참고 링크 : 오로카 16강
Ros2 Interface
: 노드 간에 데이터를 주고받을 때 토픽, 서비스, 액션이 사용되는데 이 때 사용되는 데이터의 형태
- msg
- srv
- action
- IDL(interface definition language)
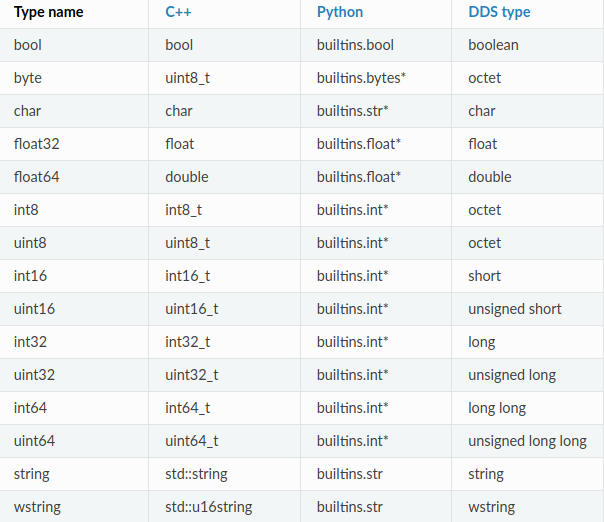
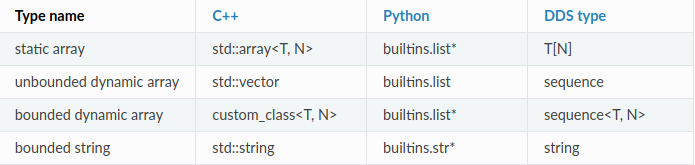
데이터의 종류
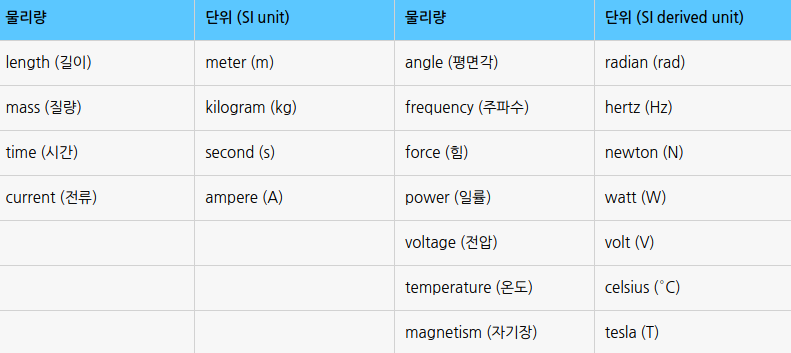
표준 단위
각 인터페이스 파일(msg, srv, action)에서 정의할 때 아래와 같이 기술
fieldtype1 fieldname1
fieldtype2 fieldname2
fieldtype3 fieldname3
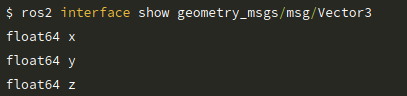
ex)
float64 x
float64 y
float64 zCode
#메시지 인터페이스 확인
$ ros2 interface show [메시지이름]
#개발 환경의 모든 msg, srv, action 보여줌
$ ros2 interface list
#msg, srv, action 인터페이스를 담고 있는 패키지의 목록을 보여줌
#패키지 옵션에 패키지명을 입력하면 한 패키지에 포함된 인터페이스를 보여줌
$ ros2 interface packages [패키지명]
#인터페이스의 기본 형태 표시
$ ros2 interface proto [특정 인터페이스].msg
geometry_msgs/msg/Twist 는 메시지 안에 메시지를 품고 있는 구조이다. Vector 형태의 linear와 angular의 이름을 가진 2개의 메시지를 가지고 있다. 2개의 메시지는 각각 float64의 x,y,z값이 존재한다.

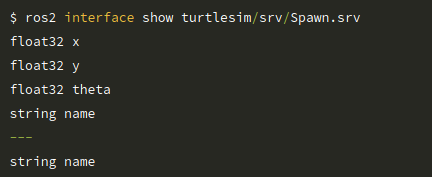
.srv
--- 로 생긴 구분자를 가지고 있는데 Request와 Response를 구분해준다.
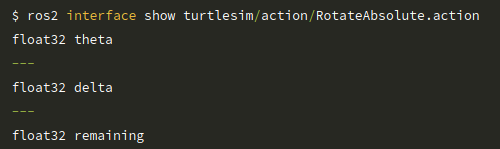
.action
서비스와 마찬가지로 구분자(---)를 가지고 액션 목표, 액션 결과, 액션 피드백으로 나누어 사용하게 된다.