[Point Review] LED2-Net: Monocular 360◦ Layout Estimation via Differentiable Depth Rendering
Point Review
목록 보기
14/26
Contribution

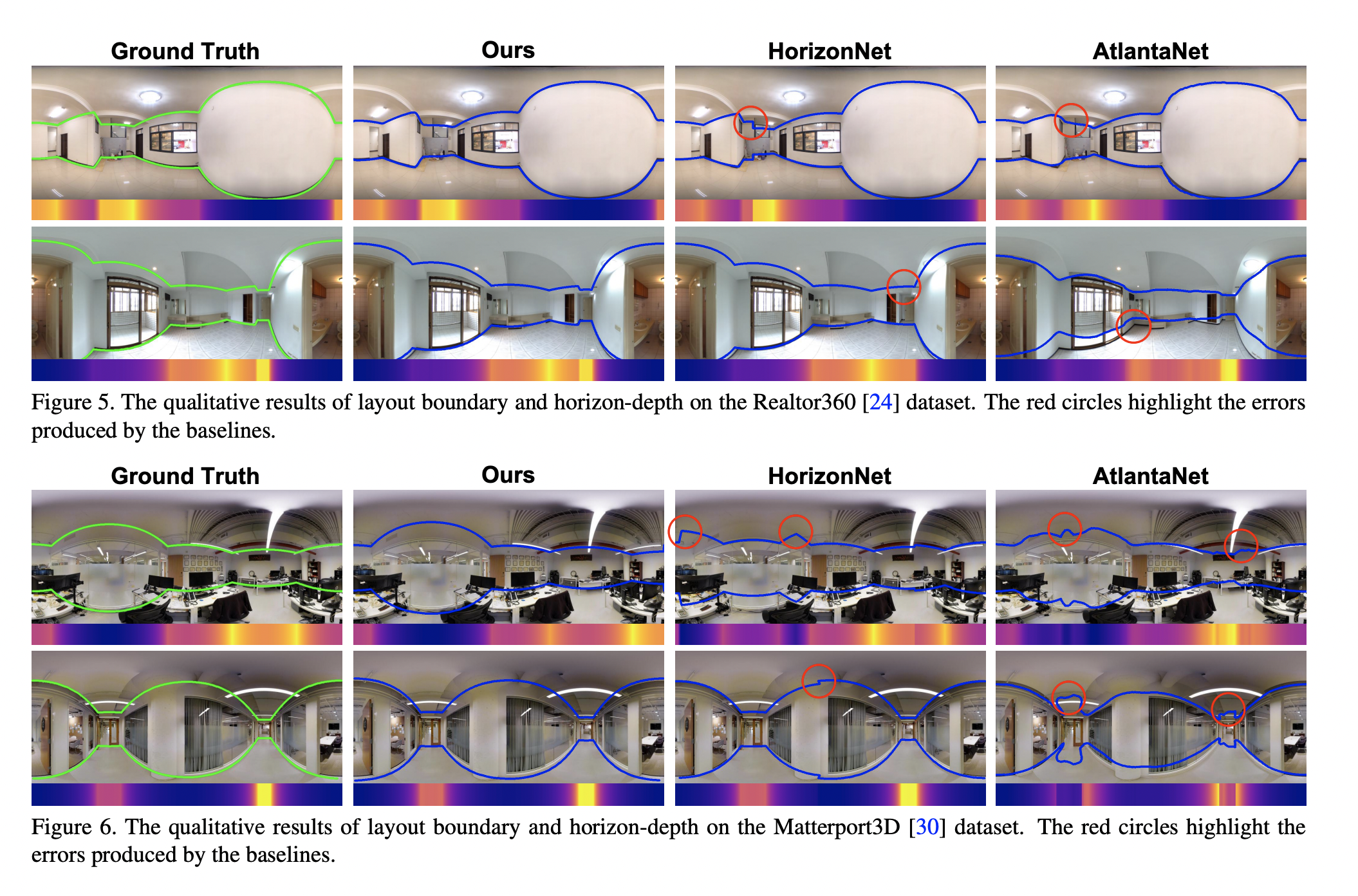
HorizonNet과 같은 기존의 Layout estimation 모델들은 2D Panorama 상에서의 좌표로 loss를 정의하지만 2D 상에서 동일한 오차가 서로 다른 depth value를 가지게 된다.
-> "horizon depth를 활용하자"
Methods
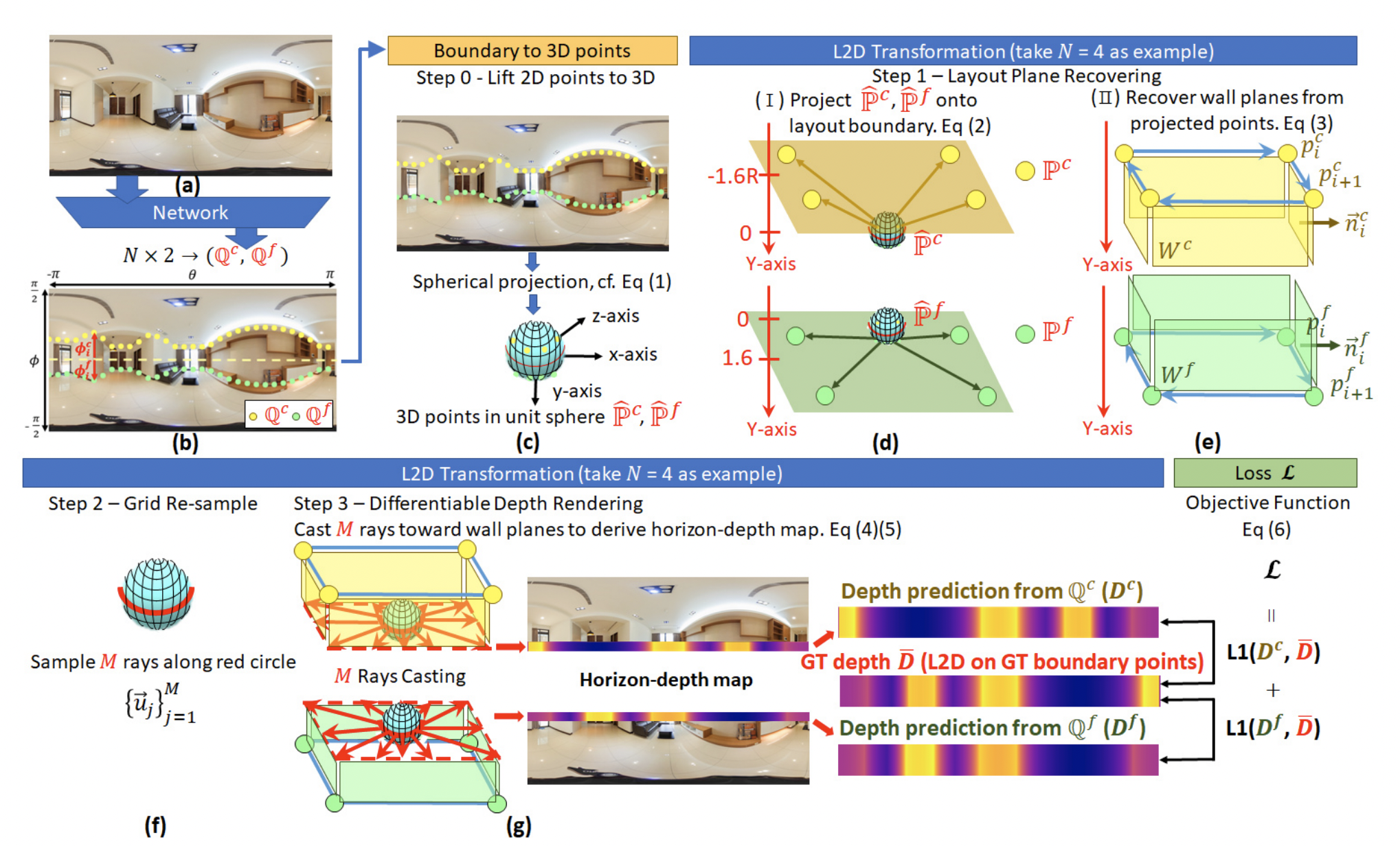
- 벽과 floor/ceiling과의 경계에 해당하는 좌표의 집합 를 구한다.
- Unit sphere 상에서의 cartesian 좌표계로 변환하여 로 정의한다.
- 의 모든 점들을 boundary로 projection 한다. 는 카메라의 높이와 카메라 center로부터 천장까지의 거리의 비율을 의미한다.
- 축의 unit vector인 와 boundary 좌표의 벡터를 외적하여 벽의 normal vector 을 구한다. 는 plane 방정식의 offset을 의미하며 개의 벽에 대한 plane 방정식 집합 을 구한다.
- 개의 ray와 wall plane의 교차점을 통해 horizon-depth map을 얻는다.
- Loss function으로는 L1 loss를 사용한다.
Results