
Edge detection
- 목표: 함축적인 정보, 정보를 알기 쉬워짐
Edge
- surface normal discontinuity: 노멀 벡터가 급격히 변해서
- depth discontinuity: 급격히 차이나는 깊이 (카메라와의 거리)
- surface color discontinuity: 색이 달라서
- illumination discontinuity: 빛의 정도 (ex-그림자)
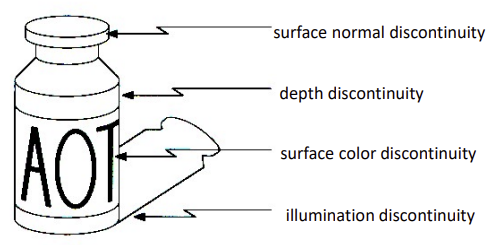
- 공통적으로, 보통 색/밝기 가 달라서 체크되는 edge
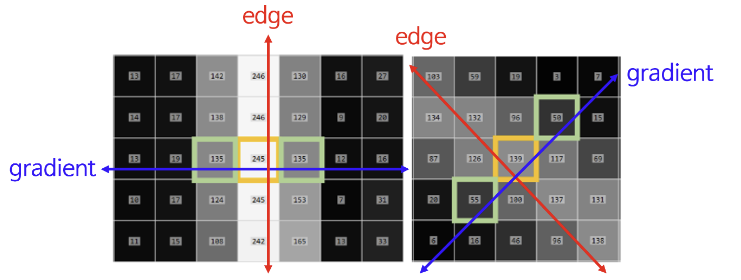
- edge는 밝기가 급격히 변하는 부분이다.
-> 이미지 intensity 함수에서 rapid change 부분 - 급격히 변하는 곳을 알기 위해 미분 -> extrema(극값)가 edge일 가능성이 높다
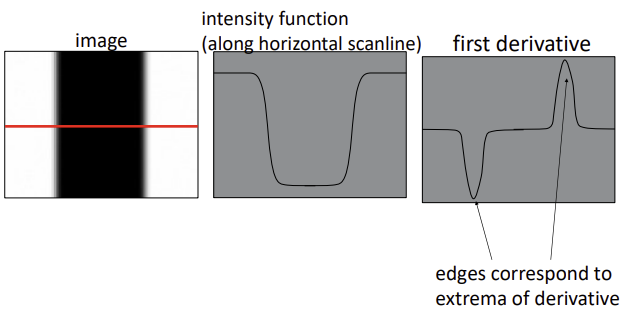 (가로축은 gradient 방향, edge의 수직인 방향)
(가로축은 gradient 방향, edge의 수직인 방향)
Effects of noise
- 노이즈가 있는 상태에서 미분하면, 밝기 차이로 인해 노이즈의 미분값도 크게 나와 edge와 헷갈림
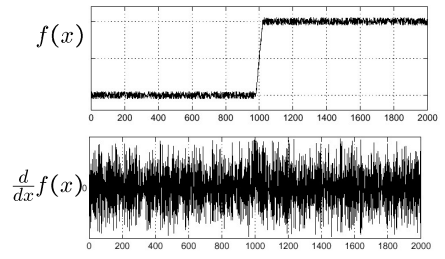
- 노이즈를 없애기 위해 low-pass filter 적용
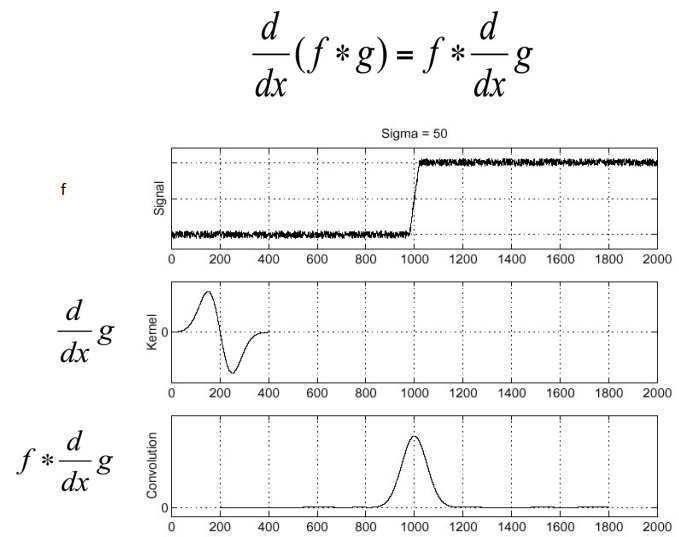
- Gaussian filter 적용한 뒤 미분
-> 극값에 해당하는 곳이 edge
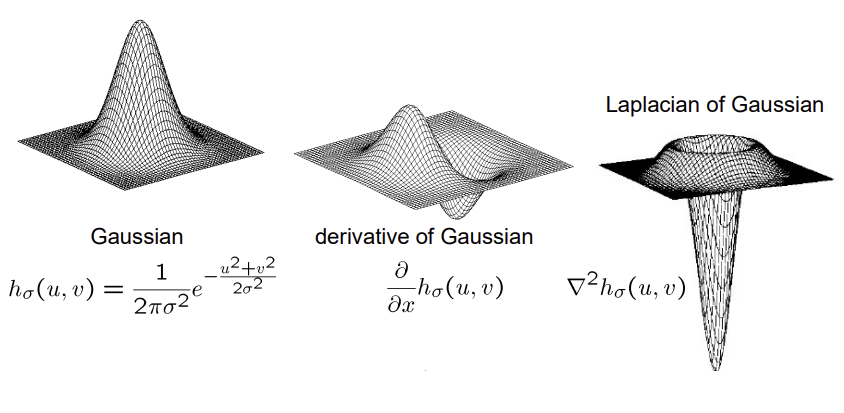
- Gaussian을 미분한 뒤, f와 Convolution해도 결과는 비슷 (linear하기 때문)
- Gaussian을 두 번 미분한 뒤(Laplacian) 이미지와 Convolution (Laplacian of Gaussian)(= (=Gaussian filter를 적용한 이미지를 두 번 미분)
-> zero-crossing하는 곳이 edge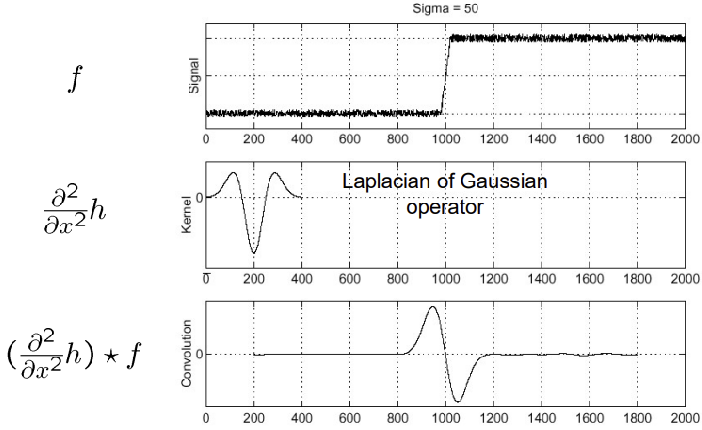
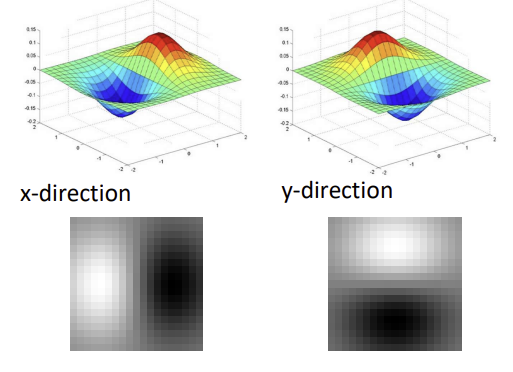
2D edge detection filters
- Gaussian 한 번 미분 / Laplacian of Gaussian
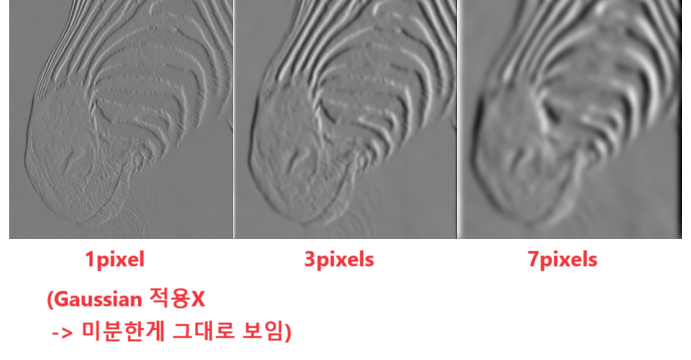
Gaussian의 sigma
σ가 클수록 범위가 커짐 (블러가 많이 됨)σ를 픽셀 단위로 생각할 때, 아래 그림을 보면 Edge는σ정도에 따라 다르게 나오며 값이 낮을 수록 미세한 값까지 나타난다는 것을 알 수 있다- noise(edge로 보지 않을 것)와 signal(edge로 볼 것)의 정도를 정하는 역할!
Gradient
- x축 미분, y축 미분 (벡터로 합침)
- Gradient magnitude(길이): 밝아지는 정도
(클수록 급격히 밝아짐 -> edge)
-> 근데 두꺼운 edge로 나타나고 이어진 edge인지 판별이 어려움
- Gradient direction(방향): 밝아지는 방향

두꺼운 edge의 이유
1. 원래 사진이 뿌옇다
2. Edge가 애매
3. Gaussian
Edge detector
- edge가 연결된 구체적 범위 제안
- 두꺼운 edge 중 실제 이미지의 선과 비슷한 한 가닥 edge를 찾아냄 (Localization)
Canny edge detector
- Gaussian 노이즈에 강한 edge detector
- 현재까지도 가장 많이 사용되는 edge detector
- 5단계로 구성
-
Gaussian 미분한 걸로 filtering
-
Gradient 계산 (x, y방향으로 미분된 Gaussian Convolution)
-> edge의 magnitude와 direction 얻음
-> 두꺼운 edge
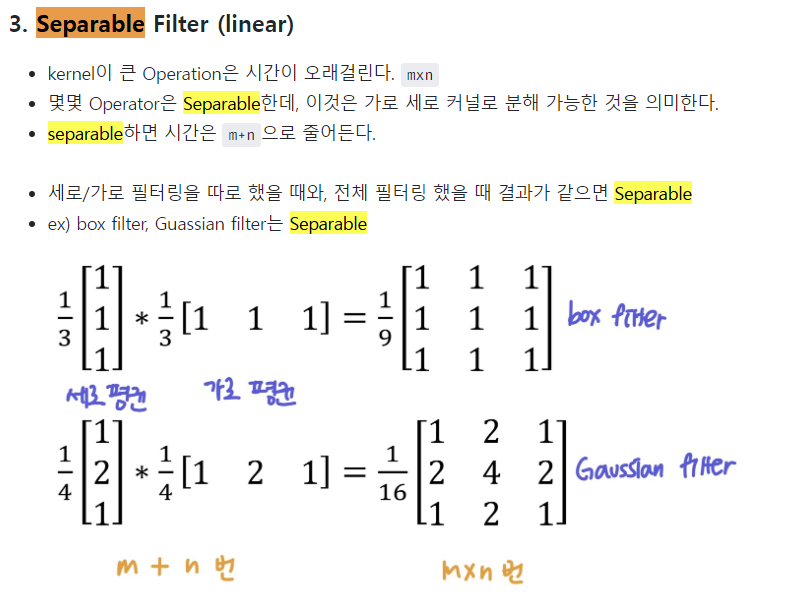
- Gaussian은 separable한 filter
- x축으로 filtering + y축 filtering = box convolution
- 장점⭐: kernel의 크기가
mxm이면이미지크기xmxm의 complexity인데, separable하게 계산하면이미지크기xmx2가 되므로 complexity가 줄어듦 - 위에서 Gaussian 미분하고 filtering하는 것보다, seperable하게 filtering한 뒤 미분하는게 더 빠름
- Gaussian은 separable한 filter
-
Non-maximum supperssion
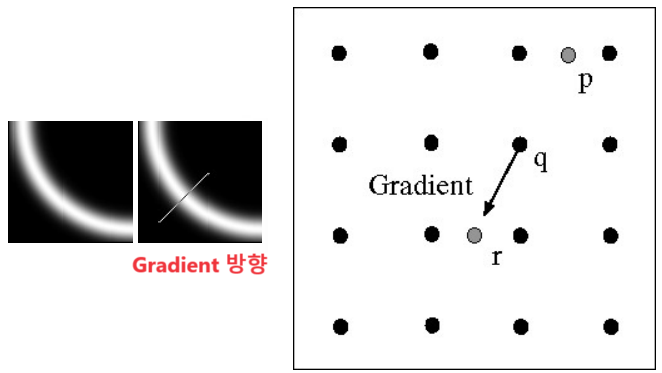
- gradient 방향을 고려해서 1pixel의 edge 구하기
- 두꺼운 edge에서 진짜 선을 찾아내기 (Maximum이 아닌거는 눌러버린다)
-> 하나의 edge가 여러 개의 픽셀로 표현되는 현상 없애기 - 두꺼운 Edge에서 Edge방향의 수직방향은 선이 두껍게 퍼저가나는 방향 즉, Gradient의 방향을 나타낸다.
- Edge의 수직 방향 = Gradient의 방향
- Gradient의 수직 방향 = Edge 방향
- Gradient 방향에 위치한 픽셀들을 조사하여 Gradient의 크기가 local maximum인 픽셀만을 edge로 설정하고 나머지는 0으로 설정
- Edge와 Gradient가 직교이고, Gradient방향으로 NMS를 적용하기 때문에 단일 edge를 선택할 수 있는 것
- Magnitude가 남아있는 상태
- 보간????????????????????이 어디에..
gradient방향에서는 maximum만 찾고(연결X), edge의 방향으로 연결 -> maximum들은 edge의 방향대로 모여있음
- Edge linking
- NMS 과정에서 Edge가 끊어지는 것 보완
- NMS에서 선정된 Maximum pixel에서 edge 방향을 찾고(수직), 다음 edge pixel(
r또는s)을 추측한다(NMS).
(큰 값을 찾고 따라가는 방식을 반복)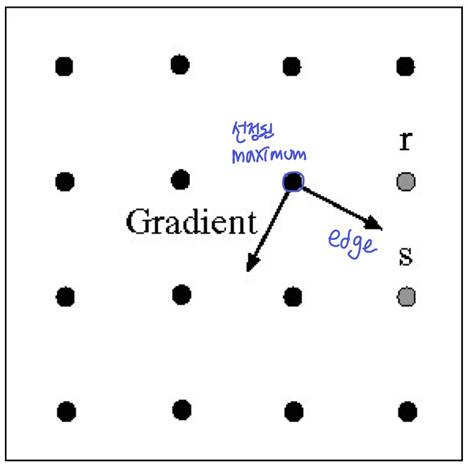
4번의 gradient의 방향으로 움직이면서 3번의 NMS 진행 -> 한 pixel의 선을 그릴 수 있게됨
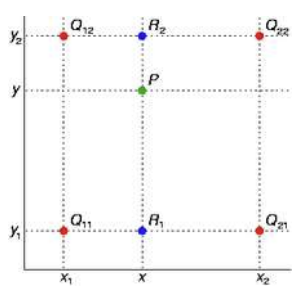
+) Bilinear Interpolation
- 점 P의 밝기 찾기
- 점 R값 찾기
- R1 = (1-x)Q11 + xQ21
- R1 = (1-x)Q12 + xQ22
- 점 P값 찾기
- P = yR1 + (1-y)R2
- x, y 순서 상관 없음

+) Interpolation options
- 각 이미지의 점에 color가 주어진 경우 Interpolation 방법들
- nearest(neighbor)
- 가장 가까운 점의 값 가져오기
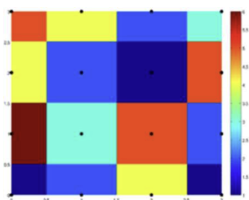
- 가장 가까운 점의 값 가져오기
- bilinear
- 점과 점에 선을 그어서 비율에 따라 구하기 (2x2= 4)
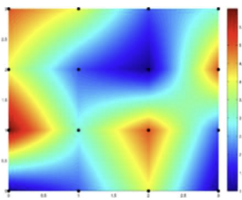
- 점과 점에 선을 그어서 비율에 따라 구하기 (2x2= 4)
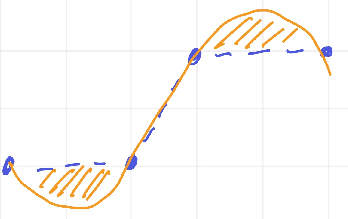
- bicubic
- 점 4개로 3차함수를 만들어서 구하기 (4x4=16)
- 3차 함수를 그리면서 원래 값보다 크거나 작은 값이 나타나는 Overshooting 문제가 edge 근처에 생길 수 있다.
-
Hysteresis thresholding
- NMS 후, gradient magnitude가 남아있는 상태이고,
- Edge인지 아닌지 판별하기 위해 특정 값 이상만 살리도록 함(thresholding값을 정하고 못넘으면 0으로) -> 그 중 Hysteresis thresholding 사용
- NMS 후, 3종류로 구분
- 너무 작아서 Edge 가능성 작은 픽셀 -> 삭제
- 너무 커서 Edge 가능성이 큰 픽셀 -> 유지
- 중간값의 픽셀-> 고민
- 3번과 2번이 연결되어있다면, 3번을 살릴 가능성이 크다.
- gradient value의 maximum 값을 확인하여 시작 edge에서는 높은 threshold, 이어지는 edge에는 낮은 threshold
- 고민되는 edge가 확실한 edge와 붙어있다면 살리고, 붙어있지 못한 고민되는 edge는 삭제됨
- 선택된 edge에서 다음 edge픽셀을 찾는 법: gradient의 방향을 알고 있으므로 -> edge방향 알아냄 -> edge방향으로 갔을 때 근처에 있는 한 점 중
dge로 선택된 픽셀또는고민되는 edge가 있다면 그 방향으로 이어감 (없다면 멈춤)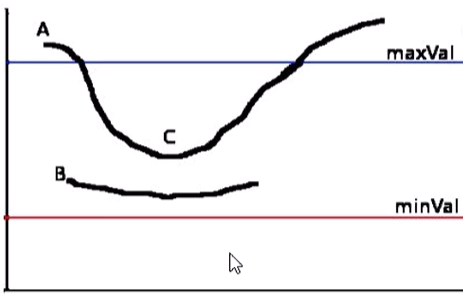 (위 이미지에서 C는 살고, B는 죽음)
(위 이미지에서 C는 살고, B는 죽음)
- 선택된 edge에서 다음 edge픽셀을 찾는 법: gradient의 방향을 알고 있으므로 -> edge방향 알아냄 -> edge방향으로 갔을 때 근처에 있는 한 점 중
algorithm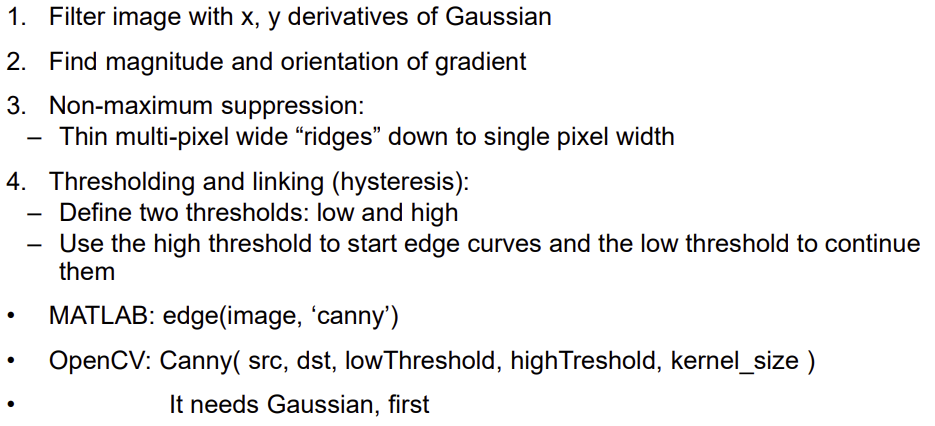
Effect of σ (Gaussian Kernel spread/size) ⭐
- 위에도 나온 이야기이지만 Gaussian의
σ값은 중요하다 σ가 크면: detect large scale edges (대략적인 edge)σ가 작으면: detects fine features (세부적인 edge까지)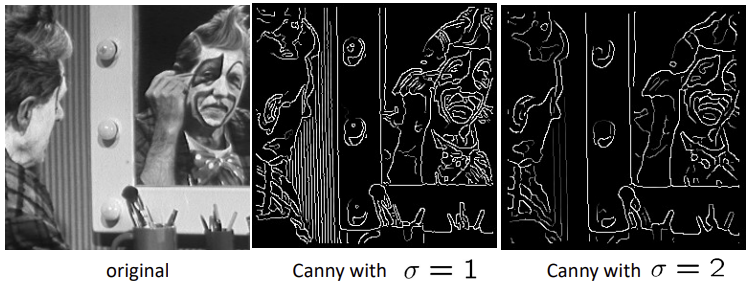
Lines
- edge는 line이 아니다
- 직선을 알게되면 방정식으로 나타내는 등 사용 방법이 늘어나므로 line을 찾는 것은 중요
representation lines
- y = mx + b
- y축과 평행한 직선을 표현할 수X (m이 무한대)
- ax + by + c = 0
- homogeneous로 나타내면

- a, b, c ()에 의해 표현된 Line
- 하나의 직선을 나타낼 수 있는 a, b, c 조합이 많다. 3개의 자유도는 많다. (상수배해도 동일한 직선이므로)
(a, b, c가 homogenouse 하다)
- homogeneous로 나타내면
- normalization:

- a, b의 길이를 1로 만든
n과 그때의d로 line 표현 - 자유도는 2개(θ, d)
-> unique하고 complete (한 직선에 대한 한 쌍의 (θ, d)만 나오고, 모든 line을 표현 가능)
- a, b의 길이를 1로 만든
(θ, d)로 표현한 line
- 원점에서 θ만큼 꺾이고 거리가 d인 벡터의 수직인 직선
-> xcosθ + ysinθ = d를 만족하는 직선
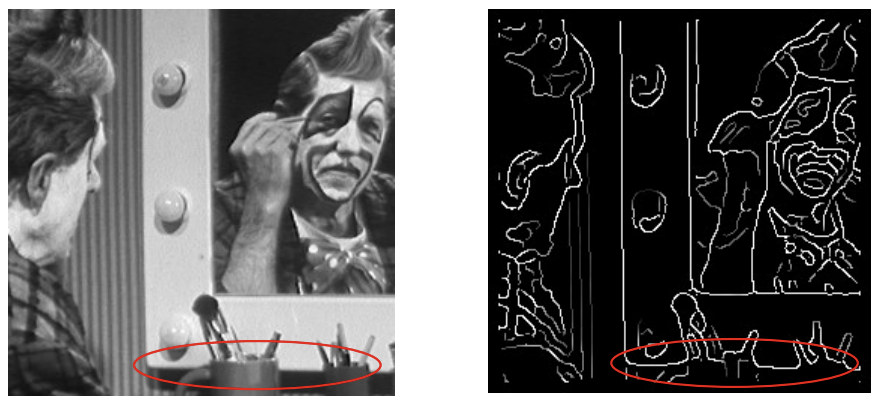
Finding lines in an image
- 한 밝은 점 주변에서 자신과 동일한 기울기를 가지는 점과 직선이라고 인식 -> 더 이상 주변에 동일한 기울기의 점이 없을 때까지 반복
- 이미지 상에 가능한 모든 위치/방향에서의 line을 그리고 일치하는 line을 찾기 -> 힘드므로 Hough transform이라는 방법으로 직선을 찾는다.
Hough transform
- 노란 선들과 대각선의 교점 -> 어떤 line의 점일까?
- 해당 점은 노란 선 2개와 대각선 (총 3개)의 라인에 해당하는 점이다. -> 점마다 해당할 수 있는 Line이 한정적이므로, 점에 해당할 수 있는 후보 line들 중 해당하는 line에 투표
- 모든 점에 대해 투표를 반복한 뒤, 가장 많은 투표를 받은 line이 line이다.
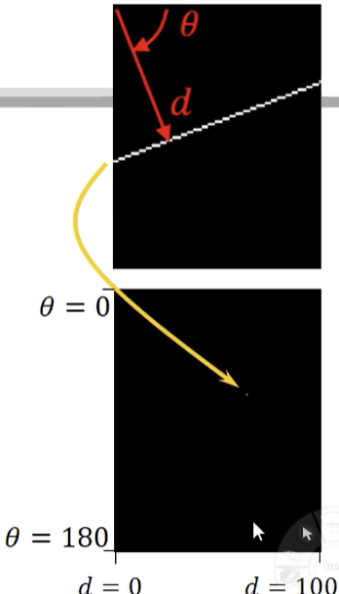
Hough space
- θ와 d가 세로, 가로축인 table
- 픽셀들이 자신이 해당하는 line의 θ와 d으로 table에 해당하는 점을 투표
- hough space에서 한 점 -> 실제 이미지에서의 한 점
- 이미지의 한 점을 지나는 무수히 많은 직선들을 hough space에 나타내면 아래처럼 나타난다
- 각 직선은 hough space에 점을 찍고, 무수히 많은 직선들은 hough space에 무수히 많은 점을 찍어 곡선을 만든다
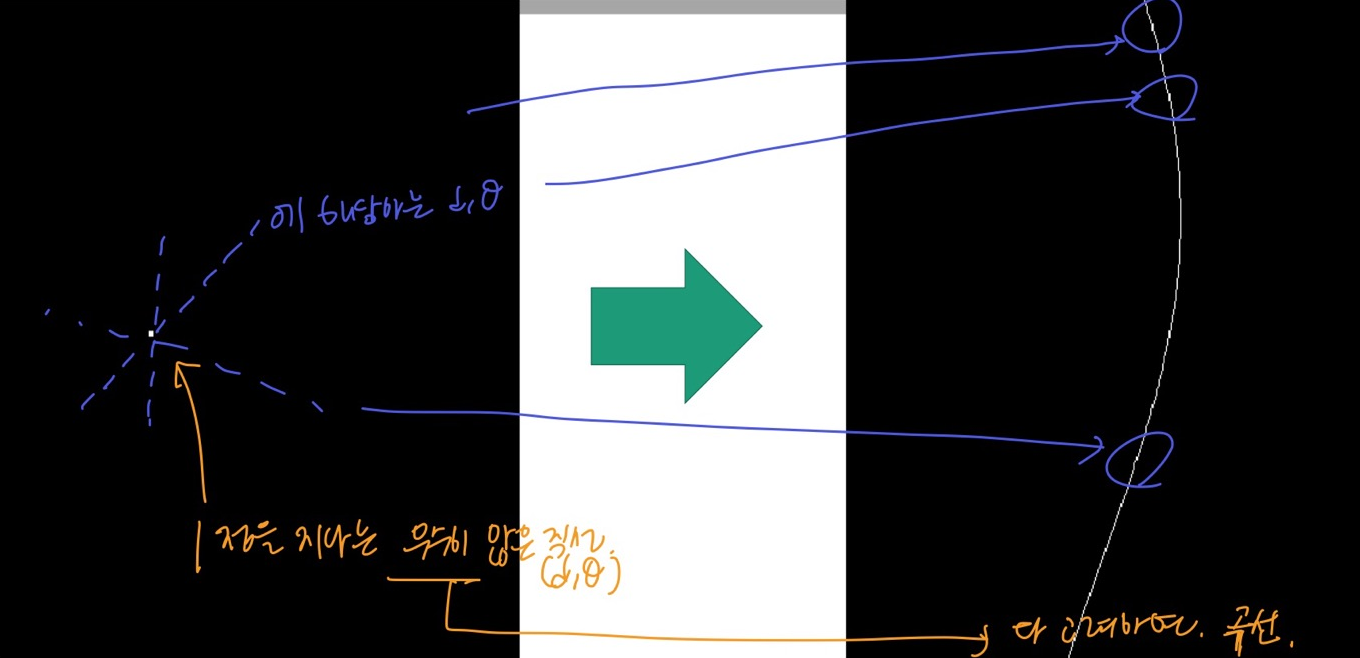
- 각 직선은 hough space에 점을 찍고, 무수히 많은 직선들은 hough space에 무수히 많은 점을 찍어 곡선을 만든다
- 점이 두 개라면?
- hough space에서 두 곡선이 생기고 두 곡선의 교점이 생긴다. (2표를 받은 점)
- hough space에서 만다는 점은 두 점을 지나는 직선의 점이다.

algorithm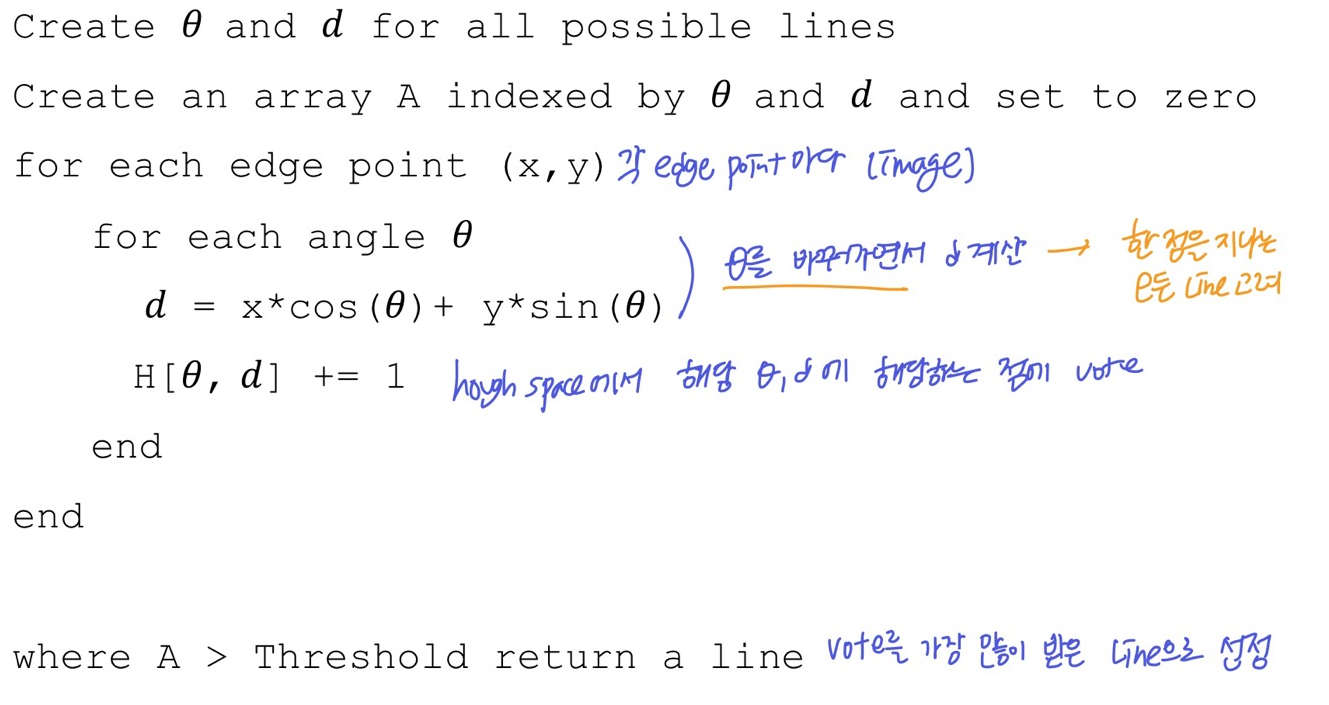
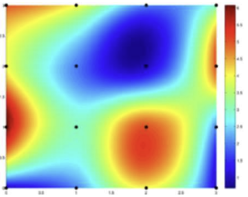
example
- hough space에서 파란 부분은 vote 0, 붉을수록 vote 수가 많다 (edge에 해당하는 점)
- 붉은 point의 θ와 d값으로 image 상에서의 line의 방정식을 찾을 수 있다
(교수님이 가로선과 세로선을 반대로 말씀하신거 아닌가)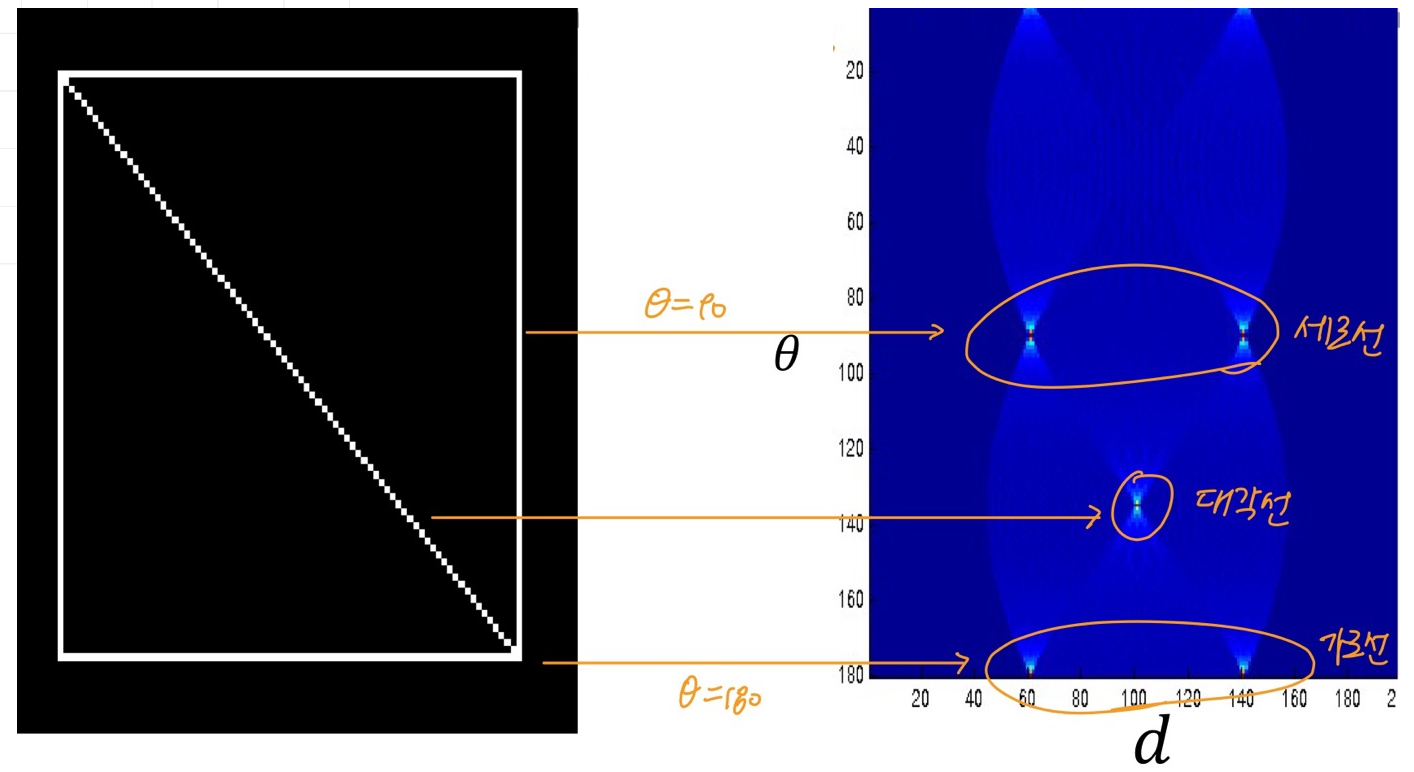
Extensions
- image gradient 사용
- Edge의 방향은 gradient 방향의 수직이므로, gradient 방향을 사용하기도 함
- edge의 방향을 보고, gradient 방향을 찾고 -> 이에 해당하는 θ에 투표 (근데 잘 안됨)

- gradient magnitude가 큰 애들은 더 많이 투표
- 확실히 edge인 것 같은 선에게 가중치를 더 많이
- (θ, d)의 resolution 바꾸기
- 지금까지는 1도 단위로 한 θ를 사용했는데,
- resolution을 높여서 더 작은 단위의 θ를 사용하면 더 세밀한 범위로 line을 찾을 수 있음
(대신 line 당 vote 수가 줄어듦)- 굉장히 비슷한 기울기인데 다른 line으로 처리할 수도 있음
- 세밀한 edge가 아닌 대강 찾고싶으면 resolution을 낮게
- 비슷한 기울기인 다른 line을 같은 line으로 처리
- (pixel 단위기 때문에 한 픽셀 어긋나면 완전 어긋나보일 수 있으므로 정밀한 조절이 필요)
Circle Hough Transform
- 원의 방정식 (원의 중심 a, b와 반지름 r -> 무조건 자유도 3개)

- 자유도가 3개라서 hough space의 table로 나타내기 어려움 (3차원이니까)
- 이미지의 한 점에서, 이 점을 포함하는 모든 원을 나타내기 위해 table에 원의 중심을 나타냄
- 여러 점을 circle hough space에 나타내면, 여러 점을 한번에 지나는 원의 중점을 찾을 수 있다.
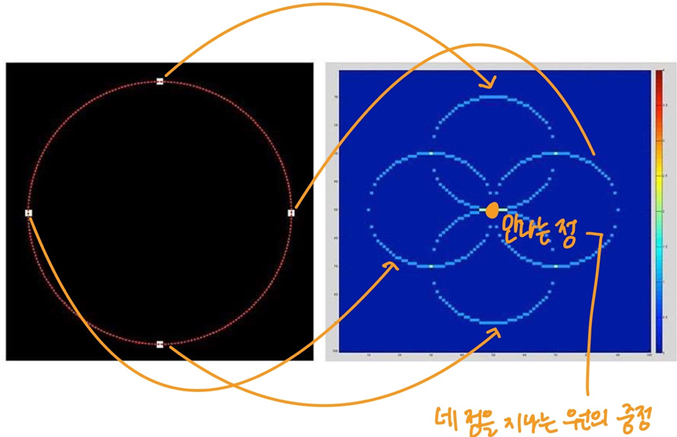
- 반지름은 z축으로 나타나며 뒤집힌 원뿔 형태로 보인다
- 위에서 circle hough transform의 교점 -> 투표를 가장 많이 받은 곳이 네 점을 지나는 원의 중점이고, 이때의 반지름은 z축으로의 값이라는 것


( •̀ .̫ •́ )✧