클락으로 나눴을 경우
I2C, SPI 클락이 있는 동기 통신
UART 비동기 통신, USART는 Synchro; 동기 통신
전이중, 반이중 방식으로 나눴을 경우
1:1, 1:N 방식으로 나눴을 경우
USART
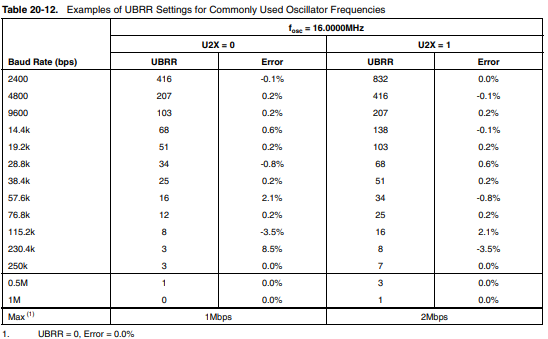
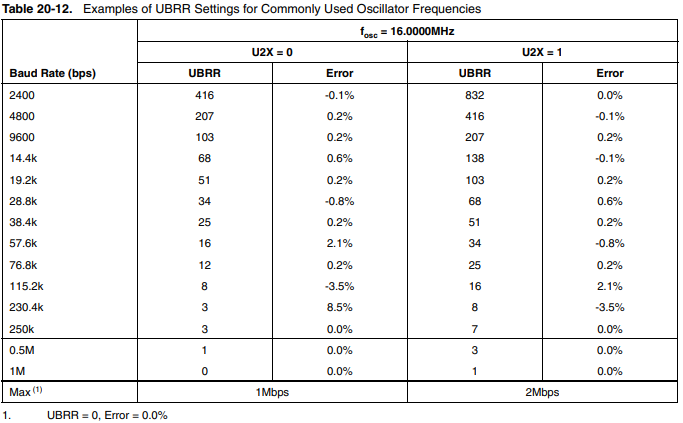
데이터 시트 20 또는 25


#define F_CPU 16000000UL
#include <avr/io.h>
#include <util/delay.h>
void UART0_Init();
void UART0_Transmit(char data);
unsigned UART0_Recevie();
int main(void)
{
UART0_Init();
while (1)
{
UART0_Transmit(UART0_Recevie());
}
}
//9600 bps 설정
//2배속 모드
//비동기, 8비트 데이터, 패리티비트 없음, 스톱비트 1bit
void UART0_Init()
{
UBRR0H = 0;
UBRR0L = 207; //9600bps
UCSR0A |= (1<<U2X0); //2배속
//UCSR0C |= 0x06; //비동기, 8비트 데이터, 패리티비트 없음, 스톱비트 1bit
//기본 세팅값이 0000_0110임
UCSR0B |= (1<<RXEN0); //수신 가능
UCSR0B |= (1<<TXEN0); //송신 가능
}
void UART0_Transmit(char data)
{
while(!(UCSR0A & (1<<UDRE0))); //송신가능?, UDR 비어있는지?, 비어있으면 1로 됨 !연산을 통해 while 빠져나옴
UDR0 = data;
}
unsigned UART0_Recevie()
{
while(!(UCSR0A & (1<<RXC0))); //수신대기
return UDR0;
}
led 켜기
#include "uart0.h"
int main(void)
{
DDRB = 0xff;
PORTB = 0x00;
UART0_Init();
while (1)
{
//UART0_Transmit(UART0_Recevie());
//char led = UART0_Recevie();
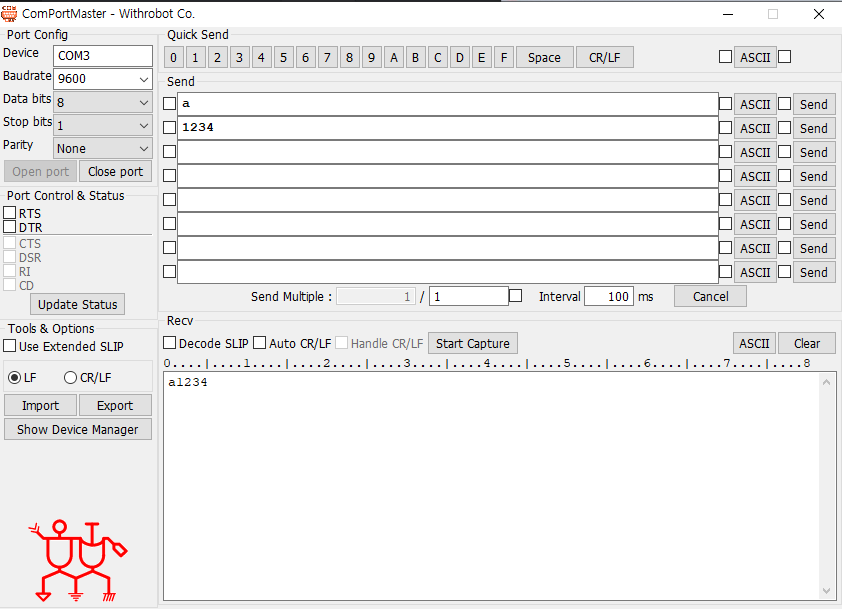
if (UART0_Recevie() == 'a')
{
PORTB = 0xff;
}
else if (UART0_Recevie() == 'b')
{
PORTB = 0x00;
}
}
}문자 'a'를 보내면 led 켜짐, 문자 'b를 보내면 led 꺼짐
인터럽트

main.c
#include "uart0.h"
//출력 스트림 <stdio.h>안에있음, 표준
FILE OUTPUT = FDEV_SETUP_STREAM(UART0_Transmit, NULL, _FDEV_SETUP_WRITE);
char rxBuff[100] = {0}; //수신버퍼, 초기화
uint8_t rxFlag = 0; //수신 완료 플래그
ISR(USART0_RX_vect) //Rx 인터럽트가 발생되면 ISR함수 호출
{
static uint8_t rxHead = 0; //수신된 데이터 인텍스
uint8_t rxData = UDR0;
if(rxData == '\n' || rxData == '\r') //수신데이터가 개행, 리턴이면
{
rxBuff[rxHead] = '\0'; //널 추가
rxHead = 0;
rxFlag = 1;
}
else
{
rxBuff[rxHead] = rxData;
rxHead++;
}
}
int main(void)
{
UART0_Init();
uint8_t rxData;
stdout = &OUTPUT;
sei();
while (1)
{
if(rxFlag == 1)
{
rxFlag = 0;
printf(rxBuff);
}
}
}uart0.c
#include "uart0.h"
//9600 bps 설정
//2배속 모드
//비동기, 8비트 데이터, 패리티비트 없음, 스톱비트 1bit
//수신 인터럽트 활성화
void UART0_Init()
{
UBRR0H = 0;
UBRR0L = 207; //9600bps
UCSR0A |= (1<<U2X0); //2배속
//UCSR0C |= 0x06; //비동기, 8비트 데이터, 패리티비트 없음, 스톱비트 1bit
//기본 세팅값이 0000_0110임
UCSR0B |= (1<<RXEN0); //수신 가능
UCSR0B |= (1<<TXEN0); //송신 가능
UCSR0B |= (1<<RXCIE0); //수신 인터럽트 활성화
}
void UART0_Transmit(char data)
{
while(!(UCSR0A & (1<<UDRE0))); //송신가능?, UDR 비어있는지?, 비어있으면 1로 됨 !연산을 통해 while 빠져나옴
UDR0 = data;
}
unsigned UART0_Recevie()
{
while(!(UCSR0A & (1<<RXC0))); //수신대기
return UDR0;
}uart0.h
#ifndef UART0_H_
#define UART0_H_
#define F_CPU 16000000UL
#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h>
#include <stdio.h>
void UART0_Init();
void UART0_Transmit(char data);
unsigned UART0_Recevie();
#endif /* UART0_H_ */초음파
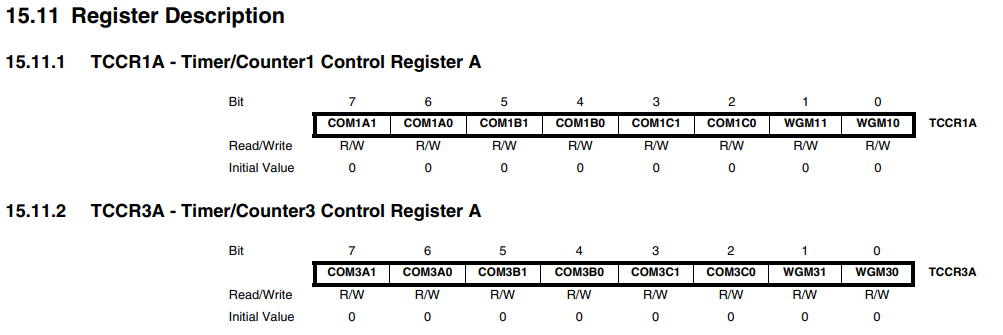
타이머 카운터 레지스터
main.c
#include "uart0.h"
FILE OUTPUT = FDEV_SETUP_STREAM(UART0_Transmit, NULL, _FDEV_SETUP_WRITE);
void timerInit()
{
TCCR1B |= (1<<CS12) | (1<<CS10); //16비트 타이머 1번, 분주비 1024설정
}
void triggerPin()
{
PORTD &= ~(1<<PORTD1); //LOW
_delay_us(1);
PORTD |= (1<<PORTD1); //HIGH
_delay_us(10);
PORTD &= ~(1<<PORTD1); //LOW
}
uint8_t meanDistance() //거리측정
{
TCNT1 = 0;
while(!(PIND & 0x01)) //echo pin이 HIGH까지 대기
{
if(TCNT1 > 65000)
{
return;
}
}
TCNT1 = 0;
while(PIND & 0x01) //echo pin이 LOW까지 대기
{
if(TCNT1 > 65000)
{
TCNT1 = 0;
break;
}
}
double pluseWidth = 1000000.0 * TCNT1 * 1024 / 16000000;
// TCNT1의 값이 us단위임, us를 s단위로 바꿔주기 위해 1000000.0 곱함
// 거리 = 시간 * 속도 (속도 : 340m/sec)
return pluseWidth / 58;
}
int main(void)
{
uint8_t distance;
stdout = &OUTPUT;
UART0_Init();
sei();
DDRD |= 0x02;
DDRD &= 0xfe;
timerInit();
while (1)
{
triggerPin();
distance = meanDistance();
printf("Distance : %d cm\r\n", distance);
_delay_ms(1000);
}
}uart0.c
#include "uart0.h"
//9600 bps 설정
//2배속 모드
//비동기, 8비트 데이터, 패리티비트 없음, 스톱비트 1bit
//수신 인터럽트 활성화
void UART0_Init()
{
UBRR0H = 0;
UBRR0L = 207; //9600bps
UCSR0A |= (1<<U2X0); //2배속
//UCSR0C |= 0x06; //비동기, 8비트 데이터, 패리티비트 없음, 스톱비트 1bit
//기본 세팅값이 0000_0110임
UCSR0B |= (1<<RXEN0); //수신 가능
UCSR0B |= (1<<TXEN0); //송신 가능
UCSR0B |= (1<<RXCIE0); //수신 인터럽트 활성화
}
void UART0_Transmit(char data)
{
while(!(UCSR0A & (1<<UDRE0))); //송신가능?, UDR 비어있는지?, 비어있으면 1로 됨 !연산을 통해 while 빠져나옴
UDR0 = data;
}
unsigned UART0_Recevie()
{
while(!(UCSR0A & (1<<RXC0))); //수신대기
return UDR0;
}uart0.h
#ifndef UART0_H_
#define UART0_H_
#define F_CPU 16000000UL
#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h>
#include <stdio.h>
void UART0_Init();
void UART0_Transmit(char data);
unsigned UART0_Recevie();
#endif /* UART0_H_ */LCD에 초음파 거리 표시
#include "uart0.h"
#include "sonic.h"
#include "I2C.h"
#include "I2C_LCD.h"
FILE OUTPUT = FDEV_SETUP_STREAM(UART0_Transmit, NULL, _FDEV_SETUP_WRITE);
int main(void)
{
uint8_t distance;
stdout = &OUTPUT;
UART0_Init();
sei();
DDRD |= 0x08;
DDRD &= 0xef;
timerInit();
uint8_t buff[30];
LCD_Init();
LCD_WriteStringXY(0,0,"Hello ATmega128a");
while (1)
{
triggerPin();
distance = meanDistance();
sprintf(buff, "distance : %-5d", distance);
LCD_WriteStringXY(1,0,buff);
_delay_ms(1000);
}
}필요한 헤더파일

개인 기록공간