c++
1.[c++] `.h` 파일과 `.cc` 파일

C++에서는 이러한 파일들을 사용하여 코드의 구조를 체계적으로 관리하고, 컴파일 과정을 통해 최종 실행 파일을 생성역할: .h 파일은 헤더 파일이라고 불리며, 함수, 클래스, 변수 등의 선언을 포함이 파일은 코드의 인터페이스를 정의하는 데 사용기능: 다른 파일이나 모듈
2.[c++] 프로그램 실행하기!
이 과정에서는 C++의 클래스 개념을 활용하여 사칙연산 계산기를 작성하고, 프로젝트를 설정하여 컴파일하고 실행하는 방법을 설명먼저, C++ 개발 환경을 준비해야 함 이 예제에서는 Ubuntu 환경에서 개발하는 방법을 설명터미널을 열고 아래 명령어를 입력하여 C++ 개발
3.[c++] cmake ?
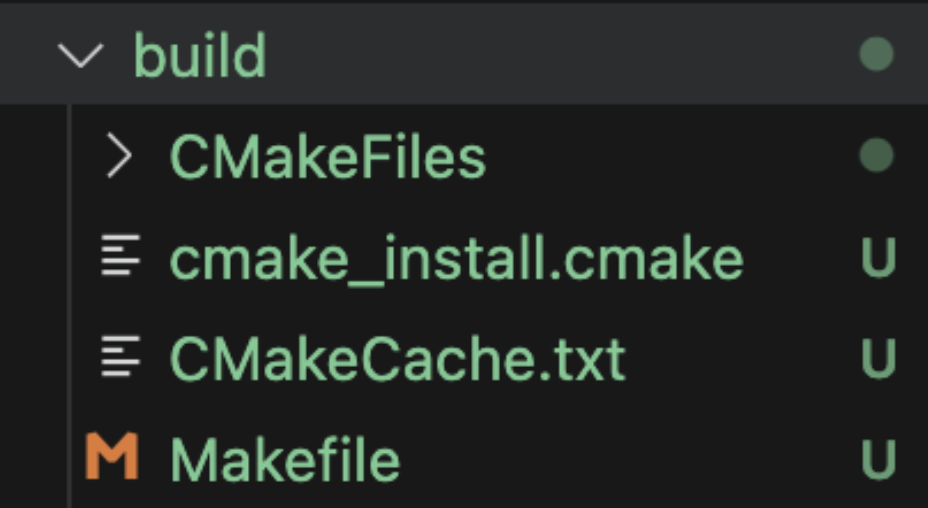
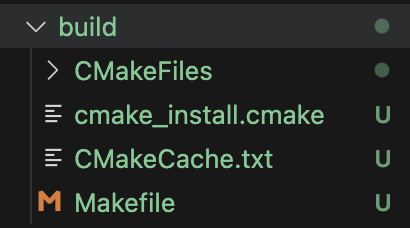
CMake를 실행했을 때 생성된 파일과 디렉토리들이 어떤 의미를 가지는지 설명해드리겠습니다. cmake .. 명령어는 CMake를 통해 프로젝트의 빌드 설정을 생성하는 역할을 합니다. 이제 생성된 각 파일과 디렉토리의 의미를 설명하겠습니다:역할: CMake가 프로젝트를
4.[c++] 함수
C++에서 함수는 다음과 같은 구조를 가집니다:반환형: 함수가 결과로 반환할 값의 데이터 타입. 반환할 값이 없으면 void를 사용.함수이름: 함수의 이름으로, 호출할 때 사용.매개변수: 함수에 전달되는 입력 값. 여러 개일 수 있으며, 없을 수도 있음.return 값
5.[c++] 클래스
데이터를 구조화하고 해당 데이터를 처리하는 방법을 정의클래스는 속성(멤버 변수)과 동작(멤버 함수, 메서드)를 포함하는 구조체클래스의 기본 구조는 다음과 같습니다:멤버 변수: 클래스 내부에서 객체의 상태를 저장하는 변수.멤버 함수(메서드): 객체가 수행할 동작을 정의한
6.[c++] cmake / catkin / colcon
Catkin, Colcon, and CMake는 C++ 프로그램을 빌드하는 데 사용되는 도구들이지만, 각기 다른 목적과 사용 사례에 맞게 설계되었습니다. 이들을 비교하고, 예시를 통해 실제로 빌드를 수행하는 방법을 설명하겠습니다.CMake: 일반적인 C++ 프로젝트를
7.[c++] ros2 pub / sub
1. ros2 공식 문서 C++로 간단한 퍼블리셔와 서브스크라이버 작성하기 목표: C++를 사용하여 퍼블리셔와 서브스크라이버 노드를 생성하고 실행합니다. 작업 내용 1. 패키지 생성 새 터미널을 열고 ROS 2 설치 경로를 소스하여 ros2 명령이 동작하도록 합
8.[c++] 스마트 포인터
tsdf_integrator\_.reset(new FastTsdfIntegrator(integrator_config, tsdf_map\_->getTsdfLayerPtr())); 부분이 잘 이해되지 않는 이유는 reset 함수가 특별히 정의된 것이 아니라, 이는 std:
9.[c++] C++ 프로그램의 Entry Point
./calculator를 실행하면 main 함수가 자동으로 실행되는 이유는 C++에서 main이 진입점(entry point) 으로 지정된 함수이기 때문컴파일러와 운영체제는 이 규칙을 따르기 때문에, 컴파일 후 생성된 실행 파일이 항상 main 함수에서부터 시작하게 돼
10.[c++] make install
좋아! make install 과정이 C++ 빌드에서 무슨 일을 하고, 어떻게 라이브러리가 설치되는지를 문법적으로 차근차근 설명해줄게. 이 과정을 이해하면 C++ 프로젝트에서 라이브러리를 어떻게 "사용할 준비"를 하는지 더 잘 알 수 있어. 😊make는 소스 코드 파
11.[c++] opencv 불러와서 써보기!
C++에서는 Python의 pip install과 같은 간편한 방법이 없지만, 대신 패키지 매니저나 CMake로 외부 라이브러리를 관리할 수 있어. OpenCV 같은 라이브러리를 C++ 프로젝트에 추가하는 가장 일반적인 방법은 CMake를 이용한 의존성 관리야. 지금부
12.[c++] Cmake에서의 install()
TARGETS calculator: calculator라는 실행 파일을 설치할 거야. 이 실행 파일은 우리가 빌드할 때 만든 calculator 프로그램이야.RUNTIME DESTINATION /usr/local/bin: /usr/local/bin은 실행 파일이 저장
13.[c++] CMakeList 문법
find_package(): CMake가 시스템에서 OpenCV 라이브러리를 찾는 명령REQUIRED: OpenCV를 반드시 찾아야 한다는 조건이야. 만약 OpenCV를 찾지 못하면 빌드가 중단되고 에러가 발생해.OpenCV는 여러 헤더 파일과 라이브러리 파일로 이루어
14.visual studio code에서 c++ 사용하기
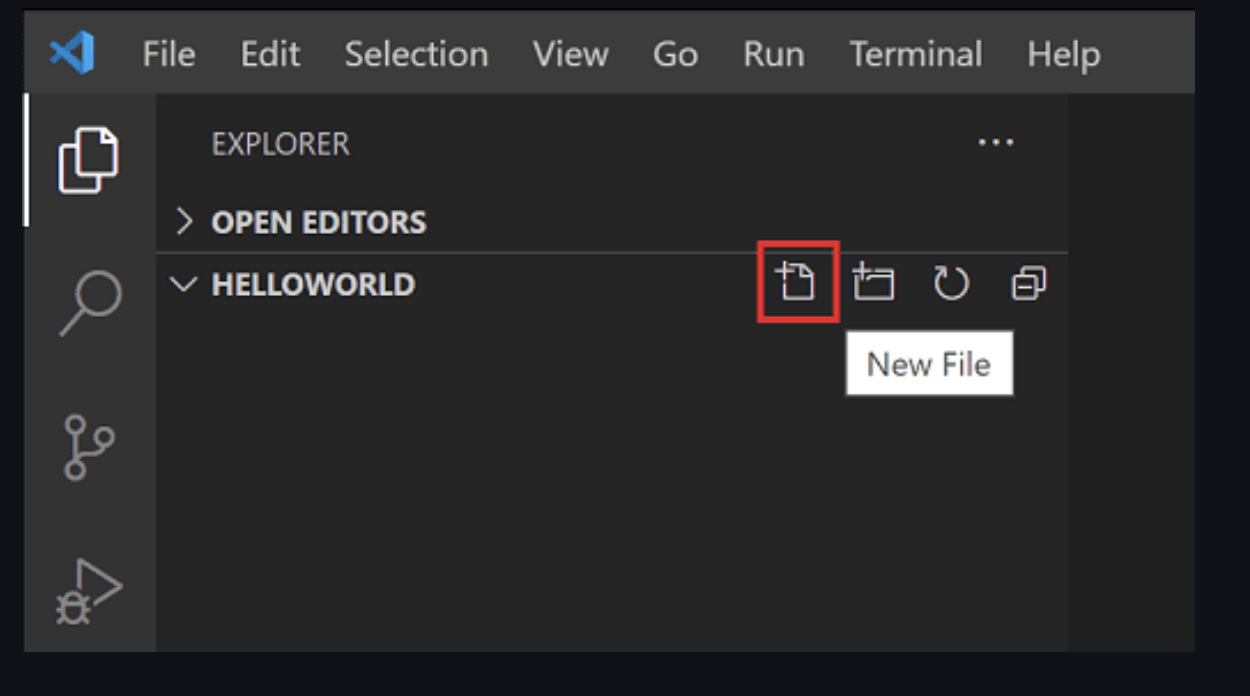
컴파일러가 올바르게 설치되고 구성되었는지 확인하려면, Hello World C++ 프로그램을 만들어 보겠습니다.macOS와 Linux에서는 터미널에 다음 명령어를 입력합니다. 다음 명령어들은 VS Code 프로젝트를 모두 저장할 수 있는 빈 폴더 projects를 생
15.[c++] g++ 직접 컴파일 VS CMake 사용
두 방법 모두 C++ 프로그램을 컴파일하고 실행 파일을 생성하는 과정이지만, 각자의 목적과 사용 시나리오가 다릅니다. 단순하고 빠르게 컴파일할 수 있음.소규모 프로젝트나 단일 파일 컴파일에 적합.의존성 관리나 복잡한 설정이 필요 없을 때 사용.빠르고 간단함: 터미널에서
16.[c++] clang-format ( Like yapf)
C++ 코드의 스타일을 자동으로 정리하고 형식을 맞추기 위해, Python에서 yapf처럼 C++에도 비슷한 도구를 사용할 수 있습니다. 가장 널리 사용되는 도구는 clang-format이며, 이 도구는 C++, C, 그리고 Objective-C 코드의 형식을 자동으로
17.[c++] 메서드 정의를 클래스 정의 외부에서 하는 이유
클래스 정의 내부가 아닌 외부에서 멤버 함수를 정의하는 것은 C++에서 선택할 수 있는 설계 방법으로, 다음과 같은 이유로 사용됩니다. 클래스 정의 외부에서 멤버 함수를 정의하는 것은 객체지향 프로그래밍에서 더 좋은 설계 원칙에 부합하며, 유지보수, 확장성, 가독성 등