Ros
1.Node

참고 링크 : 오로카 8강노드 : 최소 단위 실행 가능한 프로세스메세지 : 노드와 노드 사이에 입력과 출력으로 서로 주고 받는 데이터(int, float, bool, str)메세지 통신 : 메세지를 주고 받는 방식토픽서비스액션파라미터$ ros2 run 패키지명$ ros
2021년 3월 31일
2.Interface
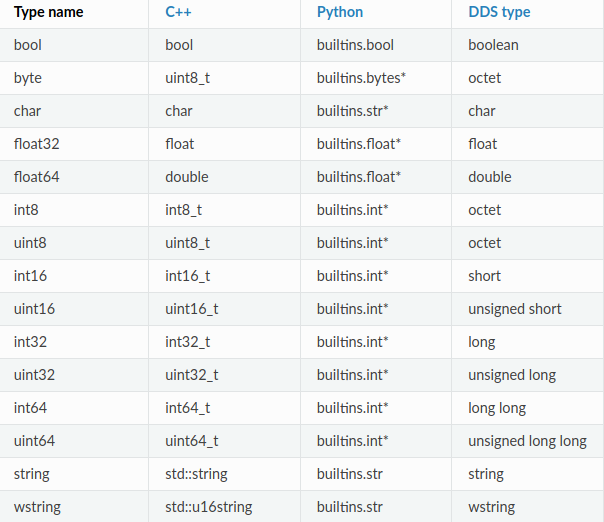
참고 링크 : 오로카 16강: 노드 간에 데이터를 주고받을 때 토픽, 서비스, 액션이 사용되는데 이 때 사용되는 데이터의 형태msgsrvactionIDL(interface definition language)각 인터페이스 파일(msg, srv, action)에서 정의할
2021년 4월 5일
3.Topic
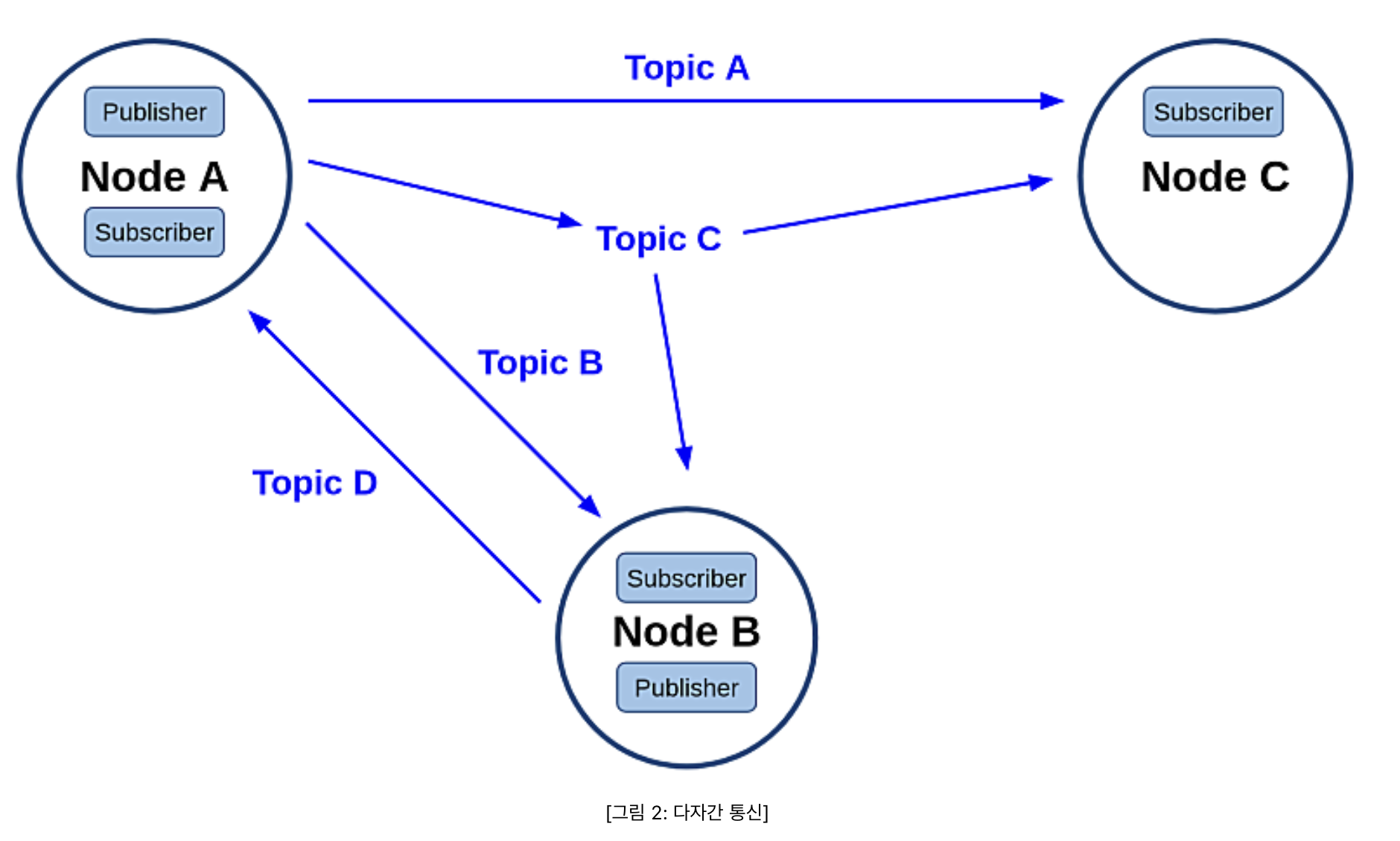
토픽 토픽 : 비동기식 단방향 메시지 송수신 방식 msg 메시지 형태의 메시지를 발간하는 publish와 메시지를 구독하는 subscriber로 구성 1 : N / N : 1 / N : N 통신이 가능 Ros에서 널리 쓰이는 통신 방식 publish와 subscri
2021년 4월 1일
4.Ros2 Programming(interface)
참고 링크 : oroca 027강 인터페이스 : 노드 간에 데이터를 주고 받을 때에 토픽, 서비스, 액션이 사용되는데 이 때 사용되는 데이터의 형태구성된 패키지를 별도로 만들어 사용하는 것이 의존성면에서 관리하기 편하다.A라는 패키지에서 a라는 인터페이스를 사용 B,C
2021년 5월 5일