Action
- 노드 간 통신 방식 중 하나로, Service와 유사하지만 더 오래 걸리는 작업에 적합
ㄴ Action Server: 클라이언트의 요청(goal)을 받아 작업을 수행하고 결과(result)를 반환
ㄴ Action Client: 목표(goal)를 보내고, 피드백과 결과를 비동기적으로 수신 - 수행 중인 작업의 진행 상황을 알려주는 feedback 메시지가 존재함
명령어
1. 액션 목록
- 존재하는 액션 리스트를 볼 수 있음
ros2 action list
2. 액션 정보 확인
- 액션 정보 확인
ros2 action info [action_name]
ㄴ 옵션
-t: 인터페이스 정보 출력
3. 인터페이스 목록
ros2 interface list
ㄴ 필요 시 사용자 정의 메시지로 확장하는 것이 일반적
4. 인터페이스 데이터 구조
- .action 파일은 다음과 같은 세 가지 영역으로 구성됨
# goal 영역
---
# result 영역
---
# feedback 영역5. 액션 서버에 요청 보내기
- 액션 서버에 목표(goal)를 보내고 결과 수신
ros2 action send_goal [action_name] [action_type] '{goal_field: value}'
ㄴ 옵션
--feedback: 처리 중 피드백 출력
--once: 피드백 한 번만 출력
명령어 요약
| 목적 | 명령어 예시 |
|---|---|
| 실행 중 액션 보기 | ros2 action list |
| 액션 타입 확인 | ros2 action type /my_action |
| 액션 인터페이스 보기 | ros2 interface show my_pkg/action/MyAction |
| 액션 goal 보내기 | ros2 action send_goal /my_action my_pkg/action/MyAction '{goal: ...}' |
| 액션 상태 확인 | ros2 action status /my_action |
| 액션 취소 | ros2 action cancel /my_action |
Server & Client 생성
- 클라이언트가 서버에 로봇을 좌/우로 회전 시키는 요청 발송
- 서버가 로봇을 좌우로 회전시키고 클라이어트에 응답 회신
ㄴ 1초에 30도씩 회전
ㄴ 중간 피드백 전송
1. 인터페이스 생성
복잡한 인터페이스 생성 작업에는 ament_cmake 기반이 더 쉽고 표준적
ament_cmake 기반 패키지를 생성하여 인터페이스 관리
-
인터페이스 관리를 위한 패키지 생성
ros2 pkg create --build-type ament_cmake interface_package --dependencies rclcpp std_msgs -
액션 인터페이스를 추가하기 위한 디렉터리 생성
mkdir action -
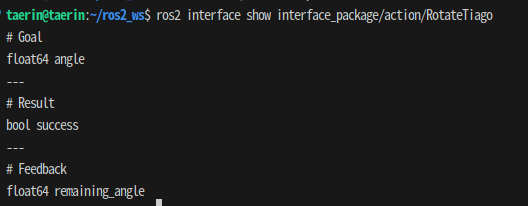
action/RotateTiago.action 추가
# Goal float64 angle --- # Result bool success --- # Feedback float64 remaining_angle
- CMakeLists.txt 및 package.xml 수정
CMakeLists.txt
# 이 부분 추가 find_package(rosidl_default_generators REQUIRED) # 아래는 패키지 생성시 --dependencies std_msgs 시 자동 생성 # find_package(std_msgs REQUIRED) set(interface_files "action/RotateTiago.action") ### 여러개 추가할 때 ### set(interface_files "action/RotateTiago.action" "action/RotateTiago_2.action" "action/RotateTiago_3.action" ) rosidl_generate_interfaces(${PROJECT_NAME} ${interface_files} DEPENDENCIES std_msgs )
package.xml
# 아래 내용 추가 # 빌드할 때 메시지를 컴파일하기 위해 rosidl_default_generators가 필요하다고 선언 <build_depend>rosidl_default_generators</build_depend> # 실행 시간(runtime)에 메시지를 해석하거나 사용하는 데 필요한 의존성 <exec_depend>rosidl_default_runtime</exec_depend> # 인터페이스 패키지 그룹(메시지나 서비스 정의하는 패키지)에 속함을 선언 # ROS2에서 메시지 정의 패키지로 자동 인식되기 위해 필요 <member_of_group>rosidl_interface_packages</member_of_group>
- 패키지 빌드 및 생성 확인
colcon build --symlink-install --packages-select interface_package
ros2 interface show interface_package/action/RotateTiago
3. Server & Client 노드 작성
- server
import rclpy
from rclpy.action import ActionServer
from rclpy.node import Node
from interface_package.action import RotateTiago
from geometry_msgs.msg import Twist
import time
class RotateActionServer(Node):
def __init__(self):
super().__init__('rotate_action_server')
# 액션 서버 오픈
self.action_server = ActionServer(
self,
RotateTiago,
'rotate_tiago',
self.execute_callback
)
# 로봇 제어 publisher
self.publisher_ = self.create_publisher(Twist, 'cmd_vel', 10)
self.get_logger().info(f"rotate_tiage server is ready")
def execute_callback(self, goal):
self.get_logger().info(f"execute goal to twist : {goal.request.angle}")
remain_ang = goal.request.angle
twist = Twist()
twist.angular.z = 0.5 if remain_ang > 0 else -0.5
# 피드백 메시지 초기화
feedback = RotateTiago.Feedback()
# 목표 각도에 도달할 때까지 반복
while abs(remain_ang) > 0.35:
# 로봇 움직임
self.publisher_.publish(twist)
remain_ang -= twist.angular.z
# 피드백 메시지 업데이트 및 publish
feedback.remaining_angle = remain_ang
goal.publish_feedback(feedback)
time.sleep(1.5)
# 정지
twist.angular.z = 0.0
self.publisher_.publish(twist)
# 목표 도달 및 응답
# 성공적으로 처리됐음을 액션 서버 내부 상태에 표시
goal.succeed()
result = RotateTiago.Result()
result.success = True
self.get_logger().info('goal compelete')
return result
def main(args=None):
rclpy.init(args=args)
node = RotateActionServer()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()-
서버 실행 후 동작 확인
서버 실행 :ros2 run tiago_rotation_action rotate_server
서버 요청 :ros2 action send_goal -f /rotate_tiago interface_package/action/RotateTiago "{angle: -1.57}"
ㄴ 움직임 확인 가능 -
client
import rclpy
from rclpy.node import Node
from rclpy.action import ActionClient
from interface_package.action import RotateTiago
import sys
class RotateActionClient(Node):
def __init__(self):
super().__init__('rotate_action_client')
# 액션 클라이언트 생성
self.action_client = ActionClient(
self,
RotateTiago,
'/rotate_tiago',
)
self.get_logger().info(f"rotate_tiage client start")
def send_goal(self, angle):
self.get_logger().info('Waiting for action server...')
self.action_client.wait_for_server()
goal_msg = RotateTiago.Goal()
goal_msg.angle = angle
self.get_logger().info(f'Sending goal: {angle}')
# 1. 여기는 goal을 요청, 요청에 대한 처리결과(수락/거절)만 받음
self.response = self.action_client.send_goal_async(
goal_msg,
feedback_callback=self.feedback_callback
)
# goal에 대한 처리결과(수락/거절)에 대한 콜백 함수
self.response.add_done_callback(self.goal_response_callback)
def goal_response_callback(self, res):
# 2. 처리결과(수락/거절) 확인
if not res.result().accepted:
self.get_logger().error('Goal rejected')
return
self.get_logger().info('Goal accepted')
# 3. 수락시 goal의 결과를 여기서 요청 및 콜백 함수로 처리
self.res_result = res.result().get_result_async()
self.res_result.add_done_callback(self.get_result_callback)
def get_result_callback(self, goal_result):
result_msg = goal_result.result()
if result_msg.result.success:
self.get_logger().info('completed successfully!')
else:
self.get_logger().error(f'failed')
self.destroy_node()
rclpy.shutdown()
def feedback_callback(self, feedback_msg):
self.get_logger().info(f'remain angle : {feedback_msg.feedback.remaining_angle}')
def main(args=None):
rclpy.init(args=args)
action_client = RotateActionClient()
# 명령줄 인자 처리
angle = 1.57 # 기본값
if len(sys.argv) > 1:
angle = float(sys.argv[1])
try:
action_client.send_goal(angle)
rclpy.spin(action_client)
except KeyboardInterrupt:
action_client.get_logger().info('Keyboard interrupt received, shutting down...')
finally:
if rclpy.ok():
rclpy.shutdown()
if __name__ == '__main__':
main()- setup.py 추가
entry_points={
'console_scripts': [
'rotate_server = tiago_rotation_action.rotate_server:main',
'rotate_client = tiago_rotation_action.rotate_client:main',
],
},- 노드 실행
서버 :ros2 run tiago_rotation_action rotate_server
클라이언트 :ros2 run tiago_rotation_action rotate_client -2
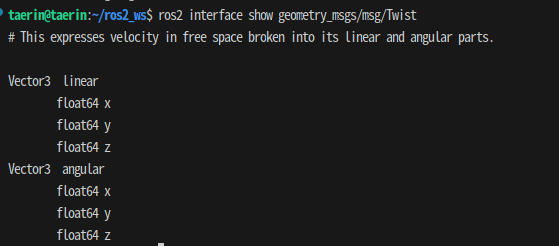
geometry_msgs/msg/Twist 이해하기
- Vector3 linear # 직진 속도 (m/s)
ㄴ 📦 linear (직진 방향)
ㄴ x: 앞으로(+)/뒤로(-) 직진
ㄴ y: 왼쪽(+)/오른쪽(-) 옆걸음 (holonomic robot일 때만!)
ㄴ z: 위(+)/아래(-) 이동 (드론이나 3D 이동 가능한 로봇만 해당)
- Vector3 angular # 회전 속도 (rad/s) : 초당 몇 라디안으로 회전할지를 의미
ㄴ 🔁 angular (회전 방향)
ㄴ x: 좌우로 몸 기울이기 (pitch) – 일반적으로 사용 안 함
ㄴ y: 앞뒤로 몸 흔들기 (roll) – 일반적으로 사용 안 함
ㄴ z: 좌우 회전 (yaw) – 이것만 잘 쓰면 회전 끝

taerin