reading & summary
1.Intro

로봇 운영 체제(ROS 또는 ros)로봇 소프트웨어 개발을 위한 소프트웨어 프레임워크오로카(네이버카페) : http://www.oroca.org/로봇소스 : https://community.robotsource.org/로봇공학을 위한 열린 모임(페이스
2.SLAM 추정 효율성에 대한 고찰 - Rosen 2021 - Advances in Inference and Representation for Simultaneous Localization and Mapping
출처 : https://www.cv-learn.com/20230214-rosen-2021/
3.Deep SLAM 유형
딥러닝 + SLAM딥러닝 기반 모듈의 등장: SuperPoint/SuperGlue, NetVLAD, Depth estimation, Depth completion, Object detection, Semantic Segmentation딥러닝 기반 SLAM: UnDeep
4.C++ 병렬컴퓨팅 메모
https://blog.naver.com/modernquant/222492505434
5.Loop closure
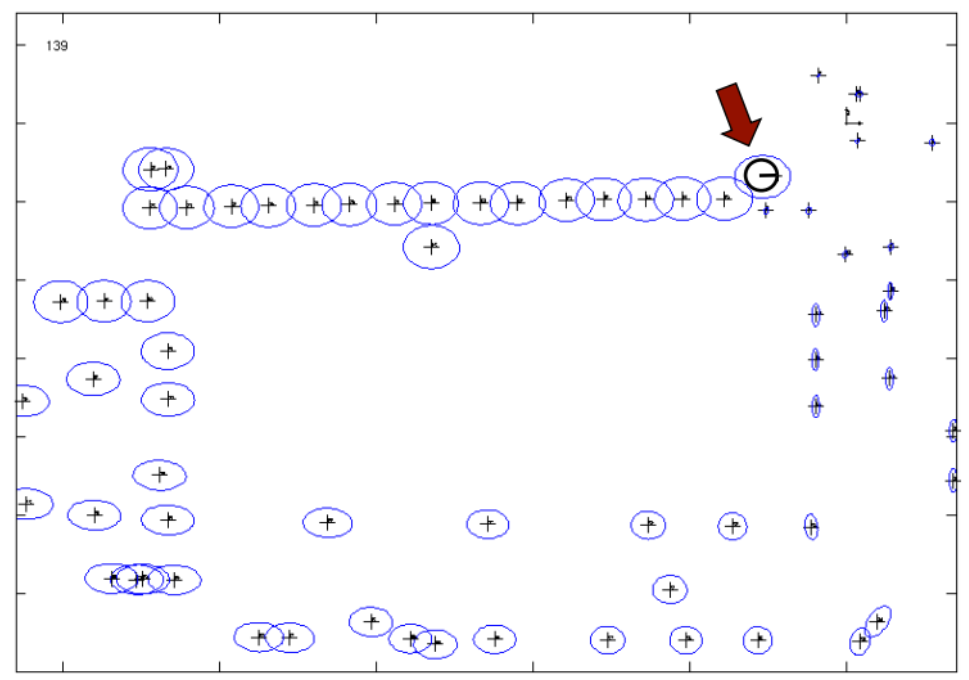
Loop closureLoop closure는 이전에 방문했던 위치를 다시 방문했을 때, 같은 위치임을 인식하고 현재 위치에 대한 uncertainty를 줄이는 방법을 말한다. 아래그림은 loop closing이 발생하기 전의 uncertainty를 보여주고 있다. 시
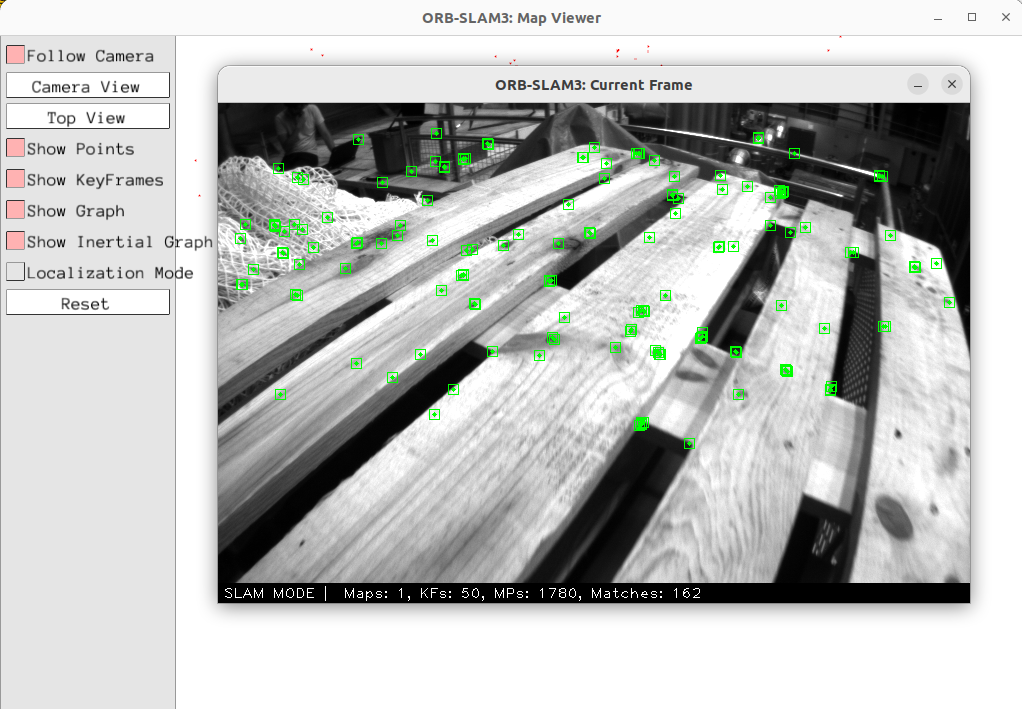
6.[Chat-GPT4] ORB-SLAM
Chat-GPT4에게 ORB-SLAM에 대해 설명해달라고 질문해보았다.ORB-SLAM(ORiented Brief and Simultaneous Localization And Mapping)은 모노큘러, 스테레오, 그리고 RGB-D 카메라를 사용한 시각 기반의 SLAM(
7.orbslam dataset
KITTI and EuRoC
8.ORB-SLAM2/3 accelerated on GPU
https://git.hipert.unimore.it/fmuzzini/cuda-accelerated-orb-slam/-/tree/main/ORB-SLAM3ORB-SLAM3 is the first real-time SLAM library able to perfo
9.Failed to find nvcc.
CMake Error at /usr/share/cmake-3.22/Modules/CMakeDetermineCUDACompiler.cmake:179 (message): Failed to find nvcc. Compiler requires the CUDA toolkit
10.CMake Error
CMake Error at CMakeLists.txt:51 (find_package): By not providing "Findvpi.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package
11.VPI(Vision Programming Interface)
VPI 설치에 선호되는 도구는 호스트와 대상 시스템 모두에서 설치 및 설정 프로세스를 자동화하는 SDK Manager 설치 프로그램 입니다.설치 프로그램에 대한 자세한 설명은 SDK Manager User Guide를 참조하세요 .메모SDK Manager 설치 프로그램
12.CMakeLists.txt
이러한 경우 CMakeLists.txt를 살펴보면 환경변수에 대해 등록된 값이 없어서 문제가 발생하게 된다. 수작업으로 경로를 지정해주면 된다.cmake_minimum_required(VERSION 2.8)project(AprilTagDetect)SET(OpenCV_D
13.VIO(Visual-Inertial Odometry)
Visual Odometry는 연속된 카메라 이미지들을 비교해서 프레임간의 Rotation과 Translation을 추정하고, 이 변화들을 쌓아가면서 카메라의 움직임을 트랙킹한다.Visual-Inertial Odometry (이하 VIO)는 기존에 사용했던 Visual
14.NMS Non-Maximum Suppression
일반적으로 Input image가 Object detection 알고리즘을 통과하면 Object에 bbox(Bounding box)가 그려지며 어떤 물체일 확률 값(Score)값을 가지게 된다. 이때 아래 그림 처럼 한 가지Object에 많은 bbox가 생긴다. 동일한
15.ORB SLAM3
ORB SLAM3 (Visual Inertial SLAM) 시각적 관성 동시위치추적Monocular modeMonocular-Inertial modeStereo modeStereo-Inertial mode출처 : https://taeyoung96.github.
16.Ceres Solver
Ceres Solver는 크고 복잡한 최적화 문제를 해결하기 위한 오픈 소스 C++ 라이브러리입니다. 이는 매우 다양한 목적으로 사용되며, 비선형 최소 제곱 문제, 번들 조정, 포즈 그래프 최적화 및 컴퓨터 비전, 로봇 공학 및 과학 계산에서 흔히 발생하는 최적화 문제
17.pointnet
In the provided code, the computational load is the greatest in the following sections:Convolutional Layers: The convolutional layers defined in STN3d
18.Pointnet
PointNet은 3D 데이터를 처리하고 분석하기 위해 설계된 딥 러닝 아키텍처로, LiDAR, 3D 스캐너 또는 깊이 카메라와 같은 출처에서 얻은 3D 데이터의 일반적인 표현인 포인트 클라우드 데이터를 처리합니다. 포인트 클라우드는 각각 위치와 색상 또는 강도와 같은
19.NMS with CUDA
Non-maximum suppression (NMS) is a technique used in computer vision and object detection to filter out redundant or overlapping bounding boxes or key
20.NMS 관련 논문

2020년 IEEE 컴퓨터 비전 및 패턴 인식 컨퍼런스(CVPR)에서 Kai Huang, Yunhong Wang, Xinggang Wang, Tiejun Huang이 발표한 "Hashing-based Non-Maximum Suppression for Crowded Ob
21.ubuntu core check
코어수 확인 grep -c processor /proc/cpuinfo
22.loop closing
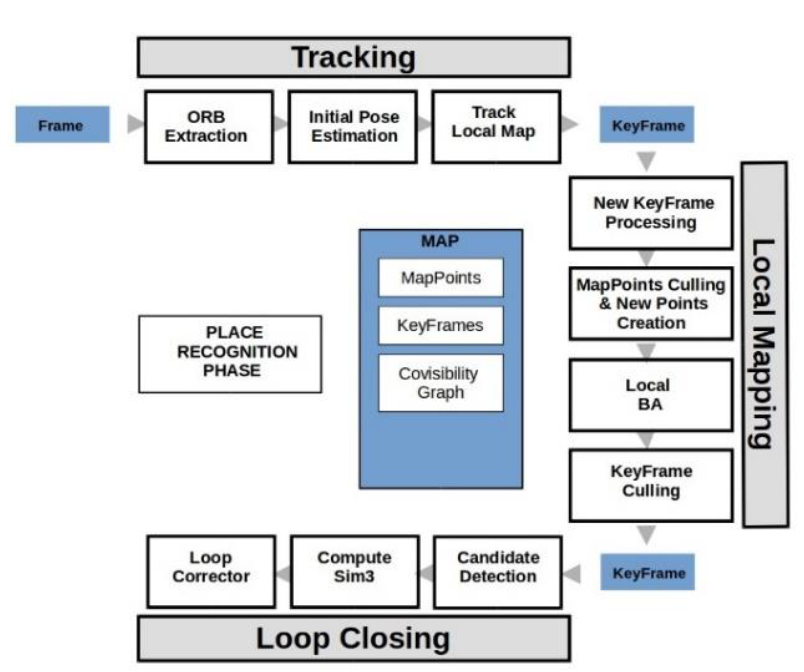
이미 탐색한 장소를 다시 방문했을 때 이를 감지하고 이전 지도와 현재 지도를 연결하는 작업입니다.ORB-SLAM3의 루프 닫기는 크게 두 단계로 이루어집니다.1\. 루프 검출 2. 루프 수정루프 검출은 현재 프레임에서 이전에 방문한 장소와 일치하는 장소를 찾는 작업입니
23.VPR 메모
안녕하세요 SAI KR! 오늘은 모바일 로봇의 핵심 기능 중 하나인 'Localization'에 대해 소개하고자 합니다. 이 기능은 로봇이 주변 환경을 파악하고 목표에 효과적으로 상호작용할 수 있게 해줍니다. 최근 연구 분야에서 주목받고 있는 것은 'Visual Pla
24.Visual Place Recognition: A Tutorial
The paper titled "Visual Place Recognition: A Tutorial" can be summarized and analyzed as follows: The paper serves as the first comprehensive tutor
25.DBloc (Database for Localization)과 Qloc (Query for Localization)
"DBloc"과 "Qloc"은 건물 내에서 휴대폰의 위치를 정확하게 파악하기 위한 시스템의 두 주요 구성 요소입니다. 이들은 시각적 위치 인식(Visual Place Recognition, VPR) 기술을 사용하여 위치를 파악하는 데 중요한 역할을 합니다.DBloc (
26.유사성 행렬
The pairwise similarity matrix SD. 쌍별 유사성 행렬 S쌍별 기술자 유사성 행렬 S는 VPR(시각 위치 인식)의 핵심 구성 요소입니다. 그림 1의 3단계에서 보여지듯이, S는 데이터베이스와 쿼리 집합의 이미지 기술자 간에 계산된 모든 유사성
27.demo.py 코드 구조
이 코드는 "Visual Place Recognition (VPR)"을 위한 파이썬 스크립트입니다. VPR은 카메라 이미지를 사용하여 특정 위치를 인식하는 기술입니다. 이 코드는 다양한 기능 추출기와 데이터셋을 사용하여 VPR을 수행하고 결과를 평가합니다. 자세한 설명
28.convex hull 관련 논문
A Parallel Algorithm for Convex Hull Computations: This paper discusses the application of convex hull computations in various fields like computer gr