- 패스트캠퍼스 컴퓨터비전 초격차 패키지 강의 수강 내용을 개인적으로 정리하였습니다.
Edge
Edge와 Corner의 차이
 Edge가 일직선으로 이루어졌다고 하면 매칭되는 구간이 많아질 수 있다. (특정 방향 Gradient 높음)
Edge가 일직선으로 이루어졌다고 하면 매칭되는 구간이 많아질 수 있다. (특정 방향 Gradient 높음)
Corner는 유사한 포인트가 있을 순 있지만, 대체로 하나의 포인트와 매칭될 수 있다. (두 방향 이상에서의 Gradient가 높음)
Flat은 어떠한 매칭점이 없는 경우라서 Gradient도 낮다
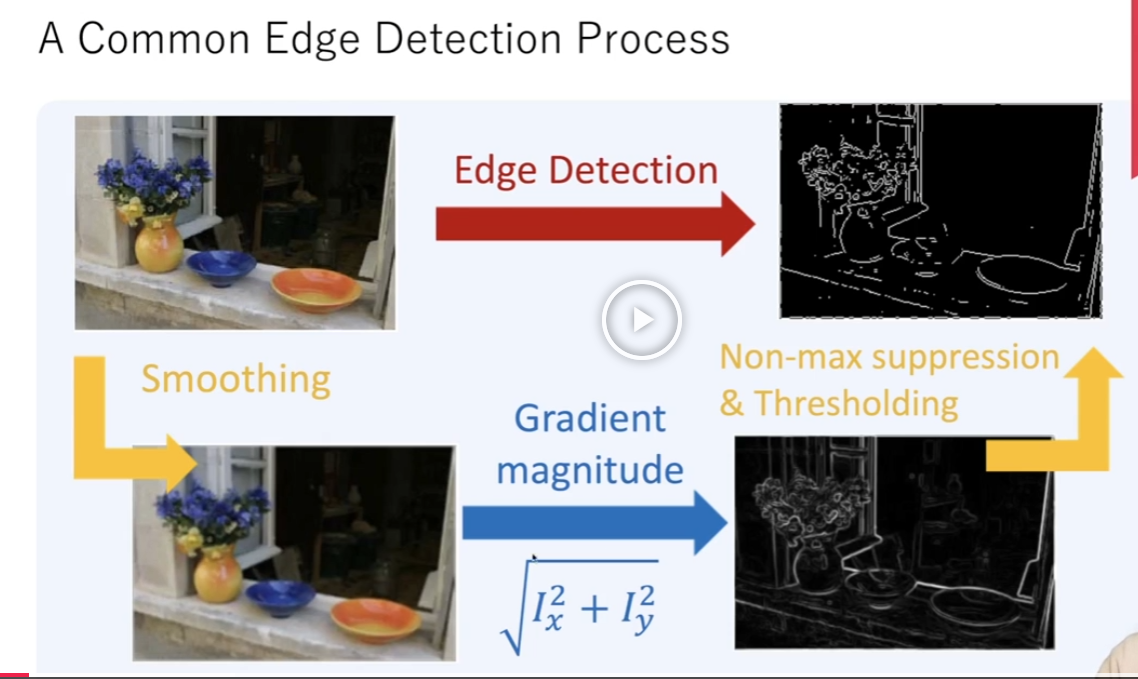
1. 이미지를 가우시안 등으로 스무딩 -> Denoising
2. Gradient magnitude를 계산 -> 변화의 세기
3. NMS 적용하고 Thresholding 처리
여기서 중요한건 2번인데 Gradient = Derivative 로 생각할 수 있고 이는 결국 이미지의 특정 포인트에서 픽셀의 Intensity 변화량이 센 영역을 찾는 것을 의미한다. 변화량이 크지 않은 평평한 영역은 이 값이 낮을 것이다.
Canny
대표적인 구현체로는 Canny가 있다. Canny에는 min과 max threshold가 있으며 아래 그림으로 설명된다
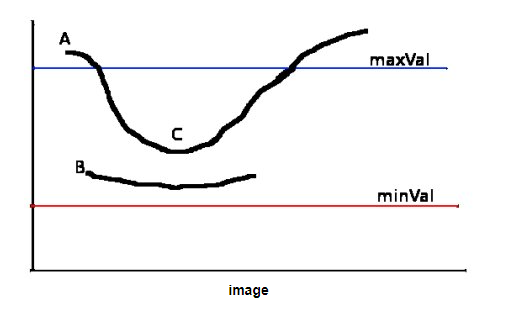
max_val보다 크다면 무조건 edge인거고, min_val보다 작으면 무조건 edge가 아니다. 다만 min과 max 사이에 있는 값의 경우에는 max_val보다 커서 edge라고 판정된 영역과 연결되어 있다면 edge로 취급하는 것이다.
Corner
 주변 값과의 차이에 비례하므로, 주변값과의 차이가 클수록 코너일 가능성이 높아진다.
주변 값과의 차이에 비례하므로, 주변값과의 차이가 클수록 코너일 가능성이 높아진다.
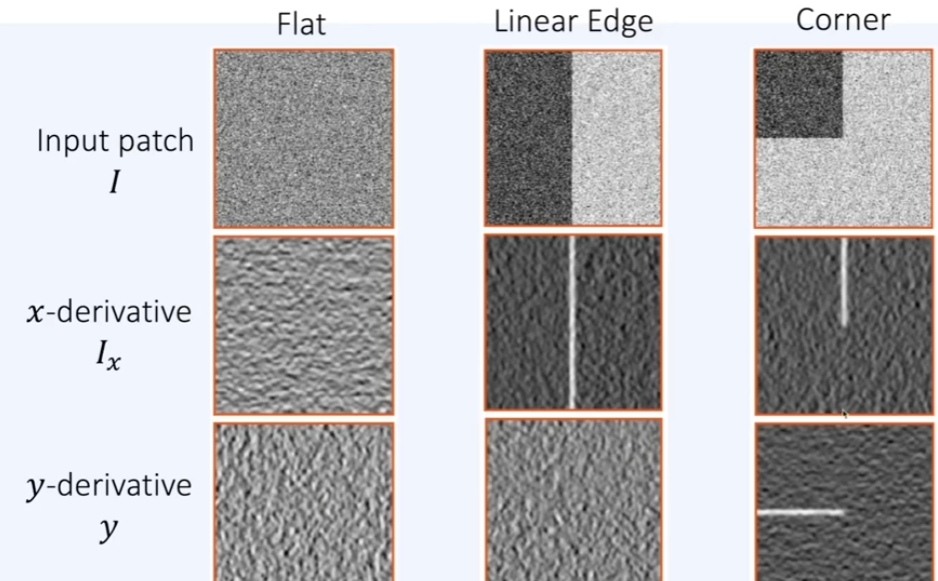
위 예시에서 x와 y로의 derivative가 모두 높은 포인트가 존재하며 해당 지점은 Corner라고 볼 수 있다
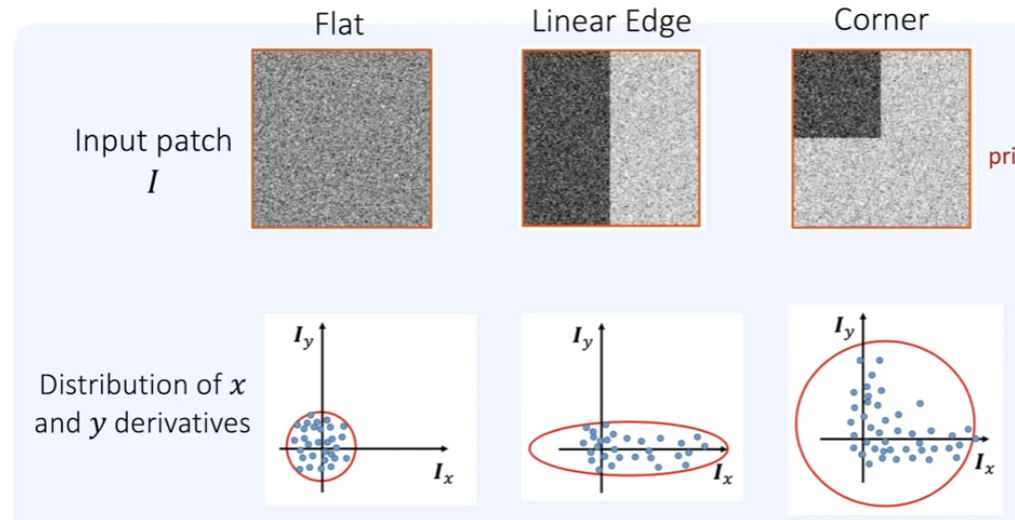
이미지 전체에서 윈도우 슬라이딩을 하며 Corner Detection을 하였을때, x와 y derivative에 대한 산점도를 그릴 수 있는데 이 분포에 따라 셋 중 어떤 상태인지 추론해볼 수 있다
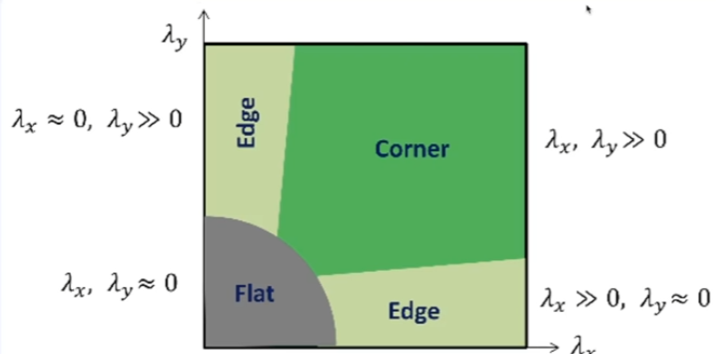
그 중 1사분면만 보았을때 위 그림과 같이 표현할 수 있다
Harris Corner Detection
코너 디텍션에서 가장 유명한 알고리즘 중 하나
Blob
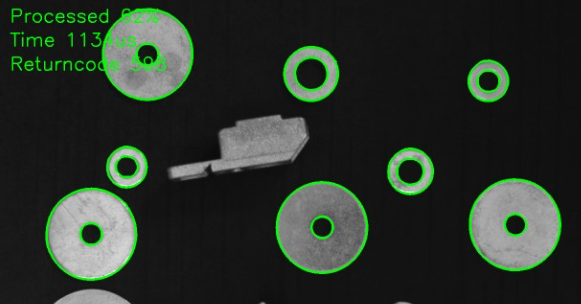
주변보다 밝거나 어두운 영역을 의미한다
Edge와 Blob의 차이
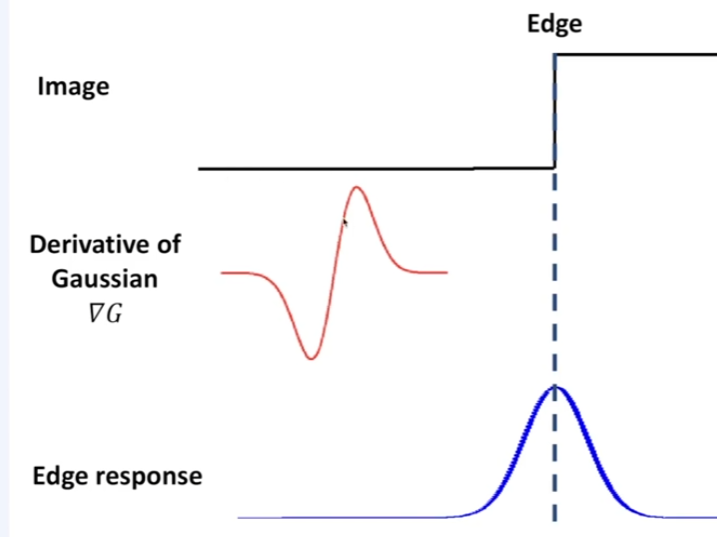
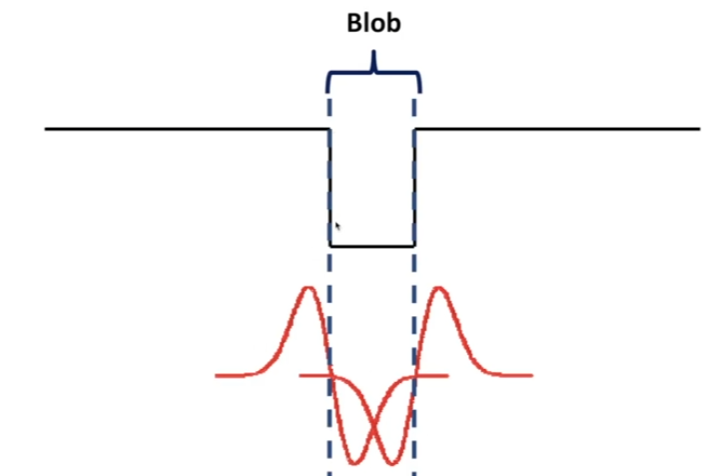
Edge는 Intensity가 이전에 비해 높아지거나 낮아진채로 유지되며 위에 설명했듯이 Gaussian Derivative로 구할 수 있다. Blob은 Intensity가 높아지거나 낮아졌다가 다시 원상태로 돌아오는 형태를 의미한다. 그래서 Gaussian Derivative를 각 rising 및 falling edge 영역에서 정방향 및 역방향으로 적용해주는 것이다

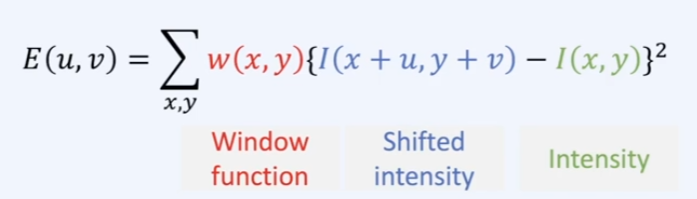
식으로 비교한다면
Edge: Derivative of Gaussian (DoG)
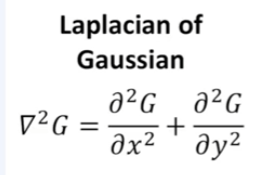
Blob: Laplacian of Gaussian (LoG)
라플라스 = 2차 미분 연산이고 왜 2차 미분을 하는지는 위에서 설명하였듯이 Blob은 변화는 포인트가 2개이기 때문이다.
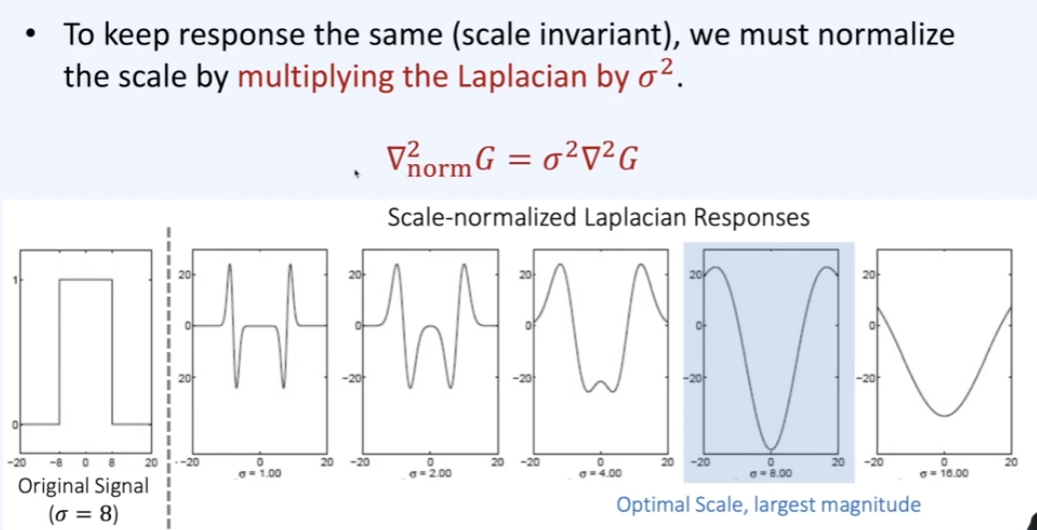
scale invariant한 속성을 유지하기 위해서 σ^2 을 곱해주어 normalization을 해주어야 한다
필요한 이유
SIFT(Scale Invariant Feature Transform)에 사용되는 Feature로 활용하기 위해서