교육 - ATmega128A, STM32
1.5/28 타이머/카운터
데이터시트 14.11 register description
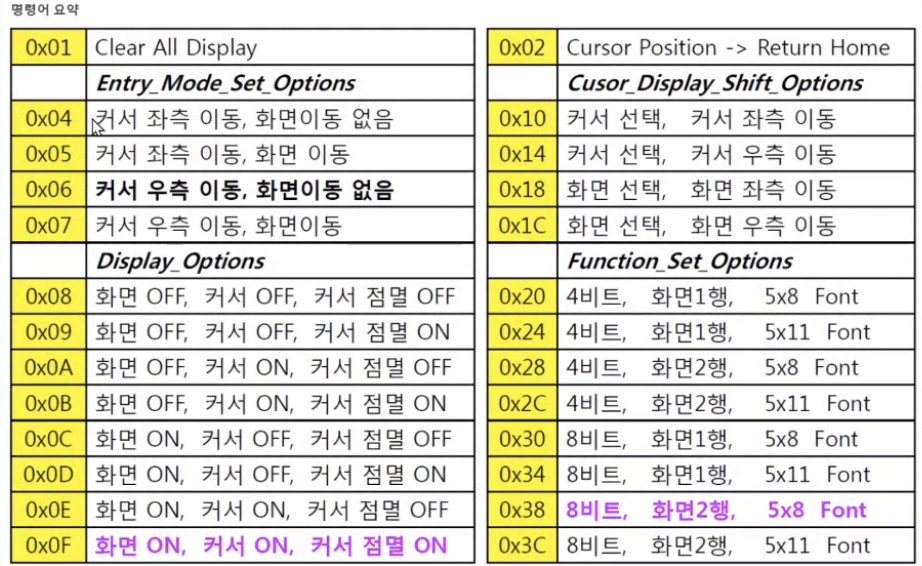
2.9/10 LCD
cpu구조RISC-5CISCRISCAMBAAXI4APBAHBASB
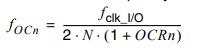
3.9/11 USART
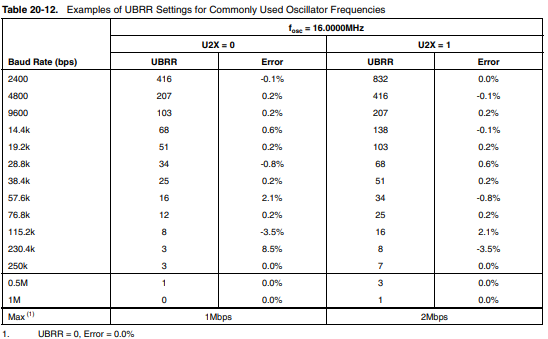
클락으로 나눴을 경우I2C, SPI 클락이 있는 동기 통신UART 비동기 통신, USART는 Synchro; 동기 통신전이중, 반이중 방식으로 나눴을 경우1:1, 1:N 방식으로 나눴을 경우데이터 시트 20 또는 25
4.9/12 STM32 - led, usart
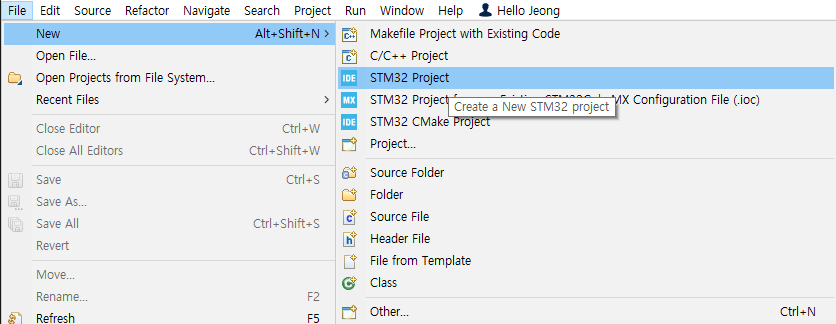
원하는 workspace 설정 가능상단 help옆에 로그인 하고 시작commercial part number에 검색next이름정하고 finish왼쪽에 초록새으로 바뀜serial wireclock configrationproject manager저장기존에 있는거에서 덧붙
5.9/13 STM32 파일 나누기, led, nonblocking, button, timer
완전히 새로운 프로젝트 생성하였다.RCC 하이스피드클락 설정SYS 디버그 설정기본적인 세팅제너레이션프로젝트 속성ADD Folderapp폴더에 C라는 문자가 담김Workspaceapp선택추가또다른 방법들어가있음hw폴더도 마찬가지저장해야 다른 곳에서 참조 가능hw.c
6.9/23 PWM-서보모터, 부저, ADC
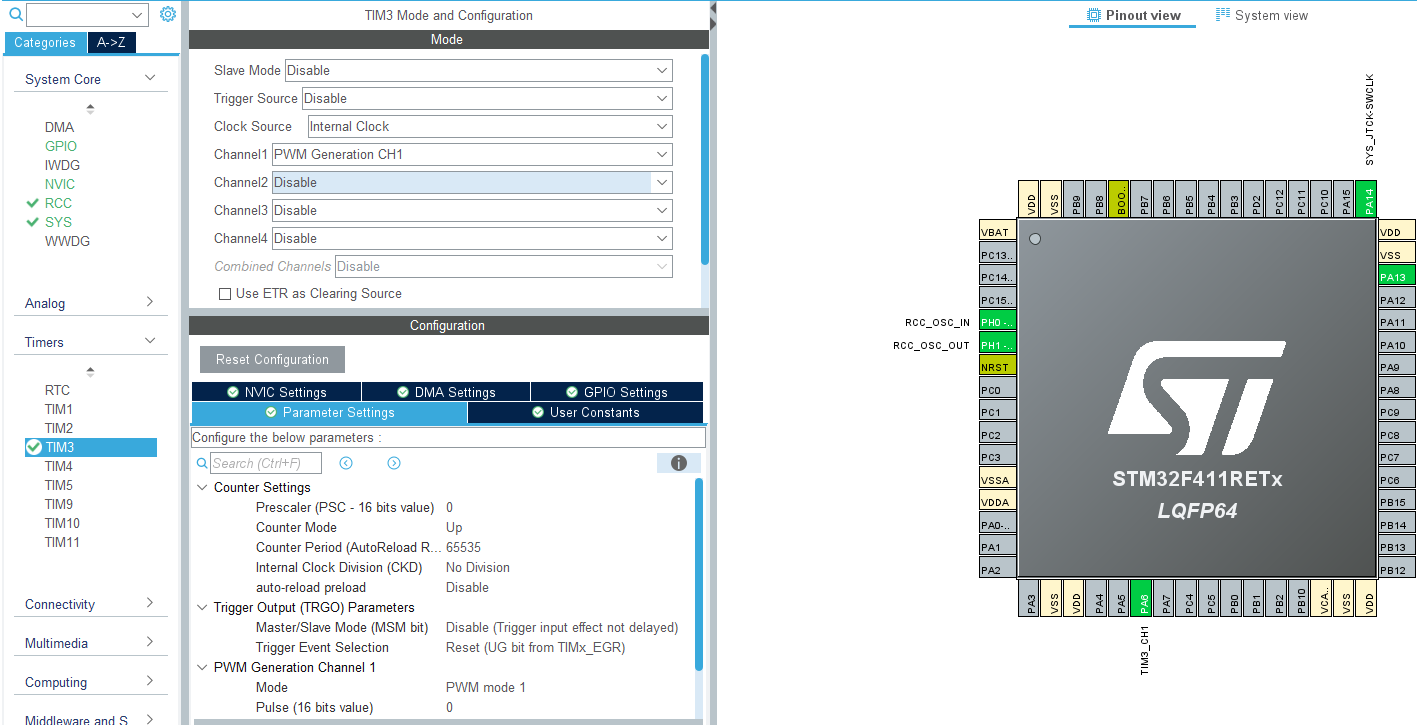
기본 설정분주Pulse값으로 듀티값 설정main안에 추가CCR이 듀티값처음 설정대로 듀티값이 500이였다가 while문안에서 for문의 i에 의해 0부터 1000까지 늘어나면서 반복
7.9/24 조이스틱, 초음파, LCD
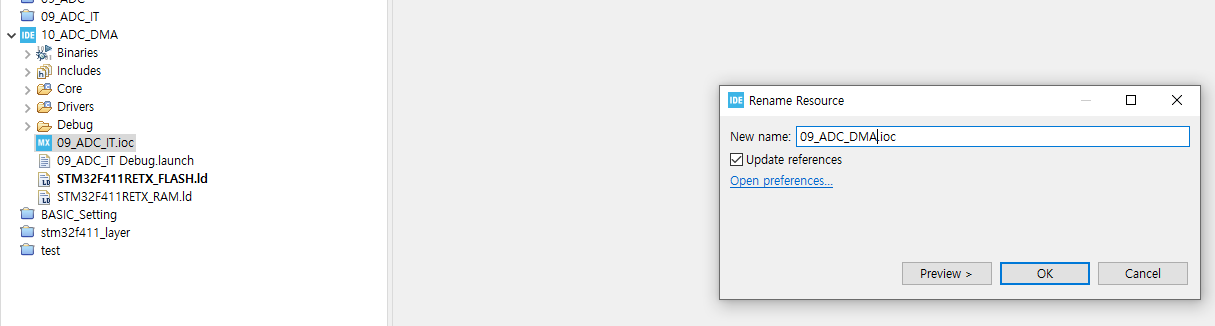
09번 프로젝트를 복사해서 붙여넣은 다음 이름을 다른것으로 바꿔준다프로젝트에서 클린 프로젝트 -> 빌드 프로젝트 (이름 다른 디버그 파일은 삭제함)업로드중..ADD 누른뒤 설정(Normal 아니고 Circular)(Normal은 한번만 받아오고 Circular는 반복해
8.9/27 RTOS (Real Time OS)
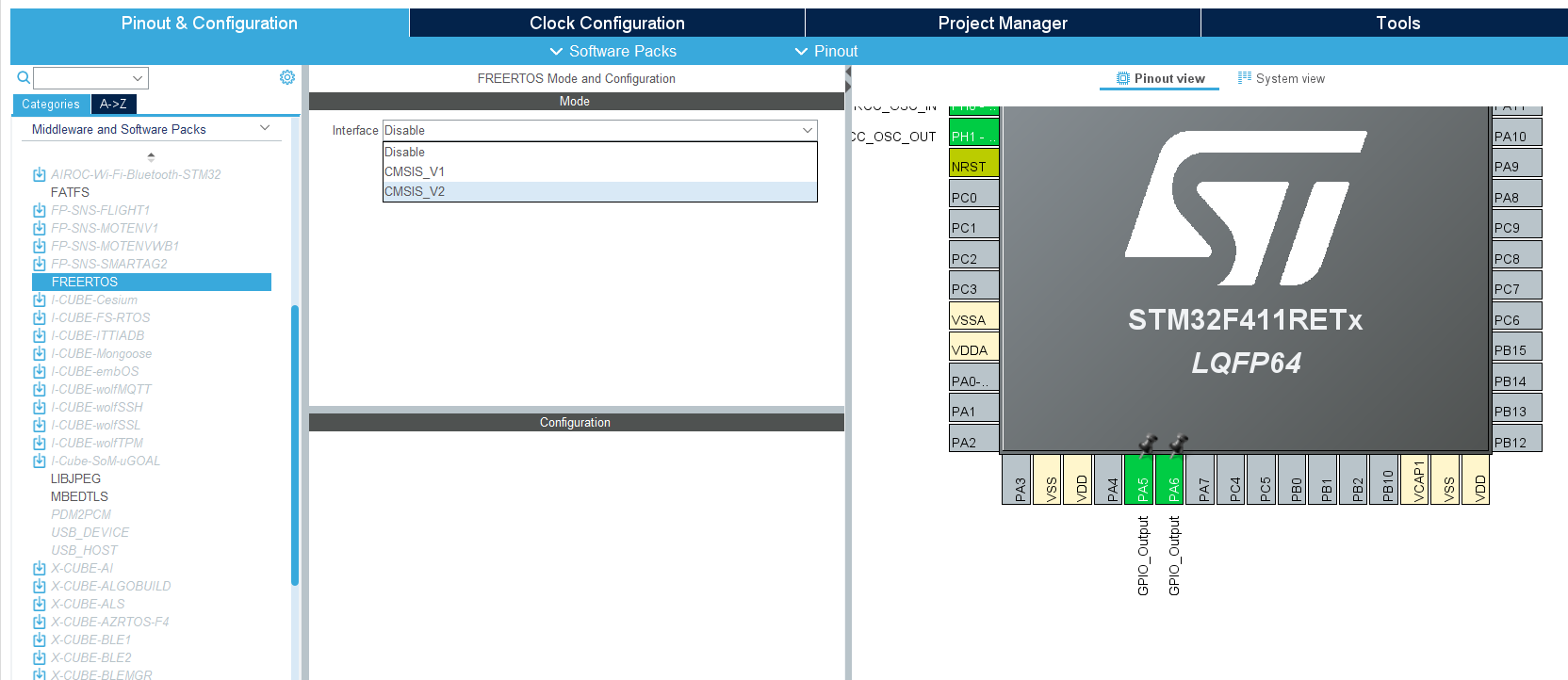
\-주어진 시간대로 처리하는 것이 중요\-순서대로General OS (일반적인 os 예:윈도우 -효율성이 필요) vs RTOS(효율성 따지지 않음)Hard RTOS(주어진 시간안에 반드시 처리해야함 예:군사장비) vs Soft RTOS(시간안에 처리하면 좋음 안되면 어
9.9/30 RC car
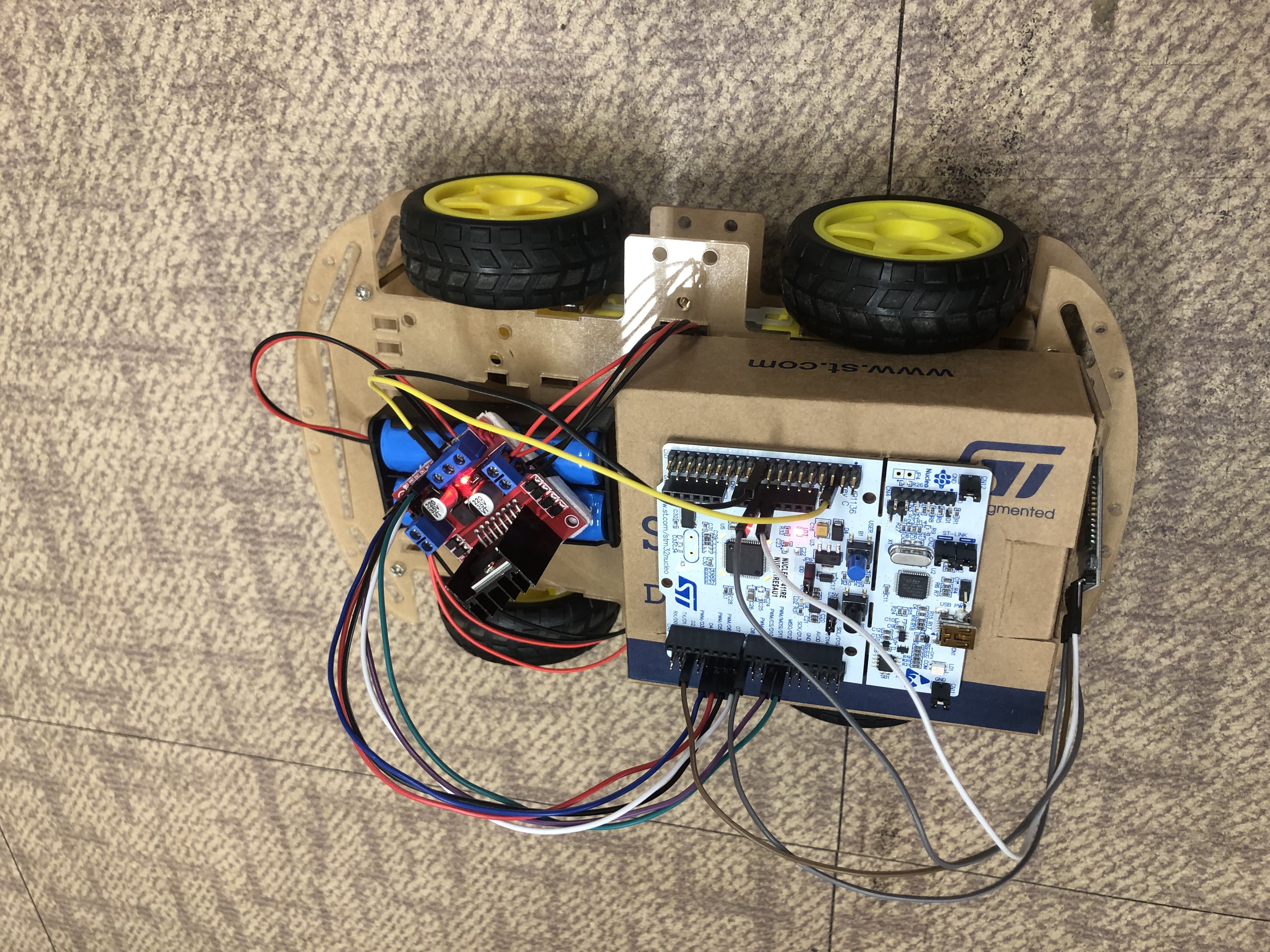
조이스틱을 이용한 RC car 만들기 RC car 코드 조이스틱 코드