Computer Vision
1.Edge와 Corner 그리고 Blob
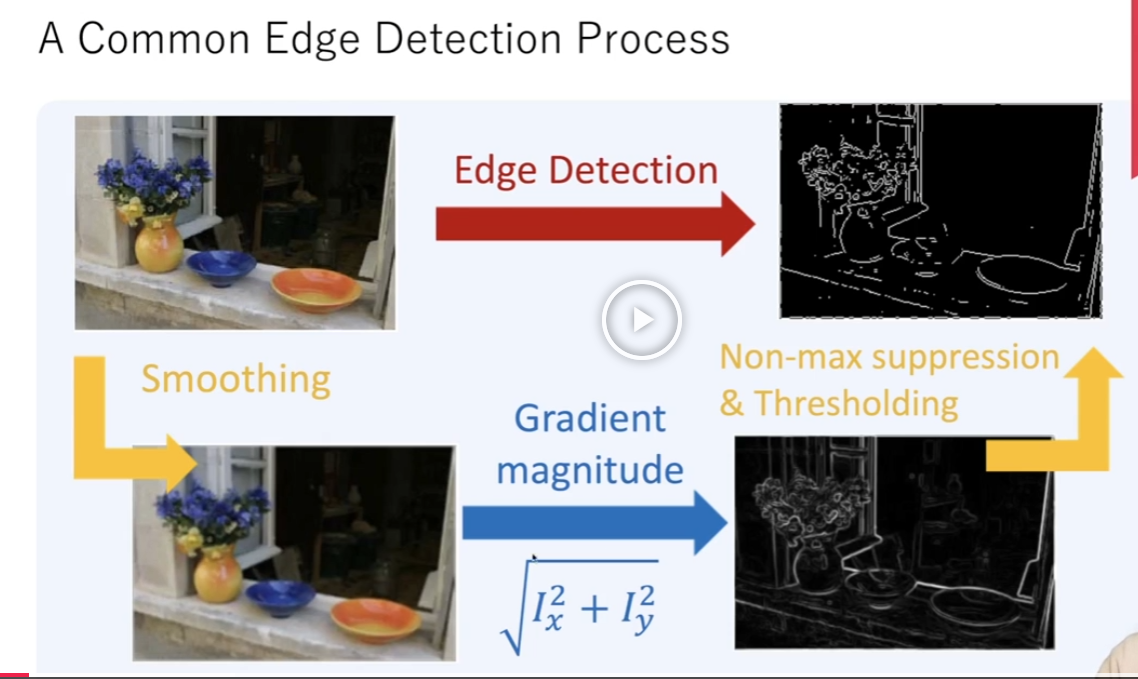
패스트캠퍼스 컴퓨터비전 초격차 패키지 강의 수강 내용을 개인적으로 정리하였습니다. Edge가 일직선으로 이루어졌다고 하면 매칭되는 구간이 많아질 수 있다. (특정 방향 Gradient 높음)Corner는 유사한 포인트가 있을 순 있지만, 대체로 하나의 포인트와 매칭될
2.SIFT와 ORB
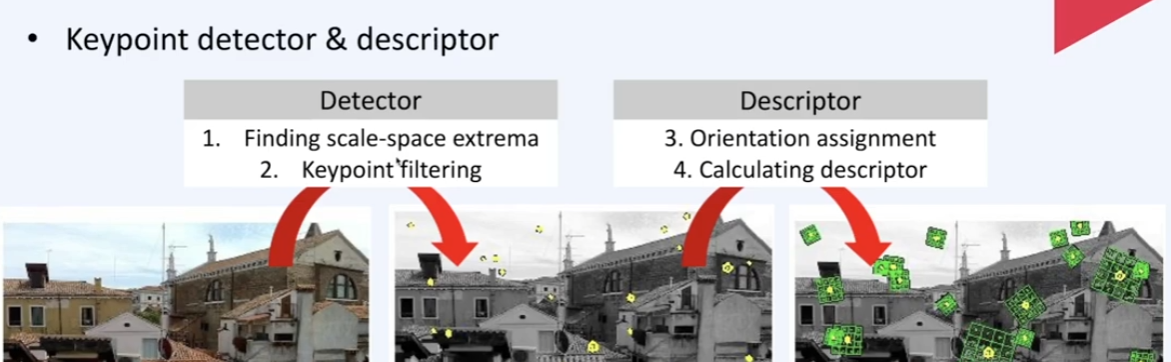
패스트캠퍼스 컴퓨터비전 초격차 패키지 강의 수강 내용을 개인적으로 정리하였습니다.1\. Detector : 키포인트를 찾는 과정2\. Descriptor : 방향 정보를 계산하고 최종 피쳐를 뽑아냄Blob feature를 뽑는데에는 기본적으로 LoG(라플라시안, 2번
3.RANSAC
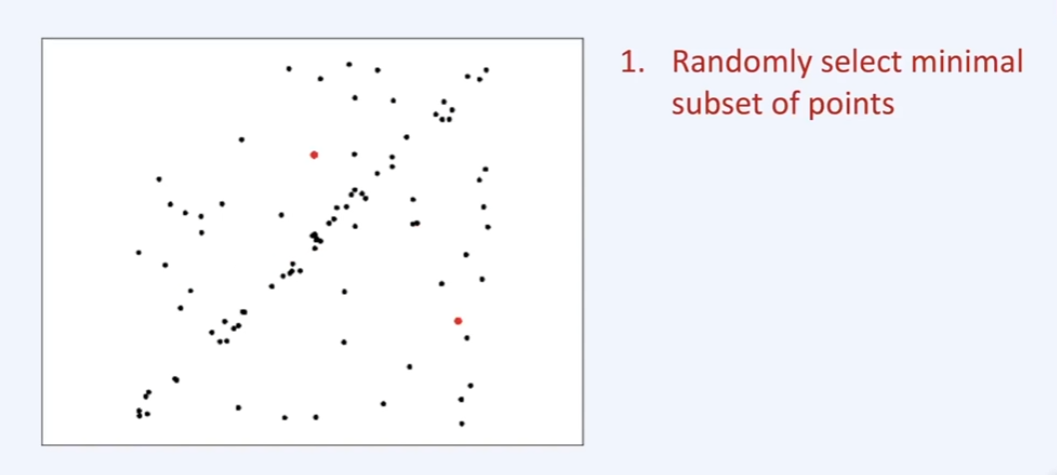
랜덤하게 n개의 점을 뽑는다. 여기선 2개두 점을 가지고 선분을 그리고 해당 선분에서 일정 마진을 두어 두개의 평행한 선을 그린다. 그리고 해당 영역 내부에 얼마나 많은 점들이 속해있는지를 count 한다만약에 점이 n개였다면 일종의 contour가 그려질 것이고, 그
4.Hough Transform
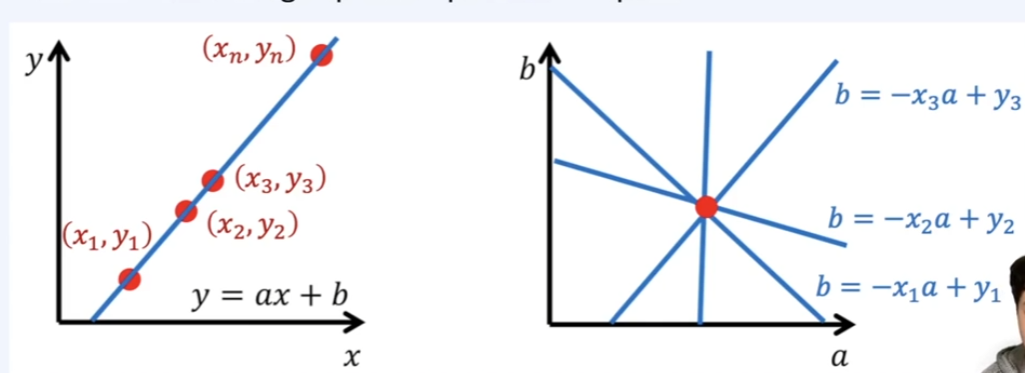
좌측과 같은 x,y 평면 (image space) 상의 어떠한 점을 a,b에 대한 parameter space로 표현하면 직선이 된다다른 말로하면 이러한 직선들의 교점을 찾으면 x,y 평면 상의 직선을 찾을 수 있다 그러나 parameter space에서는 어떠한 선분
5.Generative vs Discriminative
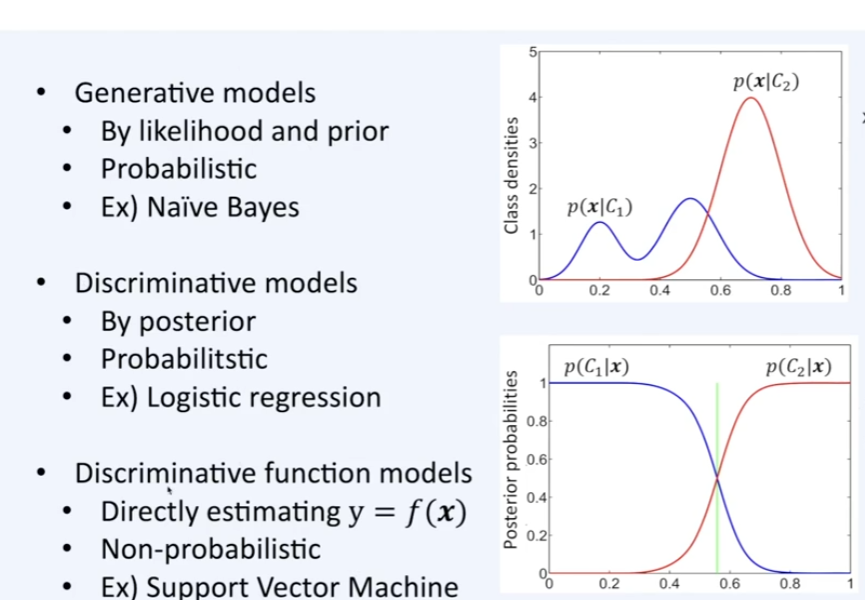
분포 기반의 model 분포를 가지고 어떤 군집에 속하는지 판단분포를 가지고 새로운 데이터를 생성Naive Bayes이미지의 각 피쳐가 어떤 클래스 k에 속하는 지에 대한 조건부 확률 값들을 계산이러한 확률 값들을 전부 곱하고, 가장 max가 되는 k를 찾는다decis
6.CNN
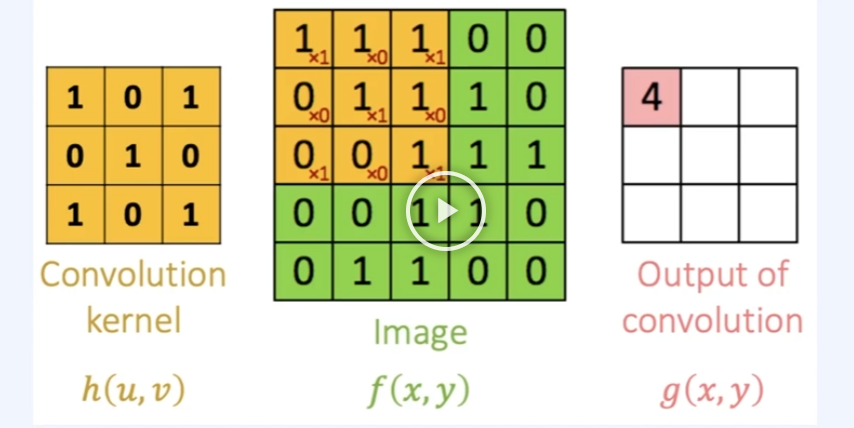
이미지 위에서 일정 크기의 커널 (n x n) 이 윈도우 슬라이딩을 하며 진행하는 연산각 윈도우에서는 행렬끼리 element-wise하게 곱한 뒤, 그 값을 전부 합해주는 연산이다.합할 때마다 그 값은 새로운 output의 스칼라 값으로 대응된다이러한 컨볼루션 연산은
7.Explainable CNN
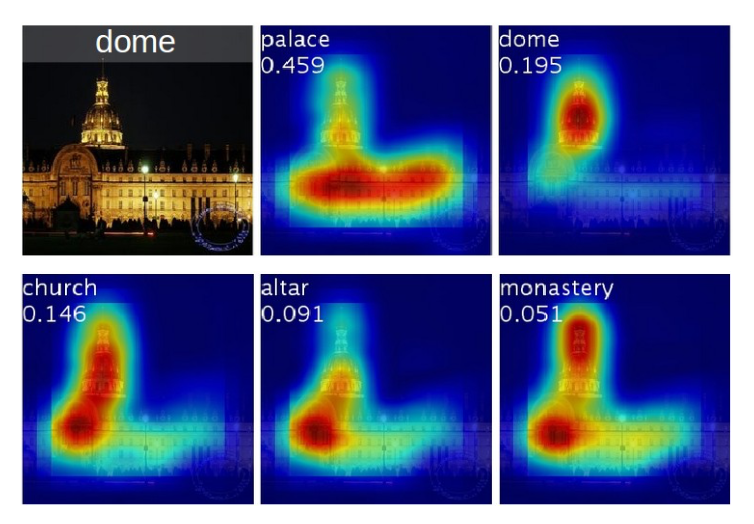
일반적으로는 메트릭만 가지고도 모델이 잘 학습되었는 지를 파악할 수 있지만, 이미지 기반 모델의 경우 Feature Map을 시각화 해서 보면 모델이 어떤 식으로 학습되었고 어떤 부분에 집중하는 지를 조금 더 직관적으로 파악할 수 있다.Pytorch에서는 위와 같이 모
8.Image Thresholding
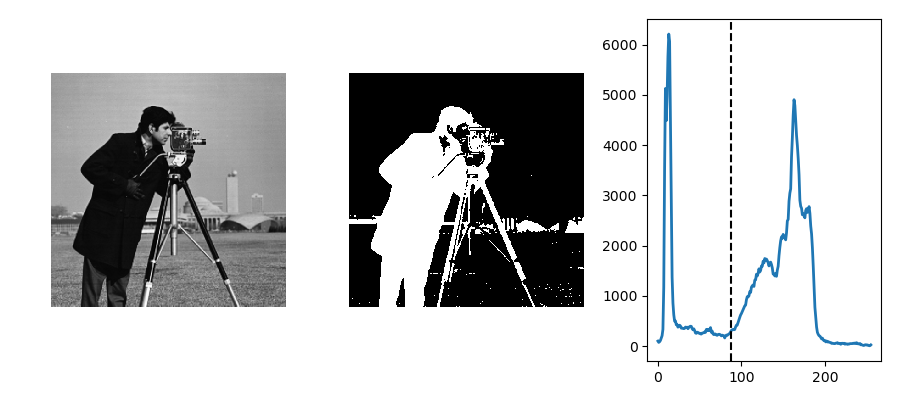
이미지 이진화는 일반적으로 이미지 전체를 0과 1(또는 255)로 구성된 binary image로 만드는 작업을 말한다. 노이즈 제거, 백그라운드 제거 등에 사용될 수 있다.히스토그램을 만들고 적당한 기준 값을 구한 뒤 이보다 크면 1, 작으면 0으로 처리하는 것이다.
9.Color Space
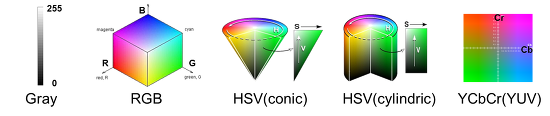
RGB는 R(Red), G(Green), B(Blue) 3차원으로 색을 표현하는 방식이다. 255 x 255 x 255 개의 색상을 표현할 수 있으며 값이 클수록 흰색, 작을수록 검정색에 가까워진다.OpenCV에서는 BGR 순으로 사용되며, numpy에서는 H,W에 이
10.Image Resize

이미지를 조절할때 cv2.resize를 사용한다cv2.resize(src, dsize, dst=None, fx=None, fy=None, interpolation=None) -> dst• dsize: 결과 영상 크기. (w, h) 튜플. (0, 0)이면 fx와 fy 값