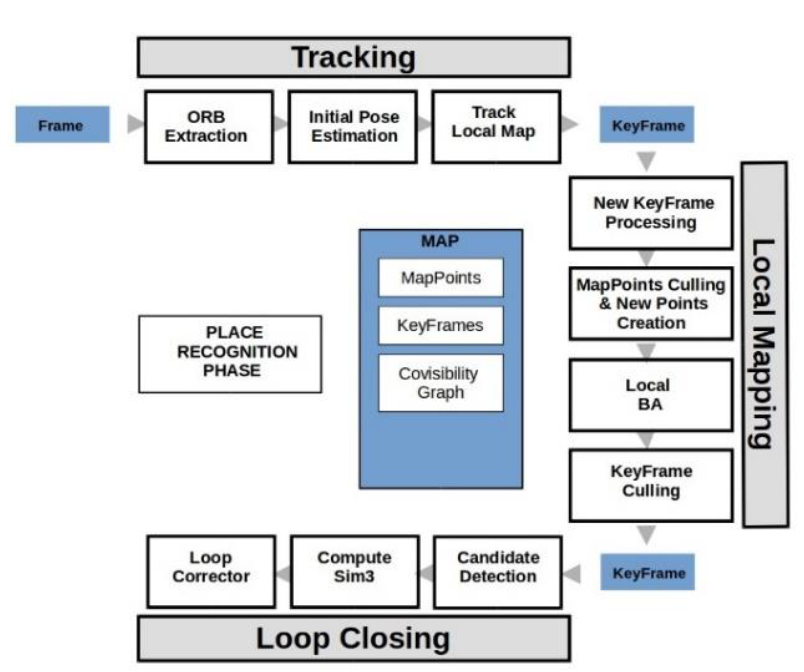
이미 탐색한 장소를 다시 방문했을 때 이를 감지하고 이전 지도와 현재 지도를 연결하는 작업입니다.
ORB-SLAM3의 루프 닫기는 크게 두 단계로 이루어집니다.
1. 루프 검출 2. 루프 수정
- 루프 검출은 현재 프레임에서 이전에 방문한 장소와 일치하는 장소를 찾는 작업입니다. ORB-SLAM3는 이를 위해 다음과 같은 방법을 사용합니다.
-
SIM3 검색
SIM3는 두 개의 카메라 간의 변환을 나타내는 3x3 행렬입니다. ORB-SLAM3는 SIM3 검색을 사용하여 현재 프레임의 특징과 이전 지도의 특징 사이의 일관성을 평가합니다. 일관성이 높은 특징이 충분히 많이 발견되면 두 장소가 일치할 가능성이 높습니다. -
최적화
SIM3 검색을 통해 후보 루프를 찾은 후 ORB-SLAM3는 최적화를 사용하여 두 개의 지도 사이의 정확한 변환을 계산합니다. 이 과정을 통해 루프의 정확도를 높일 수 있습니다.
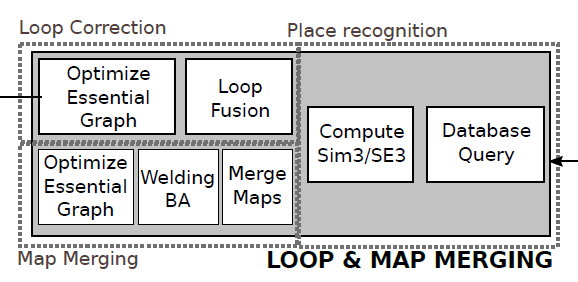
- 루프 수정
루프 수정은 루프 검출을 통해 찾은 루프를 SLAM 시스템에 통합하는 작업입니다. ORB-SLAM3는 이를 위해 다음과 같은 방법을 사용합니다.
- 후방 보정
후방 보정은 루프의 중심을 기준으로 SLAM 시스템의 상태를 업데이트하는 과정입니다. 이 과정을 통해 루프를 통해 연결된 두 지도 사이의 오차를 줄일 수 있습니다.
- 전역 최적화
전역 최적화는 SLAM 시스템의 전체 상태를 최적화하는 과정입니다. 이 과정을 통해 루프를 통해 연결된 두 지도뿐만 아니라 전체 맵의 정확도를 높일 수 있습니다.

Done is better than perfect.