Loop closure
Loop closure는 이전에 방문했던 위치를 다시 방문했을 때, 같은 위치임을 인식하고 현재 위치에 대한 uncertainty를 줄이는 방법을 말한다.
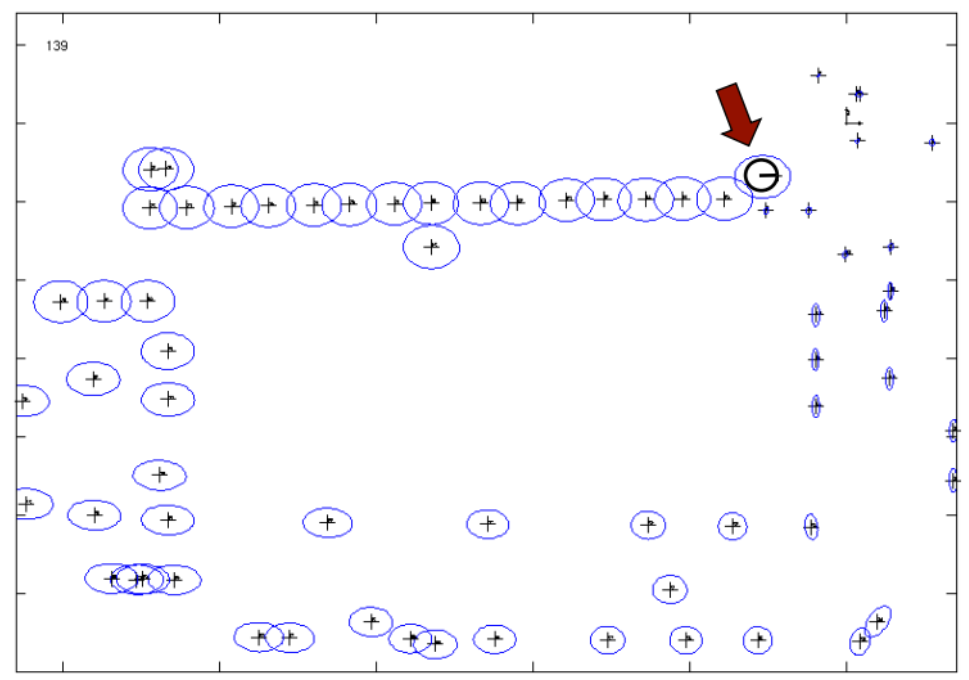
아래그림은 loop closing이 발생하기 전의 uncertainty를 보여주고 있다. 시작 위치에서부터 로봇이 이동을 할수록 control input과 observation의 uncertainty에 의해 로봇의 pose와 landmark 위치의 covariance가 증가한 것을 볼 수 있다.
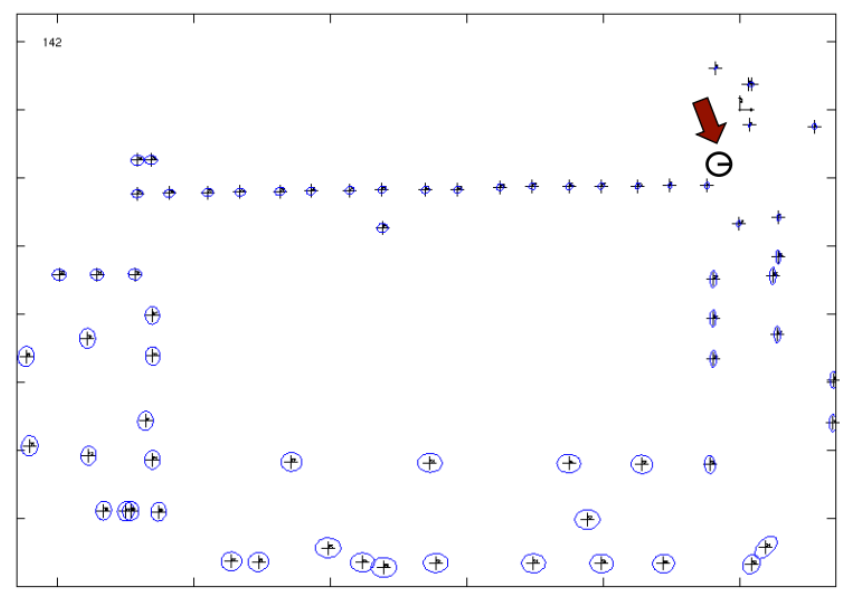
아래그림은 시작 위치로 로봇이 돌아와서 처음 관측했었던 landmark를 보았을 때, 즉 시작 위치에서 loop closing이 발생하였을 때를 보여준다. 로봇이 처음 출발하였을 때는 uncertainty가 작기 때문에 그때 관측된 landmark 또한 작은 covariance를 갖고 있다. loop가 발생하면 uncertainty가 작은 landmark의 위치에 의해 로봇의 위치와 landmark들의 위치가 보정되고, uncertainty 또한 줄어들게 된다.
출처 : http://jinyongjeong.github.io/2017/02/16/lec05_EKF_SLAM/

Done is better than perfect.