란 ? 비정형 데이터를 다룰 수 있고, denstiy-based (밀도기반) 이다.
전체 데이터를 한 번 쭉 스캔하면서 각 포인터를 core, border, noise point 로 구분해 낸다.
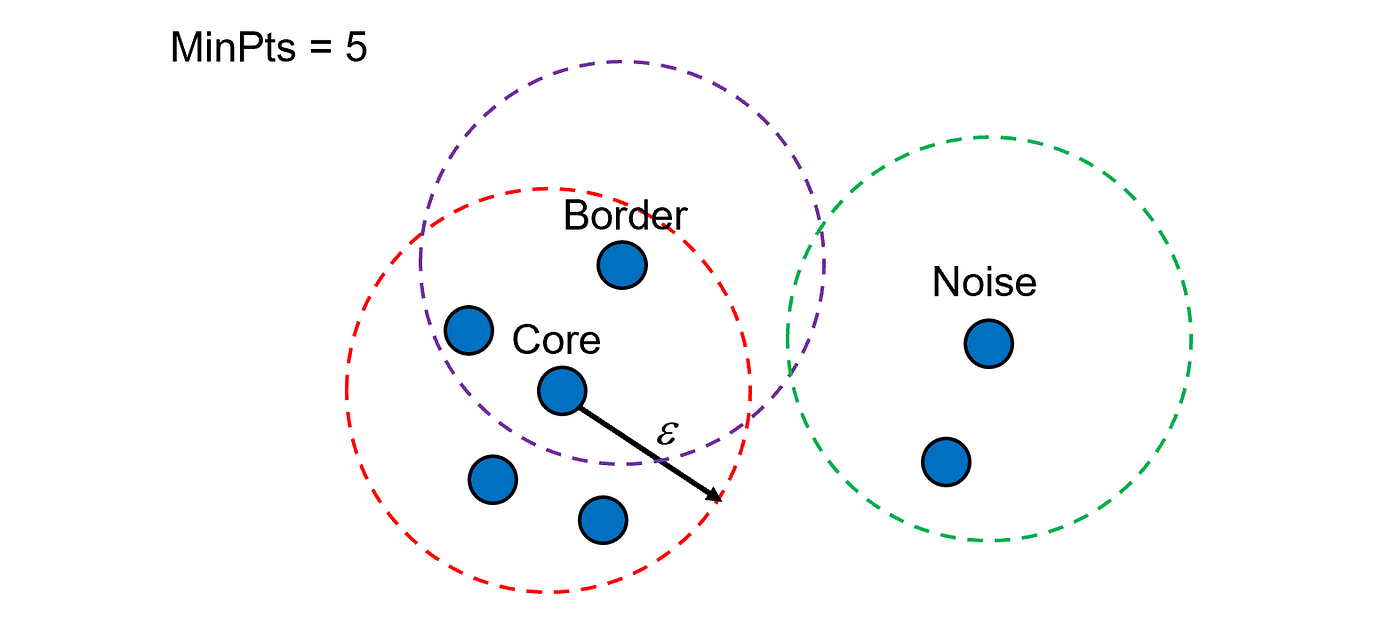
Core point : 나의 반경 내의 포인터 수 >= MinPts
Border point : 나의 반경 내 포인터 수 < MinPts , 그러나 core point을 포함 하고 있다.
noise point: 나의 반경 내 포인터 수 < MinPts , Core point도 포함하고 있지 않다.
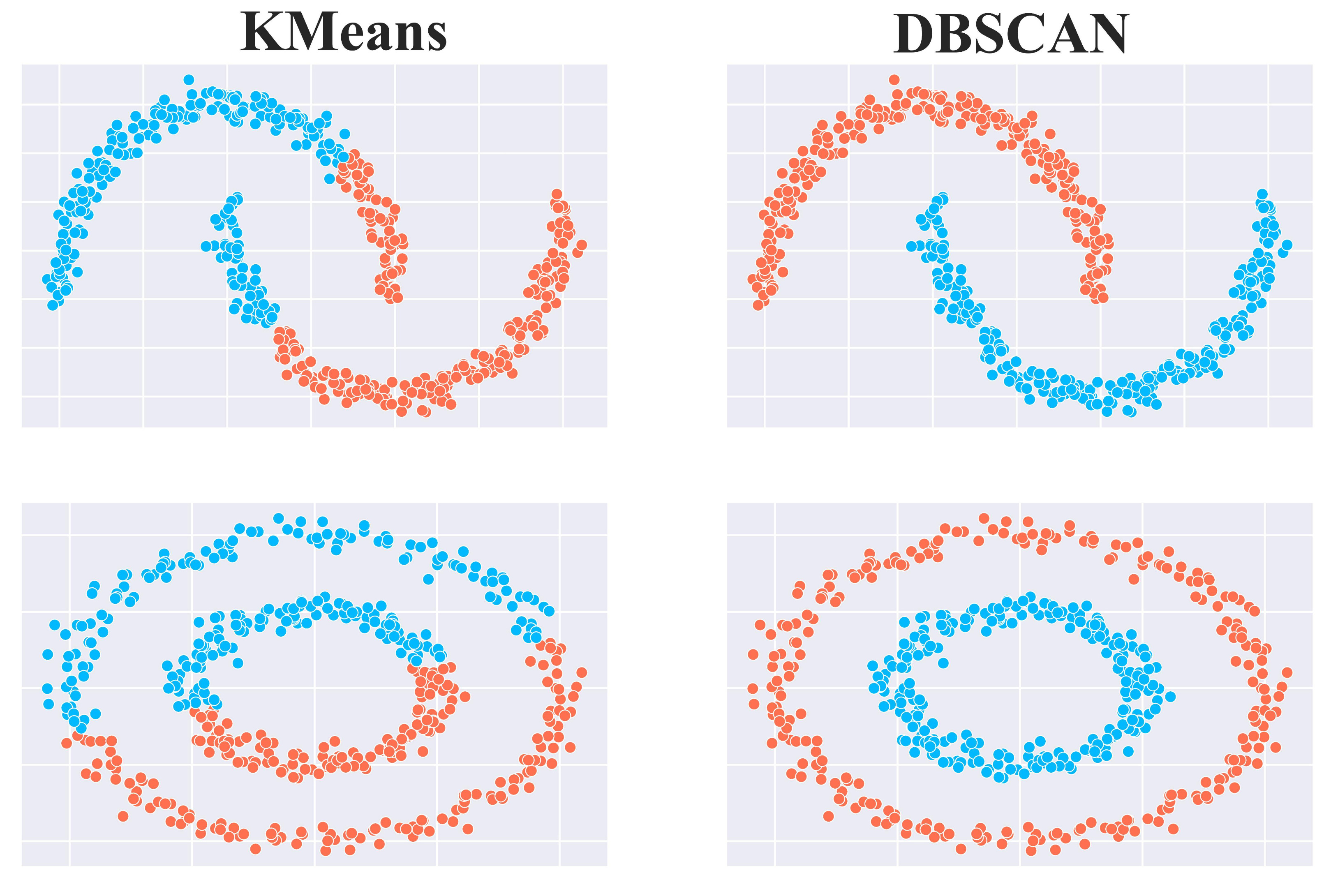
- 이처럼 비정형 데이터를 잘 구분한다.

Let's study hard!