[Differentiable Manifold Reconstruction for Point Cloud Denoising]
Quick Look
Authors & Affiliation: [Shitong Luo, Wei Hu][Wangxuan Institute of Computer Technology, Peking University]
Link : https://arxiv.org/pdf/2007.13551.pdf
Comments: Published at ACMM 2020
TLDR: Point Cloud denoising with differentiable manifold reconstruction
Relevance: 4
Research Topic
- Category (General) : Computer Vision
- Category (Specific) : Point Clouds Denoising
Paper summary (What)
[Summary of the paper - a few sentences with bullet points. What did they do?]
-
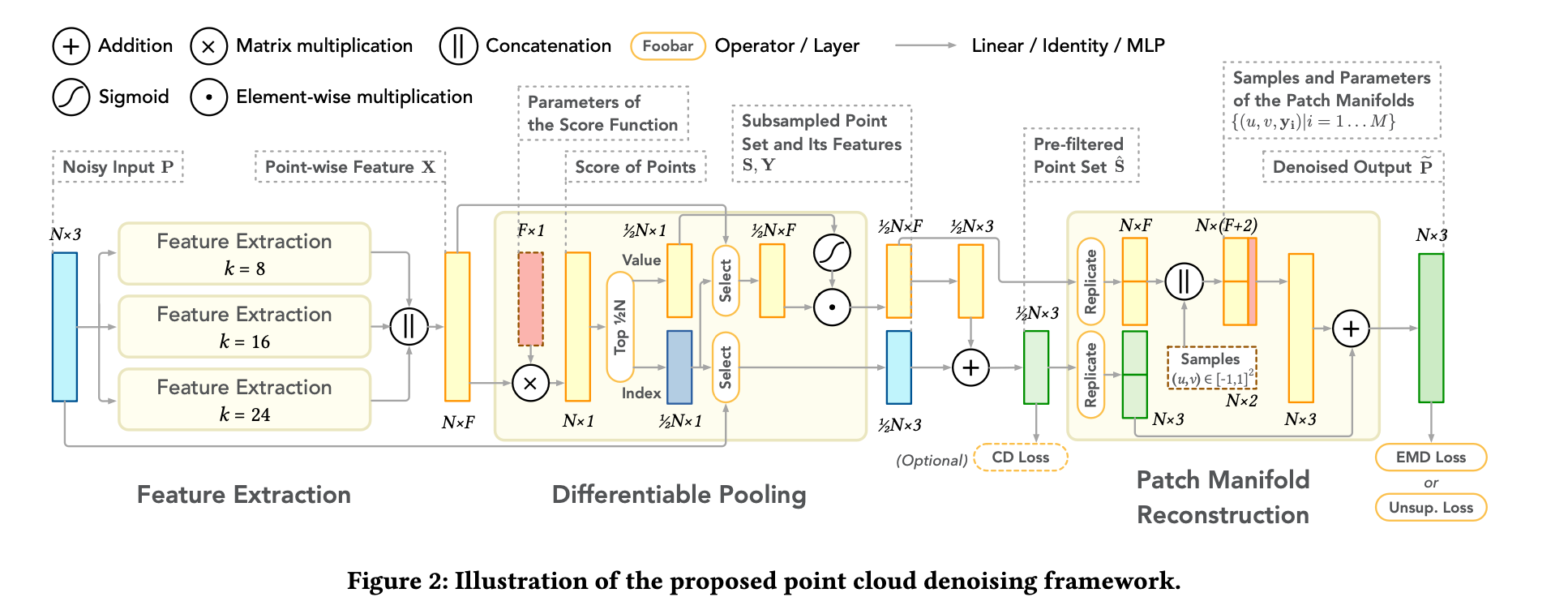
We propose a differentiable manifold reconstruction paradigm for point cloud denoising, aiming to learn the underlying manifold of a noisy point cloud via an autoencoder-like framework.
-
manifold: 차원을 축소할 때, 모든 정보의 대표성을 지닌채로 축소된 데이터의 분포
ex) 스위스롤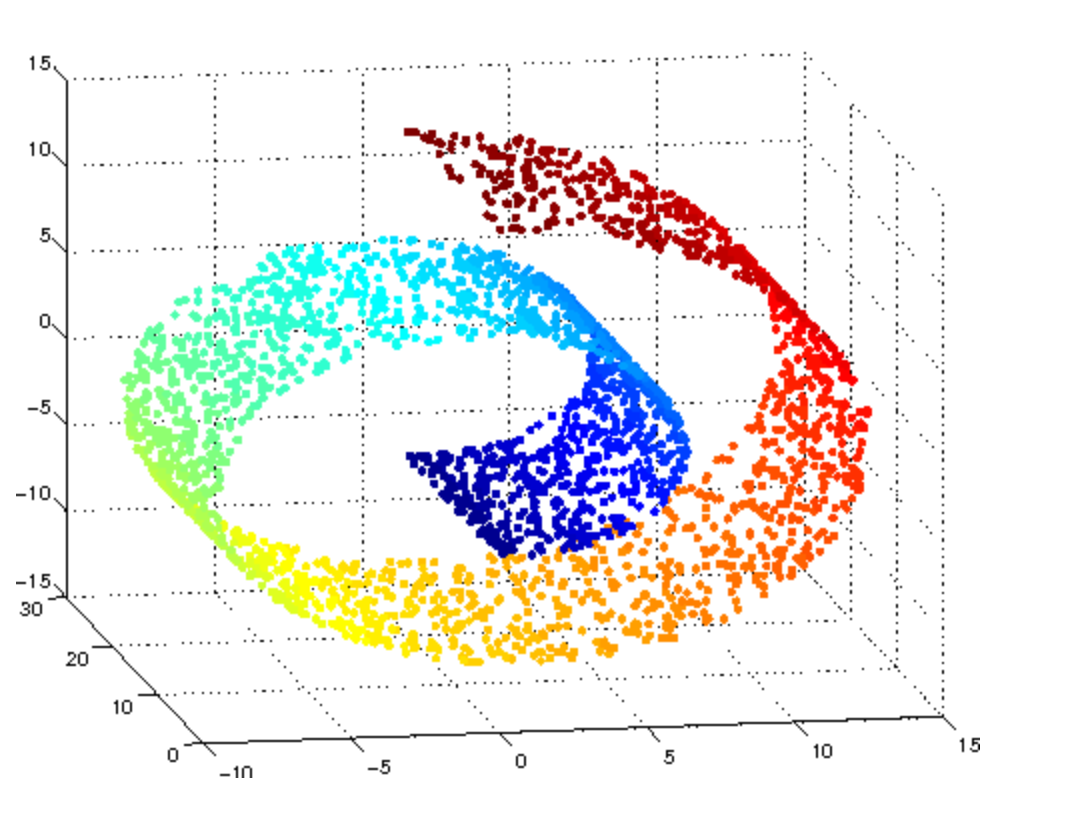
-
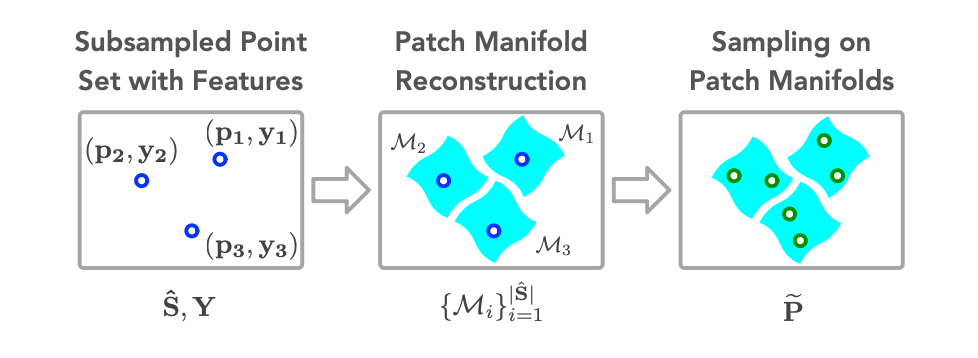
We propose an adaptive differentiable pooling operator on point clouds, which samples points that are closer to the underlying surfaces and thus narrows down the latent space for reconstructing the underlying manifold.
-
We infer the underlying manifold by transforming each sampled point along with the embedded feature of its neighborhood to a local surface centered around the point—a patch manifold.
-
We design an unsupervised training loss, so that our network can be trained in either an unsupervised or supervised fashion.
Issues addressed by the paper (Why)
[What are the issues that the paper addresses? Describe the problem. Why did they write this paper?]
- point clouds data are often contaminated by noise due to inherent limitations of scanning devices or matching ambiguities in the reconstruction from images
- In general, these methods infer the displacement of noisy points from the underlying surface and reconstruct points, which however are not designated to recover the surface explicitly and may lead to suboptimal denoising results
Detailed Information (How)
Methodology
[How did they approach the problem. What methods did they use? ]
- Hence, point cloud denoising is crucial to relevant 3D vision applications, which is also challenging due to the irregular and unordered characteristics of point clouds.
- To this end, inspired by that a point cloud is typically a representation of some underlying surface or 2D manifold over a set of sampled points, we propose to explicitly learn the underlying manifold of a noisy point cloud for reconstruction, aiming to capture intrinsic structures in point clouds
Assumptions
[What assumptions were made and are these assumptions valid?]
Prominent Formulas
[Can be empty]
Prominent Figures

Results
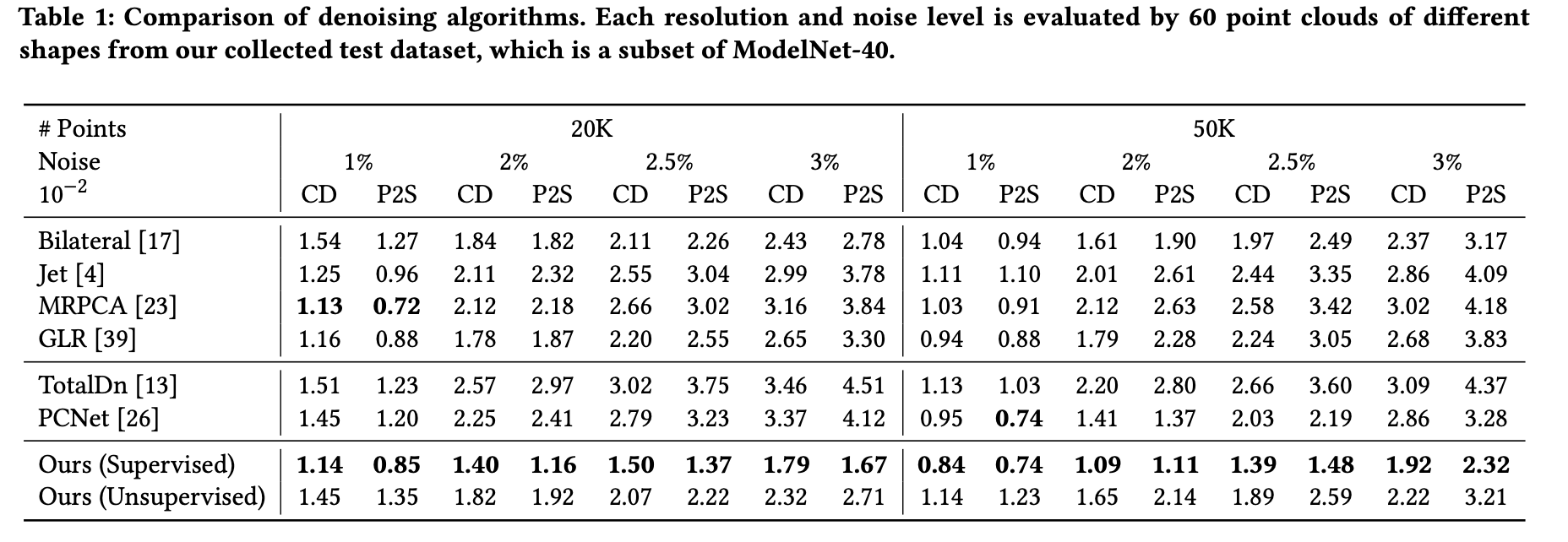
[Theoretical or empirical results (any main tables) ]
Limitations
[Did the authors mention any limitations to their work? Do you see any limitations of their work?]
- normals estimation
- reconstruction
Confusing aspects of the paper
[Is there anything that is confusing and could need better explanations or references?]
Conclusions
The author's conclusions
[What are the authors conclusion? What do they claim about their results.]
- we propose a novel paradigm of learning the underly- ing manifold of a noisy point cloud from differentiably subsampled points.
- By sampling on each patch manifold, we reconstruct a clean point cloud that captures the intrinsic structure.
- Our network can be trained end-to-end in either a supervised or unsupervised fashion.
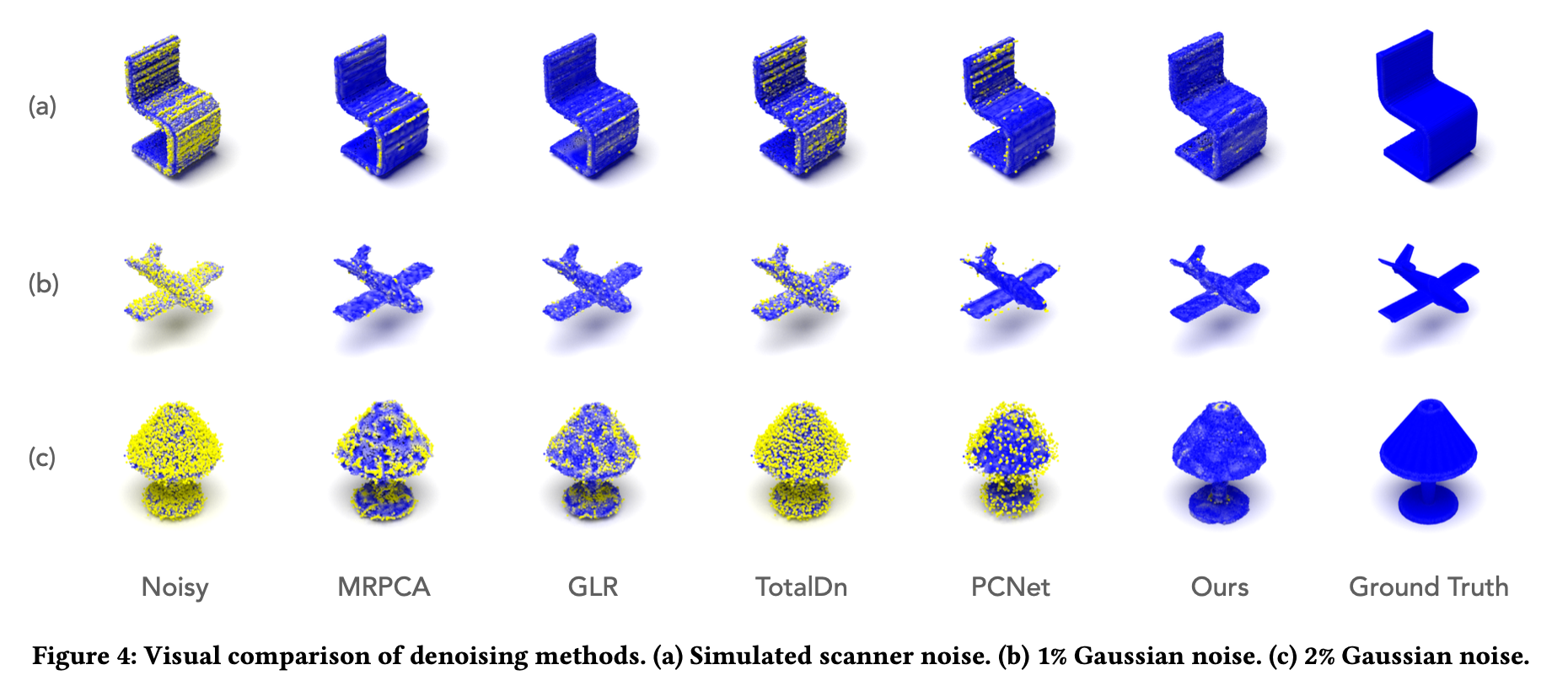
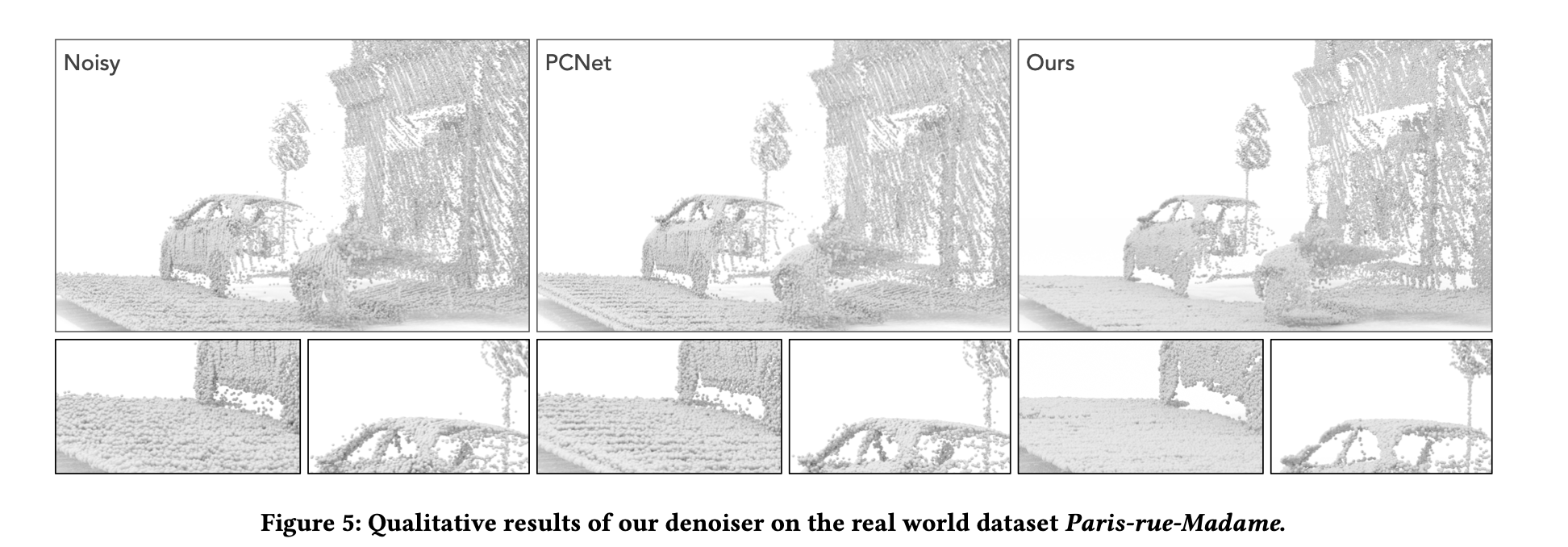
- Extensive experiments demonstrate the superiority of our method compared to the state-of-the-art methods under both synthetic noise and real-world noise.
My Conclusion
[What do you think about the work presented in the article? Did the authors manage to achieve what they set out to achieve?]
Rating
[Fine, Good, Great, Wow, Turing Award ]
Great
Possible future work / improvements
[Can you think of ways to improve this paper or ideas for future work?]
Extra
- Cited references to follow up on / related papers:
- Source code/ blog/ twitter thread/ other links: https://github.com/luost26/DMRDenoise
