개요
Stanley 알고리즘은 이전의 Pure Pursuit과 마찬가지로 경로 추종 알고리즘 중 하나이다. 하지만, 뒷바퀴 중심을 기준점으로 하는 Pure Pursuit과 달리 앞바퀴 중심을 기준점으로 한다는 차이점이 있다.
Stanley
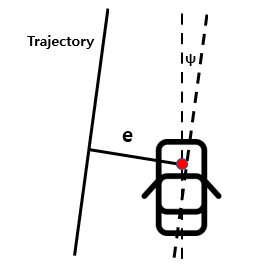
위 그림에서 e는 앞바퀴 중심점과 경로의 거리 오차이며, ψ는 경로의 진행 방향과 차량의 진행 방향 사이의 각도이다. 또한, 스티어링 각도는 δ이다. 이때 Stanley Method는 다음과 같다.
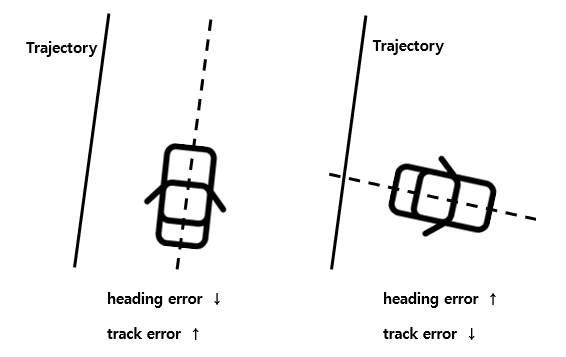
- 헤딩 오차를 제거한다.

- 경로와의 거리 오차를 제거한다.
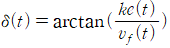
- 최대 조향 각도 범위를 준수한다.

이를 정리하면 다음과 같으며, 분모를 0으로 하지 않기 위해 상수를 추가할 수 있다.
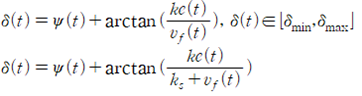
Stanley는 헤딩 오차와 경로 오차를 모두 고려하기에, 헤딩 오차가 크고 경로 오차가 적은 경우와 헤딩 오차가 작고 경로 오차가 큰 경우 모두 효과적으로 주행할 수 있다.
코드 구현
#include <iostream>
#include <array>
#include <cmath>
const double pi{3.141592};
const double L{0.5};
std::array<std::array<double, 3>, 13> path = {{
{0,0,1.57}, //x, y, yaw
{0,1,1.57},
{0,2,1.57},
{0,3,1.57},
{0,4,1.37},
{0.2,4.98,1.19},
{0.57,5.91,1.04},
{1.07,6.77,0.85},
{1.73,7.52,0.74},
{2.47,8.2,0.71},
{3.23,8.85,0.64},
{4.03,9.45,0.47},
{4.92,9.9,0}
}};
double getDist(std::array<double, 3> point1, std::array<double, 3> point2){
double dist = sqrt(pow(point2[0] - point1[0],2) + pow(point2[1] - point1[1],2));
return dist;
}
std::array<double, 3> Drive(std::array<double, 3> curr_pos, int curr_spd){
curr_pos[0] += curr_spd * cos(curr_pos[2]);
curr_pos[1] += curr_spd * sin(curr_pos[2]);
return curr_pos;
}
class Stanley
{
private:
double k{0.53};
public:
int getCloseIndex(std::array<double, 3> curr_pos){
double min_dist{9999}, dist;
int min_index;
for (int i=0;i<13;i++){
dist = getDist(curr_pos, path[i]);
if (dist < min_dist){
min_dist = dist;
min_index = i;
}
}
return min_index;
}
double getTrackError(std::array<double, 3> curr_pos, int curr_spd, int close_index){
std::array<double, 3> curr_wp = path[close_index], next_wp = path[close_index+1];
double e_numerator = (next_wp[0] - curr_wp[0]) * (curr_wp[1] - curr_pos[1]) - (curr_wp[0] - curr_pos[0]) * (next_wp[1] - curr_wp[1]);
if (e_numerator < 0) e_numerator = -e_numerator;
double e_denominator = sqrt(pow(next_wp[0] - curr_wp[0], 2) + pow(next_wp[1] - curr_wp[1], 2));
double track_error = atan2(k * (e_numerator / e_denominator), curr_spd);
return track_error;
}
double getHeadingError(std::array<double, 3> curr_pos, std::array<double, 3> curr_wp){
double heading_error = curr_wp[2] - curr_pos[2];
return heading_error;
}
double getSteeringAngle(double track_error, double heading_error, int max_steer){
double steering_angle = track_error + heading_error;
if (steering_angle > (max_steer*pi/180)) steering_angle = max_steer*pi/180;
else if (steering_angle < -(max_steer*pi/180)) steering_angle = -max_steer*pi/180;
return steering_angle;
}
};
int main(){
double steering_angle, heading_error, track_error;
int curr_spd{1}, max_steer{30}, close_index;
std::array<double, 3> curr_rear_pos = {0,0,atan2(1,0)};
std::array<double, 3> curr_front_pos;
Stanley stanley;
while (true){
std::cout<<"current_position : ";
for(int j=0;j<2;j++){
std::cout<<curr_rear_pos[j]<<'\t';
}
std::cout<<"heading : "<<(curr_rear_pos[2]/pi*180)<<'\t';
double dist = getDist(curr_rear_pos, path[12]);
std::cout<<"dist : "<<dist<<std::endl;
if (dist < 0.5) break;
curr_front_pos = {curr_rear_pos[0] + L * cos(curr_rear_pos[2]), curr_rear_pos[1] + L * sin(curr_rear_pos[2]), curr_rear_pos[2]};
close_index = stanley.getCloseIndex(curr_rear_pos);
track_error = stanley.getTrackError(curr_front_pos, curr_spd, close_index);
heading_error = stanley.getHeadingError(curr_front_pos, path[close_index]);
steering_angle = stanley.getSteeringAngle(track_error, heading_error, max_steer);
curr_rear_pos[2] += curr_spd * tan(steering_angle) / L;
curr_rear_pos = Drive(curr_rear_pos, curr_spd);
}
return 0;
}
Reference

늦더라도 끝이 강한 내가 되자