Gimbal Lock(짐벌 락) 현상
오일러 각(Euler Angle)
- 어떤 물체의 방향을 3차원 공간 좌표계의 회전으로 이해하는 것
- 3차원 공간에 놓인 물체의 방향은 오일러 각도를 사용하여 세 번의 회전을 통해 얻을 수 있다
다음과 같은 3차원 좌표계가 있다고 가정하자
- y축을 고정시킨 채로 z축을 반시계 방향으로 90도 회전하게 되면 y축과 x축이 겹치게 된다
- 이렇게 되면 x축과 y축이 같이 움직이는 현상이 일어나게 되고 이를 짐벌락 현상이라고 한다
짐벌락 현상
Quatemion(사원수)
- 3차원 좌표계에서 회전을 표현할 때, 행렬 대신 사용하는 수학적 개념으로 4개의 값으로 이루어진 복소수 체계이다
- x, y, z 축과 w벡터로 이루어져있다
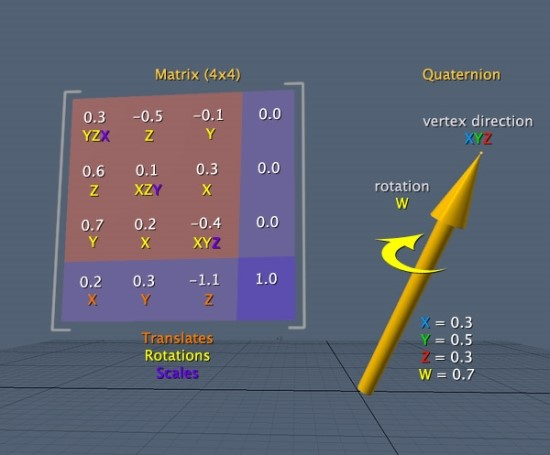
- 짐벌 락 현상이 완벽하게 해결된 것은 아니지만 많이 완화되었다고 한다
| 행렬 | 사원수 | |
|---|---|---|
| 데이터 량 | float 16개 | float 4개 |
| 연산 속도 | float 곱셈 16x16회 | float 곱셈 16회 |
| 결과 | 짐벌 락 등 오류 발생 | 최단호 보간으로 오류 발생률이 적음 |

게임 개발 공부중입니다.