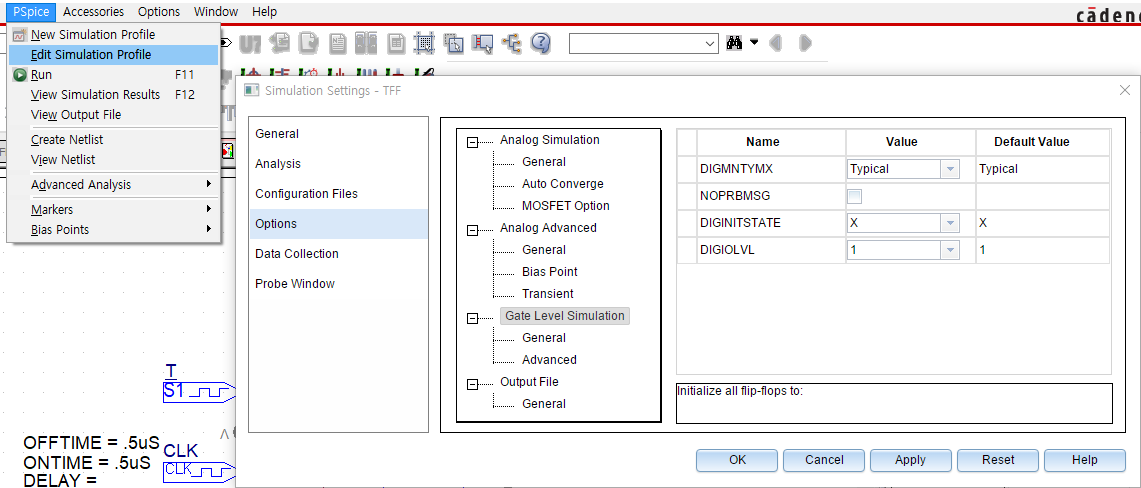
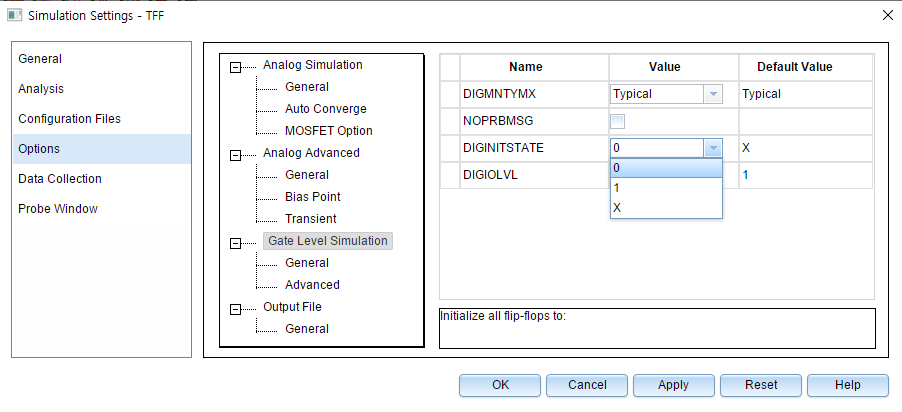
PSpice 펄스값 주기
DigClock

OFFTIME : LOW 지속 시간
ONTIME : HIGH 지속 시간
DELAY : 클럭 펄스 지연시간
STARTVAL : 클럭 펄스의 시작 레벨 설저
OPPVAL : STARTVAL과 반대로 설정
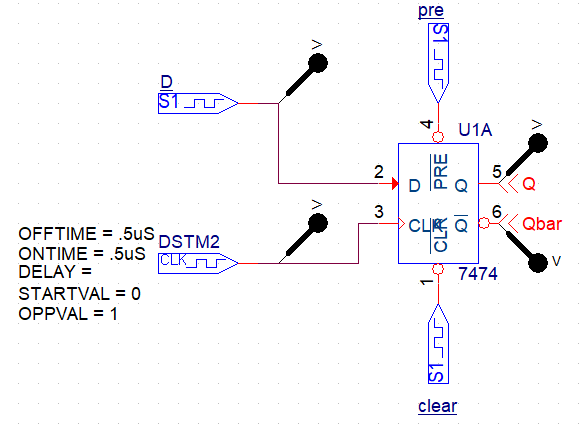
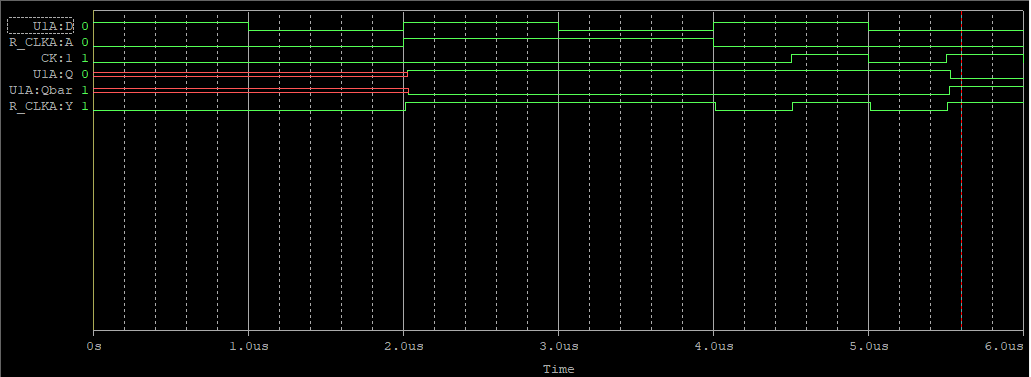
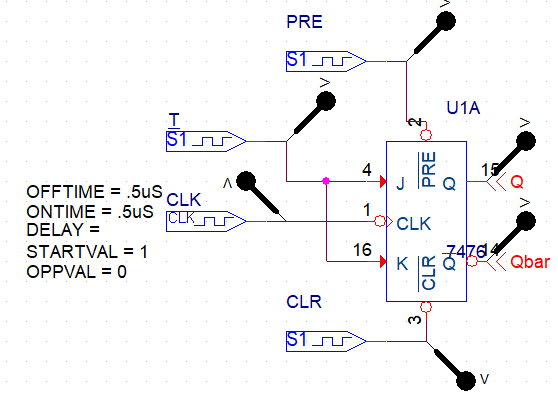
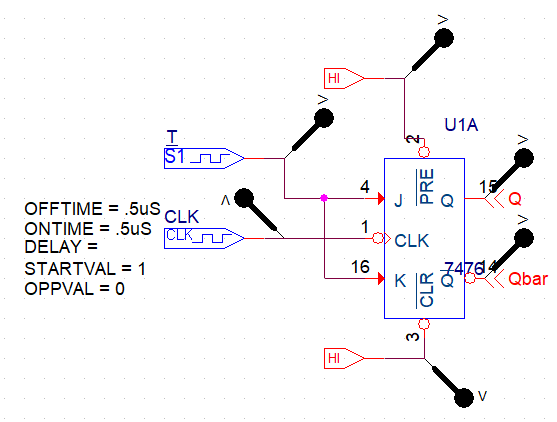
7474 사용
pre와 clr(clear)는 not이 붙어있어 active low로 동작에 주의
회로
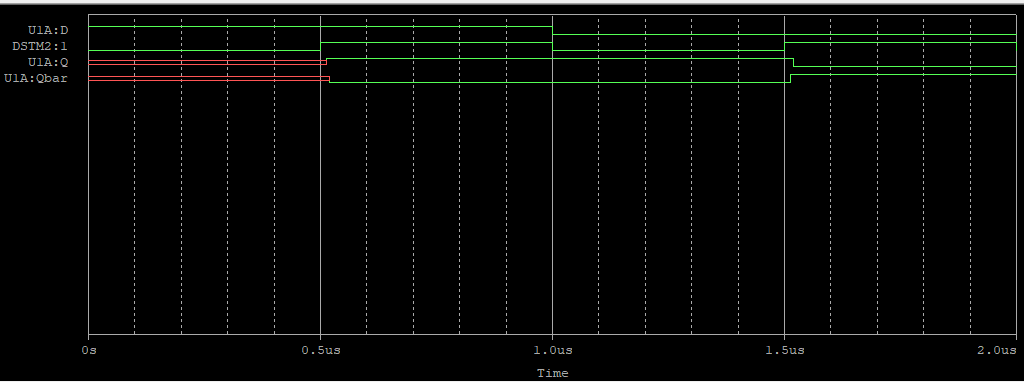
결과
회로
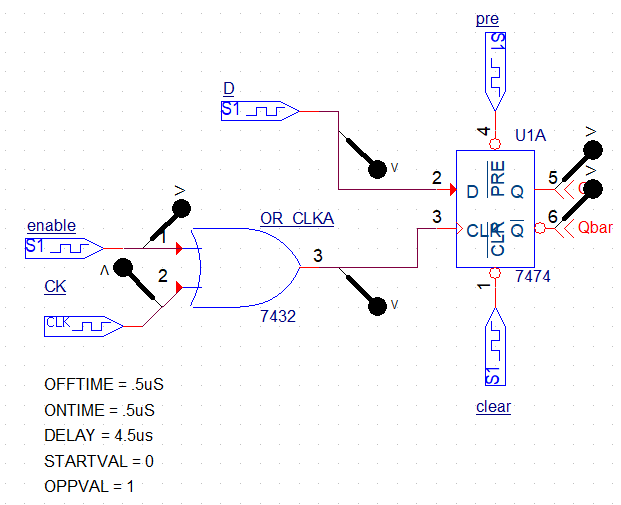
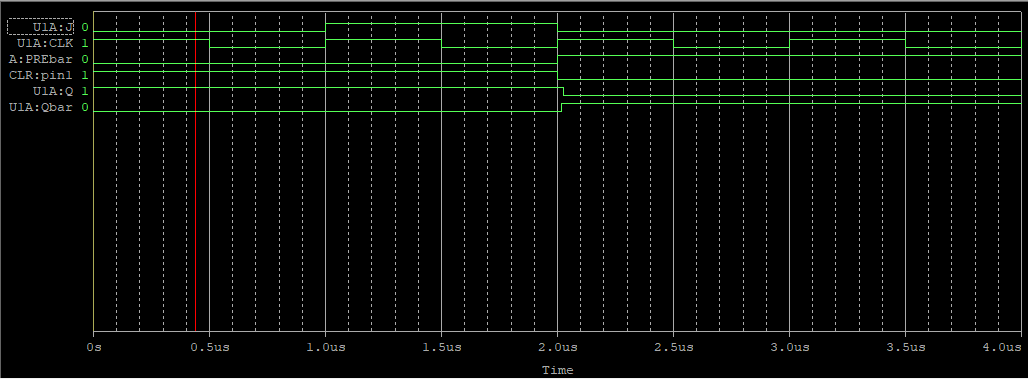
초기값을 모르기때문에 ck가 0일때는 unkown
마지막 enable이 4us 지만 OFFTIME 0.5us후에 펄스 따라서 딜레이4.5us
OR게이트를 통해 클럭 입력에 레벨트리거를 주다가 4.5us후에 펄스를 줘서 동작 확인
결과
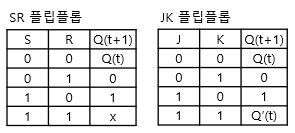
| CK | D | Q | Q` |
|---|---|---|---|
| 0 | 1 | x | x |
| 0 | 0 | x | x |
| 1 | 1 | 1 | 0 |
| 1 | 0 | 0 | 1 |
| ^ | 1 | 1 | 0 |
| ^ | 0 | 0 | 1 |
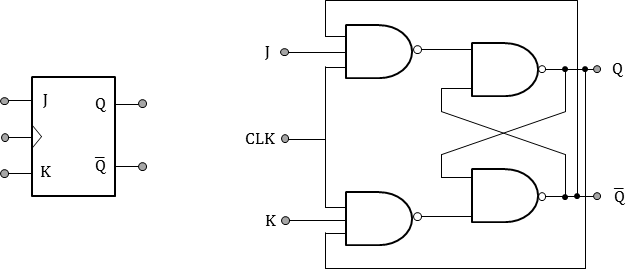
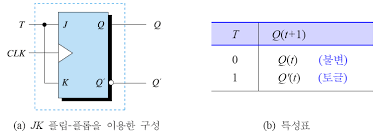
JK 및 T 플립플롭
JK 플립플롭
JK는 직접회로를 최초로 발명한 미국의 물리학자 잭 킬비(Jack Kilby)를 기념하기 위해 붙인 이름. RS 플립플롭의 S에 해당하는 것이 J, R에 해당하는 것이 K 이다. RS의 (1,1)은 금지 이지만 JK의 (1,1)은 토글 동작
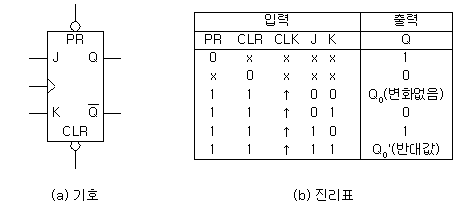
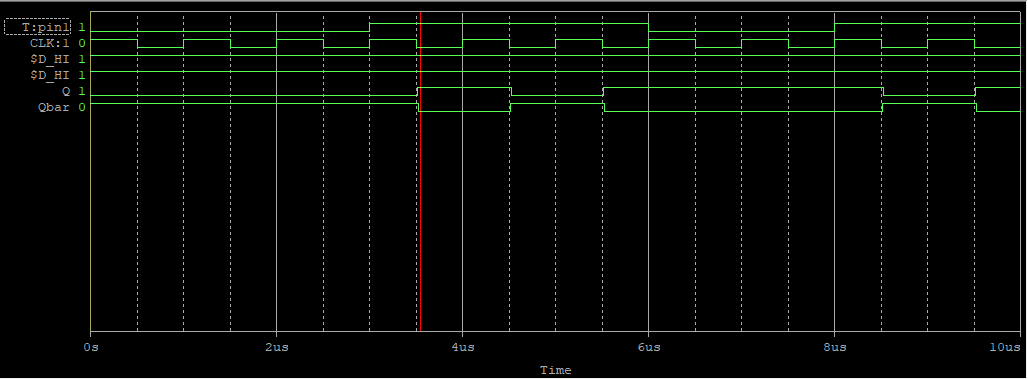
PRE 와 CLR이 있는 경우 (Active-Low 주의)
회로
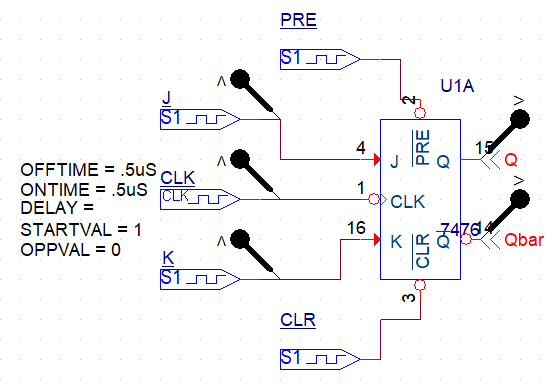
CLK가 Active-Low에서 동작, 하강엣지에서 동작
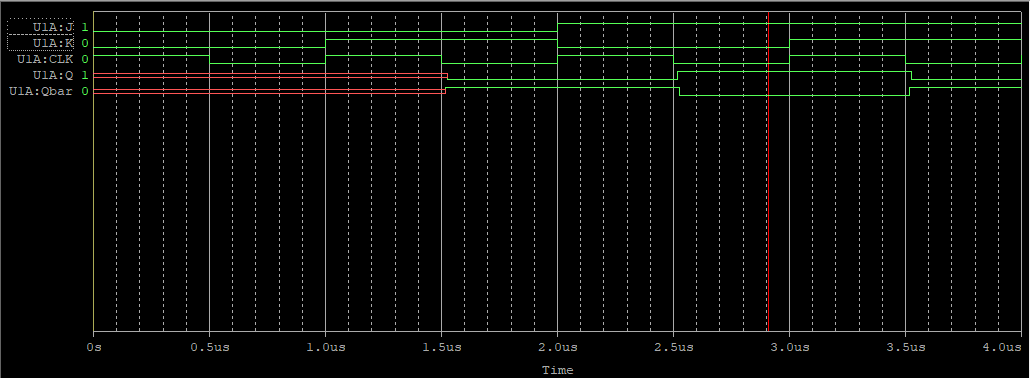
결과
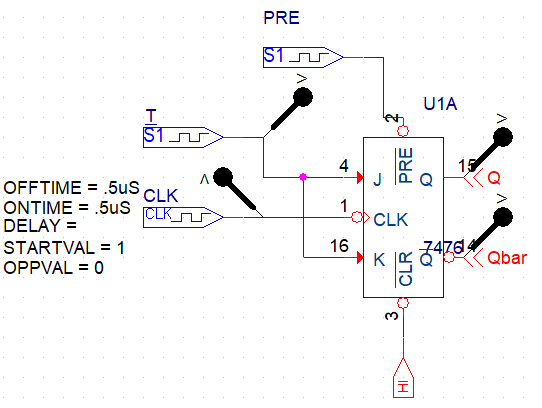
T 플립플롭
T 플립플롭은 JK 플립플롭의 입력 JK를 하나로 묶어 입력 T(Toggle)를 만든 것, 이렇게 해서 JK 플립플롭의 토글 동작만을 사용하게 된다
T 플립플롭도 PRE와 CLR 단자를 가지고 있다.
회로
결과
| CK | T | PR | CLR | Q |
|---|---|---|---|---|
| 하강엣지 | 0 | 0 | 1 | 1 |
| 하강엣지 | 1 | 0 | 1 | 1 |
| 하강엣지 | 0 | 1 | 0 | 0 |
| 하강엣지 | 1 | 1 | 0 | 0 |


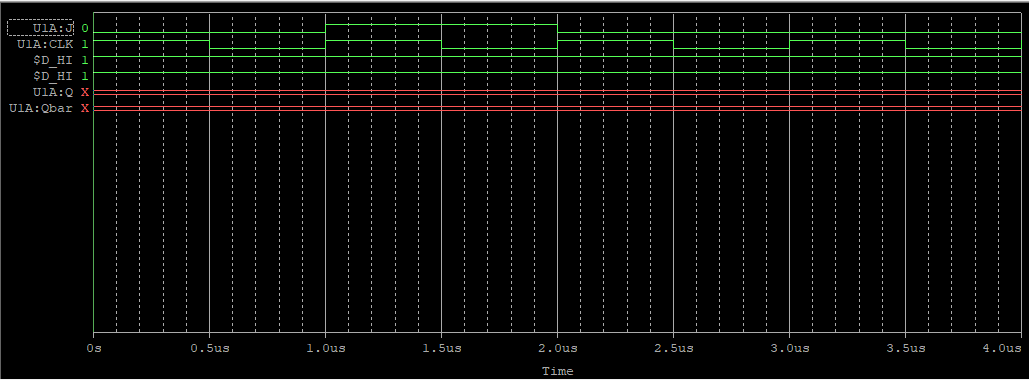
HI/SOURCE는 항상 HI값을 준다
초기값이 설정되어있지 않아 불안정한상태
출력Q의 초기값 설정
회로
결과

회로
초기값 0준뒤 결과
Preset과 Clear는 Clock과 상관없이 플립플롭을 즉시 어떤 특정상태로 가도록 한다.
따라서 이들 입력을 Direct Inputs(직접 입력) 이라고도 하고 clock과 무관(독립)하다고 해서 Asynchronous input(비동기 입력)이라고도 한다
쉬프트 레지스터
플립플롭
- 1비트의 2진 데이터를 저장
- 저장된 데이터는 전원이 공급되는 한 유지
레지스터
- 플립플롭의 데이터 저장 기능을 이용하여 만든 작은 용량의 메모리
- 컴퓨터 연산장치에서 데이터의 임시 저장에 사용
- 데이터를 직렬 또는 병렬로 변환할 때 사용
연산이나 데이터 전송 및 변환을 위하여 데이터를 오른쪽이나 왼쪽으로 쉬프트(Shift)->쉬프트 레지스터
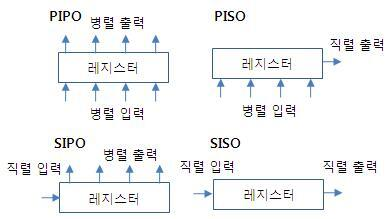
데이터의 입력과 출력 방법에 따라 종류를 나누며
SISO(Serial Sn Serial Sut)
PISO(Parallel In Seral Out)
SIPO(Serial In Parallel Out)
PIPO(Parallel In Parallel Out)
SISO 쉬프트 레지스터
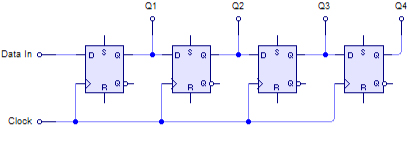
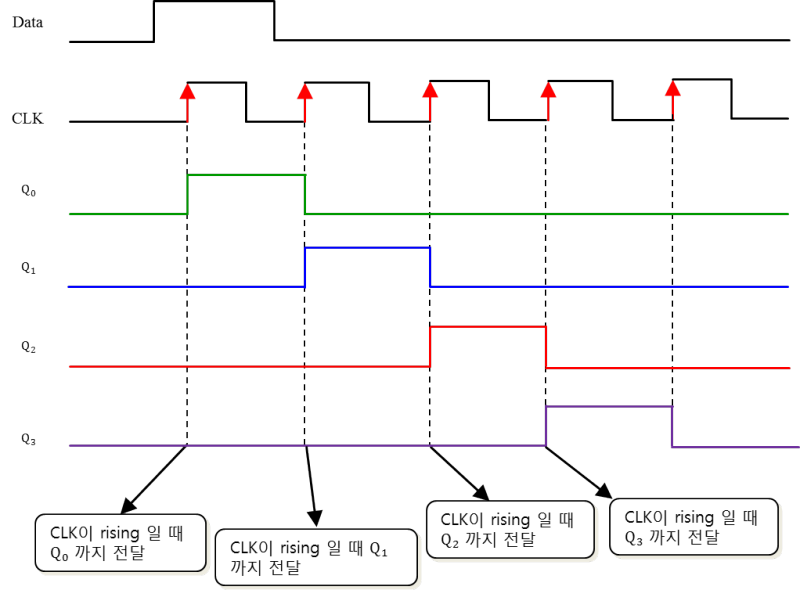
데이터 1001
회로
결과
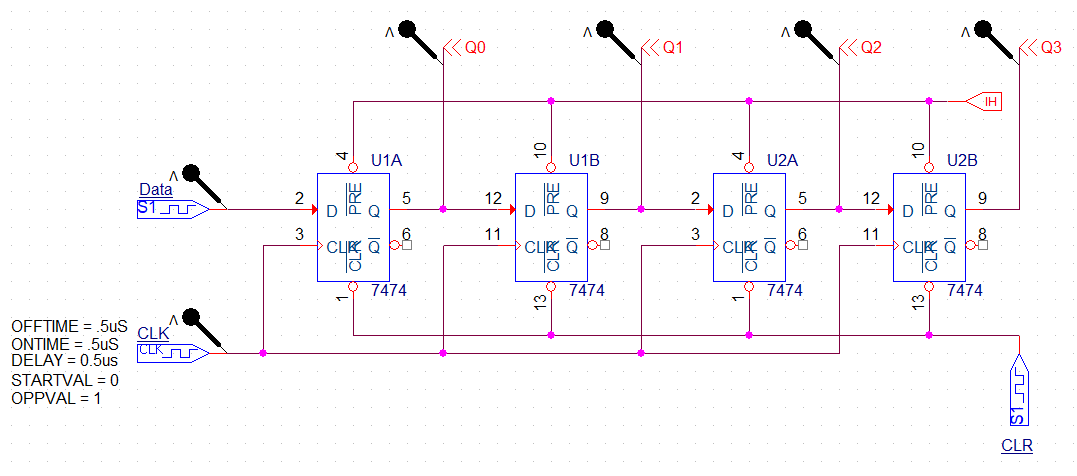
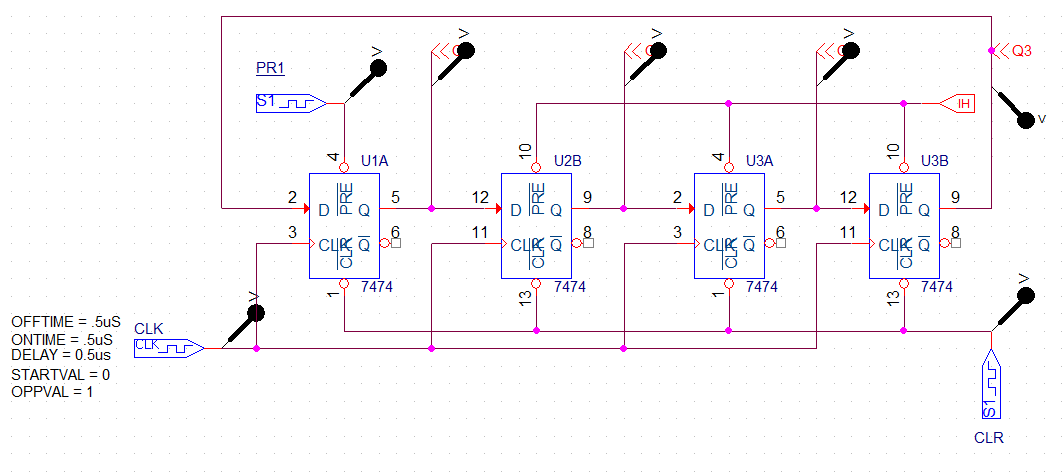
링카운터
회로
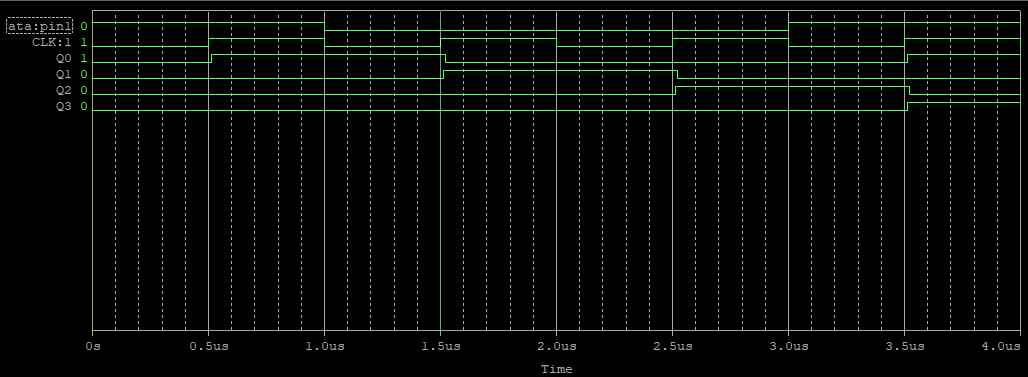
결과
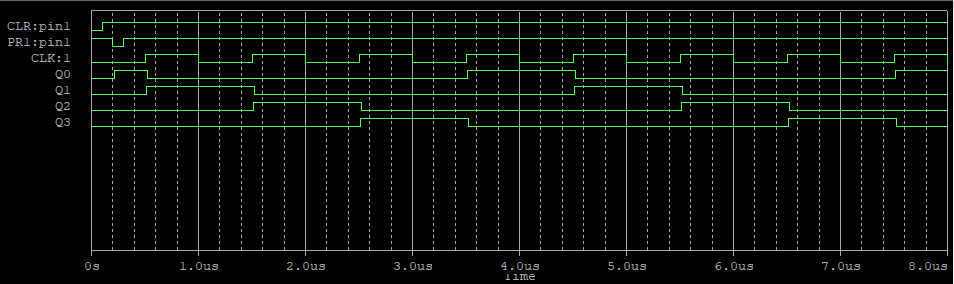
PR1을 통해 Q0만 1로 주고 그이후 클럭에 따라 쉬프트 레지스터처럼 동작하고 Q3값을 다시 Q0가 읽는다, 링 카운터의 Q0는 다음 상승엣지일때 피드백에의해 Q3의 값을 읽는다
