오늘 배운 것들
1. 완전탐색 알고리즘
완전탐색(Exhaustive Search)은 말 그대로 모든 경우의 수를 시도하는 알고리즘이다.
해당되는 방법으론:
- 모든 순열을 테스트 해보는 방법(순서를 알아야 하는 문제일 때)
- 비트마스크를 이용(flag를 써야할 때. 파이썬에선 쓰기 귀찮아 보인다.)
- DFS, BFS(그래프로 나타낼 수 있는 데이터일 때)
등 이 있다.
말만 들어도 비효율적이기 때문에
1. 완전탐색을 적용해야만 하거나
2. 완전탐색을 이용해도 될 만큼 데이터의 수가 적은 상황
에서만 이용해야 한다.
추가로 백트래킹, 다이나믹 프로그래밍, 기타 데이터의 예상 형식에 맞춘 조건 분기 등을 용해 속도를 개선한다.
1-1. 외판원 순회 2(백준 10971)
도시들의 개수와, 도시 간 이동 비용(최대 1,000,000)이 배열로 주어진다.
모든 도시를 가장 적은 비용으로 순회하는 방법을 찾아야 하는 문제이다.
import sys
N = int(sys.stdin.readline())
MIN = 1000000 * (N+1) + 1
cost_table = [[int(i) for i in sys.stdin.readline().split()] for _ in range(N)]
# O(n!)
def TSP(now :int, to_visit_list :list, cost_now :int) -> None:
global MIN
# 방문 후 기준으로 총 비용을 반환
def _visit(to :int) -> int:
cost_to = cost_table[now][to]
if cost_to:
return cost_now + cost_to
else:
return 0
# 정지조건, 더 이상 갈 곳이 남아있지 않을 때
if not to_visit_list:
# 출발지(0)로 돌아갈 수 있으면 최종 비용을 계산한다.
if cost_table[now][0]!= 0:
cost = _visit(0)
MIN = min(cost, MIN)
# 갈 곳이 남아있다면 방문한다.
for to_visit in to_visit_list:
cost = _visit(to_visit)
if cost and cost < MIN:
new_to_visit_list = to_visit_list[:]
new_to_visit_list.remove(to_visit)
TSP(to_visit, new_to_visit_list, cost)
TSP(0, list(range(1, N)), 0)
print(MIN)단순한 DFS 알고리즘이다.
출발지로 부터 계속 갈 수 있는 곳을 방문한다.
순회를 마치면 비용을 기록한다.
시간 복잡도는 O(n!)이지만 문제의 조건이 2<=n<=10이기 때문에 무리없이 풀 수 있다.
to_visit_list를 비트마스크처럼 bool자료형을 가진 리스트로 풀 수도 있지만(1000ms) 매 분기마다 모든 도시들을 순회하며 확인해야 하므로 시간이 엄청 오래걸린다.(n^n번)
그냥 방문할 목록(또는 방문한 목록)을 저장해 순회(n!번)하도록 하자(100ms).
2. 이진탐색
2-1. 나무 자르기(백준 1920)
import sys
N, M = [int(i) for i in sys.stdin.readline().split()]
TREE = [int(i) for i in sys.stdin.readline().split()]
TREE.sort()
TREE_REV = TREE[::-1]
def main():
def _cut_tree(height :int, from_top :bool) -> int:
result = 0
for i in TREE_REV if from_top else TREE:
if i > height:
result += i-height
elif i <= height:
if from_top:
break
else:
continue
return result
def _bin_search(target :int, start :int, end :int):
nonlocal max_height
if end < start:
return
else:
middle = (start + end)//2
result_mid = _cut_tree(middle, middle>N//2)
if result_mid == target:
max_height = max(max_height, middle)
elif target < result_mid:
max_height = max(max_height, middle)
_bin_search(target, middle+1, end)
else:
_bin_search(target, start, middle-1)
max_height = 0
_bin_search(M, 0, TREE[-1])
print(max_height)
main()그냥 평범한 이진탐색이다.
필요한 만큼 자를 수 있으면 더 올릴 수 있는지 이진탐색,
자를 수 없으면 어디까지 낮춰야 하는지 이진탐색.
완전탐색보다 시간복잡도 -> 로 감소했다.
2-2. 사냥꾼(백준 8983)
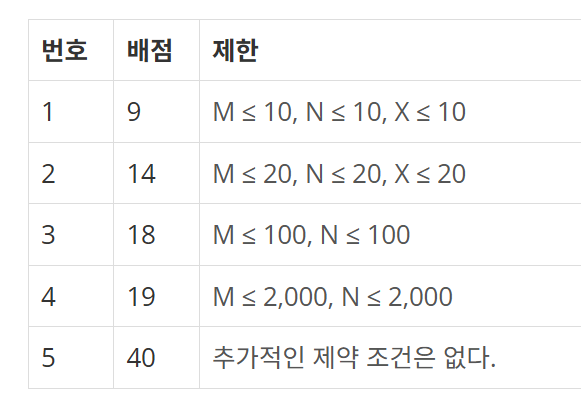 100점을 맞기 위해서는 서브태스크 마지막 (0 <= N, M, L <= 1,000,000,000)을 만족해야 한다.
100점을 맞기 위해서는 서브태스크 마지막 (0 <= N, M, L <= 1,000,000,000)을 만족해야 한다.
따라서 시간 복잡도가 높은 알고리즘으로는 100점을 맞을 수 없다.
처음에는 서브태스크를 신경쓰지 않았기 때문에 내 알고리즘이 최악의 경우 O(nm)임에도 그대로 풀었고, 역시나 마지막 서브태스크는 통과하지 못 했다.
그래도 아쉬우므로 소개하자면:
import sys
def main():
M, N, L = [int(i) for i in sys.stdin.readline().split()]
LANE = [int(i) for i in sys.stdin.readline().split()]
ANIMALS = [tuple(map(int, sys.stdin.readline().split())) for i in range(N)]
MIN_X, MAX_X = [max(0, min(LANE)-L), min(1_000_000_000, max(LANE)+L)]
MAX_Y = L
# (x, y)좌표로 표현된 동물들의 위치를, (x-y, x+y)형식으로 변환
ANIMALS = [(animal[0]-animal[1], animal[0]+animal[1]) for animal in ANIMALS if all((animal[1]<=MAX_Y, MIN_X<=animal[0]<=MAX_X))]
LANE.sort()
ANIMALS.sort()
answer = 0
# 사대 별로 돌아가며 동물들이 사정거리에 들어왔는지 체크
for h in LANE:
lb, rb = h-L, h+L
checked = []
for i, a in enumerate(ANIMALS):
if lb <= a[0]:
if a[1] <= rb:
answer += 1
checked.append(i)
elif rb < a[0]:
break
else:
checked.append(i)
for c in sorted(checked, reverse=True):
ANIMALS.pop(c)
print(answer)
main()아이디어를 잠깐 설명하자면
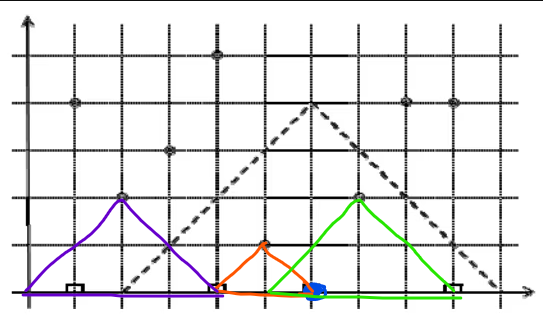
그림의 파란 사대(6)를 기준으로 판단을 하는 경우,
동물들의 위치에서 양 대각선 방향으로 선을 그어 x=0을 변으로 하는 삼각형을 그린다.
아래 변(편의상 '거리막대'라고 하겠다)이 사대를 기준으로 +-사정거리 내에 모두 들어오면 사격이 가능한 경우이다.
연산량은 그냥 맨해튼 거리를 계산하는 경우와 같지만 이렇게 하면 동물들을 정렬하여 사대별로 정지조건을 정하기 편해진다.
전제조건:
1. 사대(LANE)는 오름차순으로 정렬되어 있다.
2. 동물들은 x-y(a[0]), x+y(a[1]) (거리막대)를 키로 하여 오름차순 정렬되어 있다.
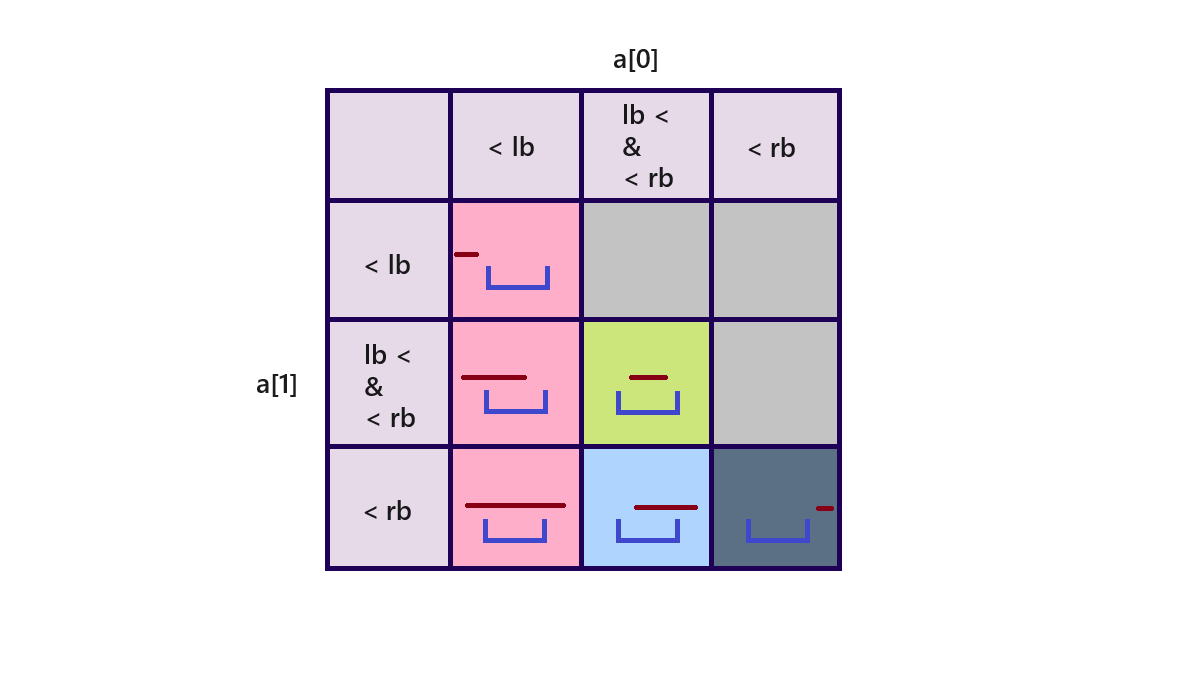 특정 사대에서 동물들을 오름차순으로 순회하면서 사정거리 내에 들어오는지를 체크할 때의 경우의 수를 표현한 그림이다.
특정 사대에서 동물들을 오름차순으로 순회하면서 사정거리 내에 들어오는지를 체크할 때의 경우의 수를 표현한 그림이다.
파란색 위가 잘린 네모는 사대의 왼쪽경계(lb), 오른쪽경계(rb)의 범위를 나타내고
- 붉은 선은 동물들의 거리막대(a[0], a[1])를 선분으로 표시했다.
- 분홍 칸은 더 탐색할 필요가 없는 경우를 나타낸다.
사대가 오름차순 정렬 되어있기 때문에 이후의 사대에서도 사정거리를 벗어날 것이기 때문이다. - 연두 칸은 사정거리 내에 들어온 경우이다. 정답 숫자에 1을 추가하면 된다.
- 파란 칸은 사정거리 내에 들어오지는 않았지만 이후에 다시 확인할 필요가 있는 경우이다.
특히 짙은 파란 칸은 이번 사대에서는 더 이상 탐색할 필요가 없는 경우이다.
위와 같은 기준으로 동물들을 판단해 나갔다.
하지만 시간복잡도가 이기 때문인지, N, M이 큰 경우에는 시간초과가 떴다.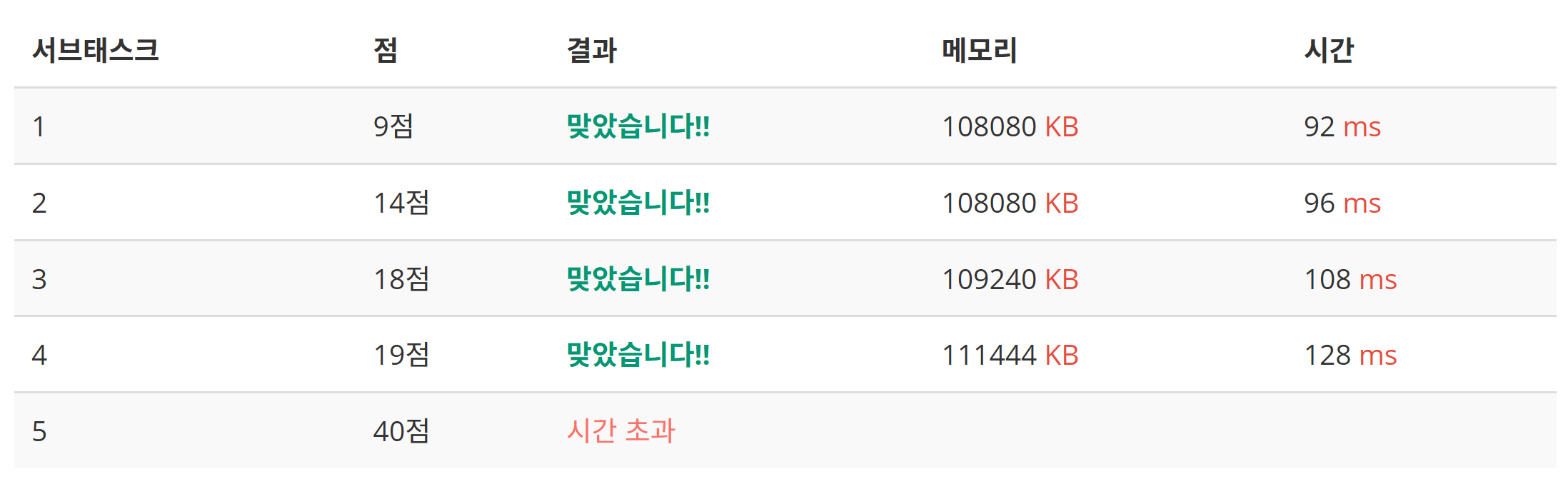
이진탐색을 써야한다는 힌트를 얻어 알고리즘을 수정했다.
힌트를 받고도 오랫동안 고민했으므로 아마 힌트가 없었으면 못 풀었지 싶다.
import sys
from collections import defaultdict
def main():
def bin_search(l, r, start, end):
if start >= end:
return False
mid = (end+start)//2
if LANE[mid] < l:
return bin_search(l, r, mid+1, end)
elif r < LANE[mid]:
return bin_search(l, r, start, mid)
else:
return True
M, N, L = [int(i) for i in sys.stdin.readline().split()]
LANE = [int(i) for i in sys.stdin.readline().split()]
ANIMALS = [tuple(map(int, sys.stdin.readline().split())) for i in range(N)]
MIN_X, MAX_X = [max(0, min(LANE)-L), min(1_000_000_000, max(LANE)+L)]
MAX_Y = L
animals = defaultdict(list)
for x, y in ANIMALS:
if all((y<=MAX_Y, MIN_X<=x<=MAX_X)):
animals[y].append(x)
LANE.sort()
answer = 0
for y, xs in animals.items():
for x in xs:
if bin_search(x-(L-y), x+(L-y), 0, M):
answer += 1
print(answer)
main()y값이 같은 동물들을 묶은 뒤 동물들을 순회하며 사정거리에 들어오는 사대가 있는지를 이진탐색하는 방식이다.
사대를 이진탐색하므로 시간복잡도는
풀고나니 아주 간단하지만 언제나 아이디어를 떠올리는 것이 가장 어려운 것 같다.
 그러나 처음 풀었던 것에 비해서 서브태스크 1~4에서는 더 느리다.
그러나 처음 풀었던 것에 비해서 서브태스크 1~4에서는 더 느리다.
빅오표기법 상으로 더 나은 시간복잡도를 가지지만 느린 경우가 생기는 이유는 빅오표기법의 정의를 생각한다면 알 수 있다.
3. 소소한 것들
3-1. 파이썬 디버깅
vscode에서 디버깅을 눌러도 아무 동작을 안해서
그동안 눈으로 디버깅 해왔는데 드디어 방법을 알았다.
launch.json을 생성해야 작동하는 것이었다.
이모티콘가지고 난리 부렸을 때 알고 있었으면 시간이 절반으로 줄었을 지도(진심으로)
Step Over: 현재 라인을 실행 후 다음 라인으로 이동(함수를 호출해도 다 실행해버린다. 실행만 시키고 싶을 때)
Step Into: 현재 라인을 실행(함수를 호출하면 함수 안으로 이동하여 보여준다. 함수 내부의 동작도 보아야 할 때)
Step Out: 함수를 다 실행하고 밖으로 이동(함수에서 볼 일 다 봤을 때)
