 "실제 시간"의 기준은 시스템 시간이는 일반적으로 Unix epoch(1970년 1월 1일 00:00:00 UTC)부터 현재까지의 시간을 기준 rclpy.time.Time의 "실제 시간"과 Python 표준 라이브러리의 time