1. 영상의 필터링
영상의 필터링
- 영상에서 필요한 정보만 통과 시키고 원치 않은 정보를 걸러내는 작업
- 블러링 , 샤프닝 , 잡음 제거 , 에지 검출 등
주파수 공간에서의 필터링
- 푸리에 변환을 이용하여 영상을 주파수 공간으로 변환하여 필터링을 수행하는 방법

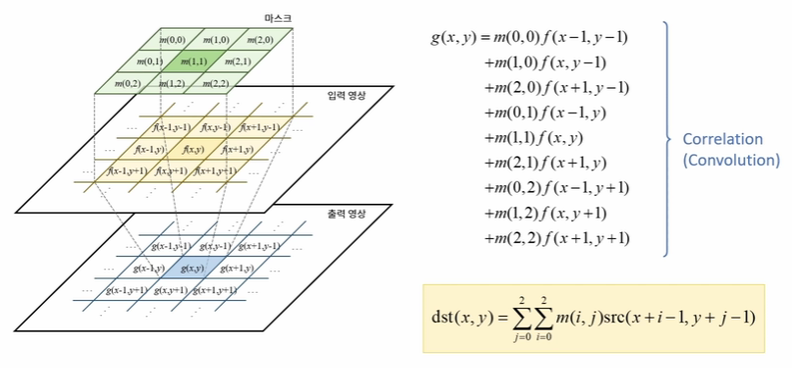
공간적 필터링
- 영상의 픽셀 값을 직접 이용하는 필터링 방법
- 주로 마스크 연산을 이용
- OpenCV에서는 공간적 필터링 마스크 크기가 커질 경우 주파수 공간에서의 필터링을 수행
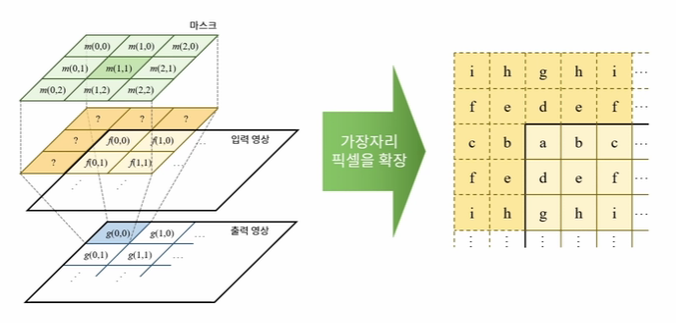
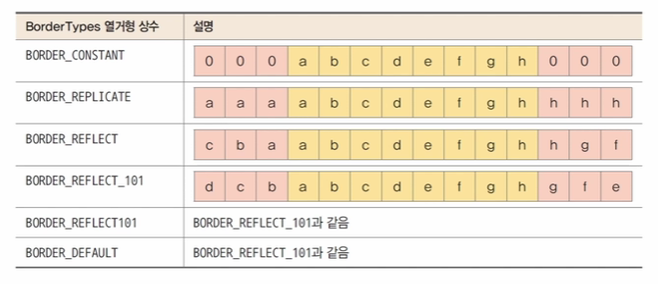
최외곽 픽셀 처리
-
최외곽 바깥에 가상의 픽셀이 있다고 가정
-
OpenCV 필터링에서 지원하는 가장자리 픽셀 확장 방법
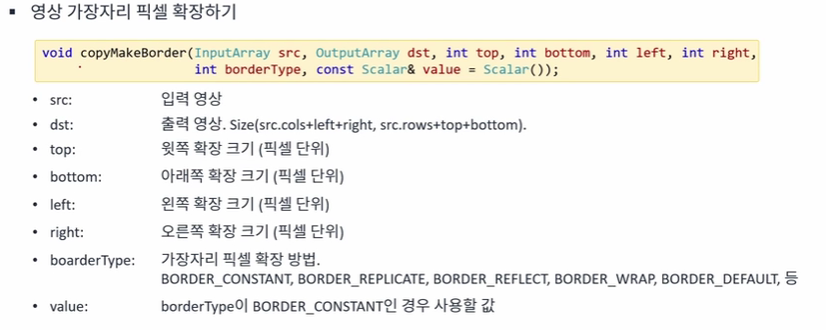
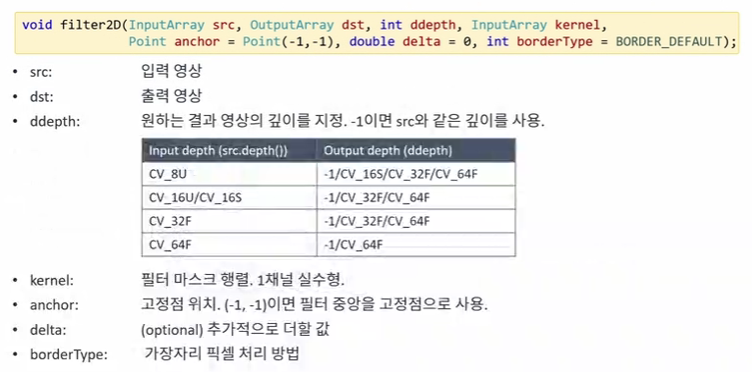
기본적인 2D 필터링 함수
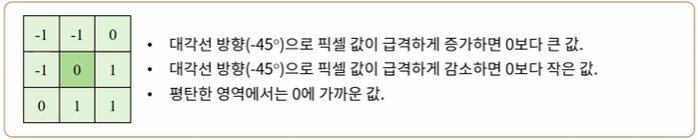
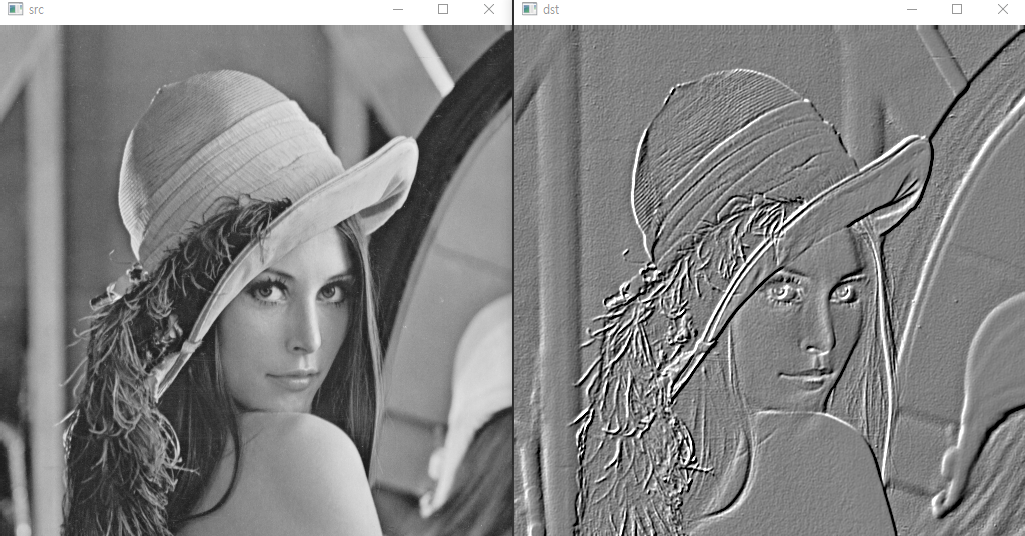
엠보싱 필터
- 엠보싱 이란 직물이나 종이 , 금속판 등에 올록볼록한 형태로 만든 객체의 윤곽 또는 무늬
- 입력 영상을 엠보싱 느낌이 나도록 변환하는 필터
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
int main(void)
{
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
float data[] = { -1, -1, 0, -1, 0, 1, 0, 1, 1 };
Mat emboss(3, 3, CV_32FC1, data);
Mat dst;
filter2D(src, dst, -1, emboss, Point(-1, -1), 128);
imshow("src", src);
imshow("dst", dst);
waitKey();
}- 실행 결과
2. 블러링
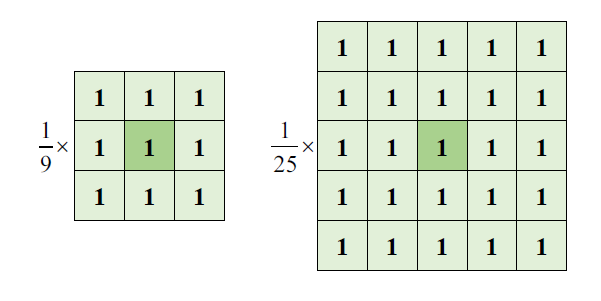
평균 값 필터
-
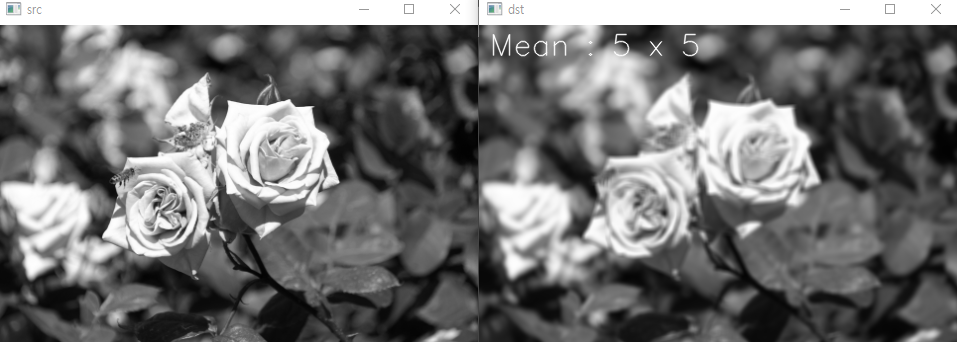
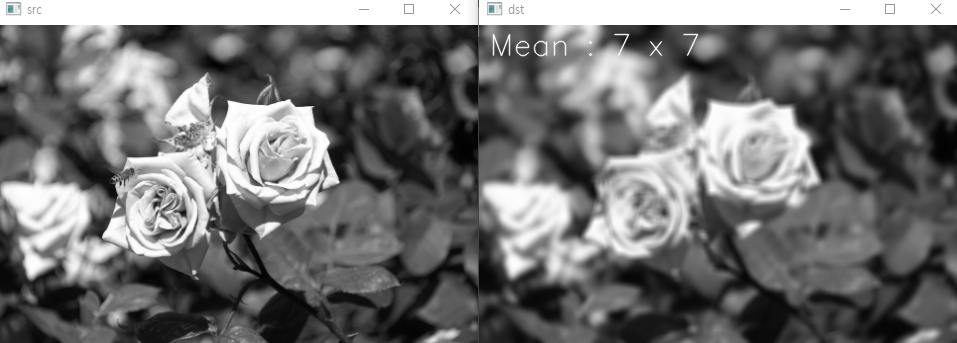
각각의 좌표에서 주변 픽셀 값들의 산술 평균을 계산하고 이를 출력 영상의 픽셀 값으로 설정
-
영상에 평균 값 필터를 적용하면 인접한 픽셀 간의 급격한 그레이스케일 값 변화가 줄어들어 날카로운 에지가 무뎌지고 영상에 있는 잡음이 감소하는 효과
-
마스크 크기가 커질수록 평균 값 필터 결과가 더욱 부드러워짐 -> 더 많은 연산량이 필요

-
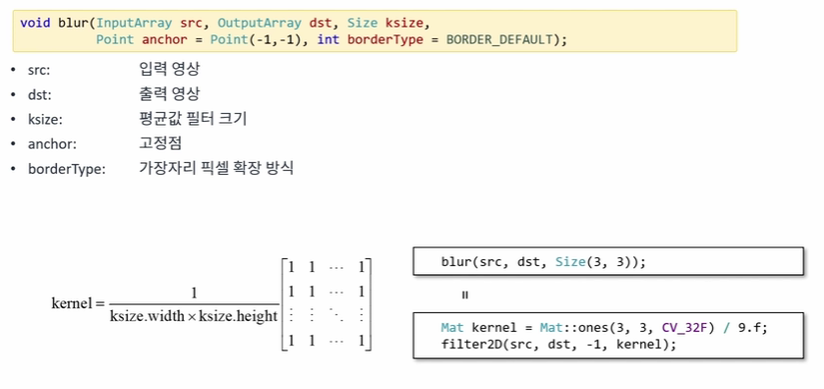
평균 값 필터를 이용한 블러링 함수
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
imshow("src", src);
Mat dst;
for (int ksize = 3; ksize <= 7; ksize += 2) {
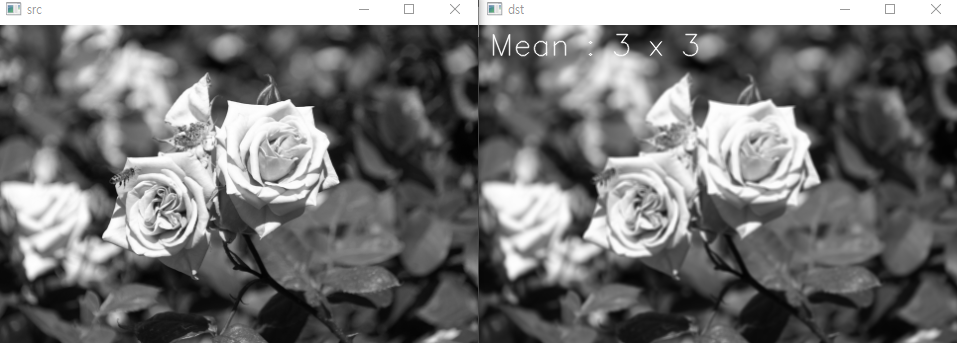
blur(src, dst, Size(ksize, ksize));
String desc = format("Mean: %dx%d", ksize, ksize);
putText(dst, desc, Point(10, 30), FONT_HERSHEY_SIMPLEX, 1.0,
Scalar(255), 1, LINE_AA);
imshow("dst", dst);
waitKey();
}
}- 실행 결과
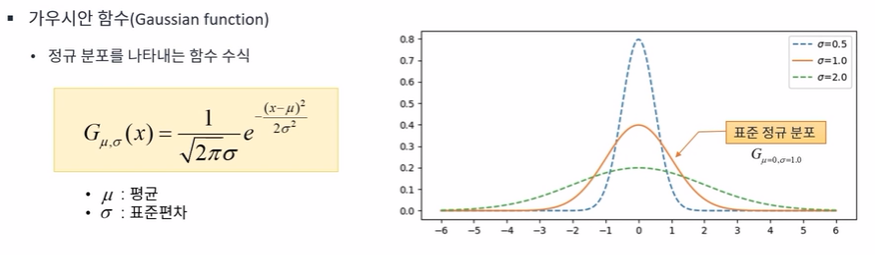
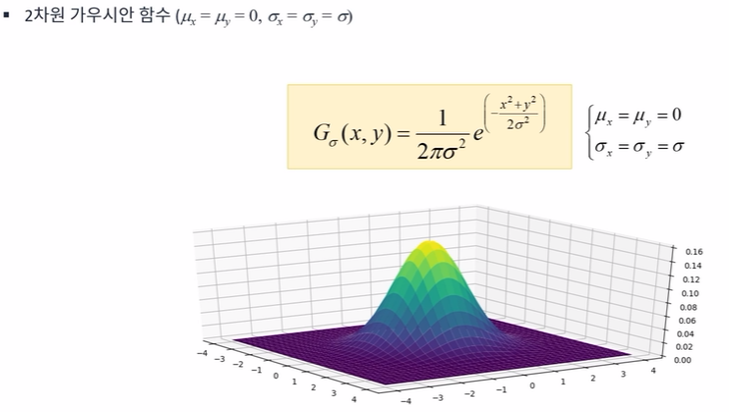
정규 분포와 가우시안 함수
- 정규 분포란 평균을 중심으로 좌우대칭인 종(bell)모양을 갖는 확률 분포
- 가우시안 분포
- 자연계에서 일어나는 수많은 일을 설명할 수 있음
- 키 , 몸무게 , 시험점수 , 잡음 , 오차 , 수명 등
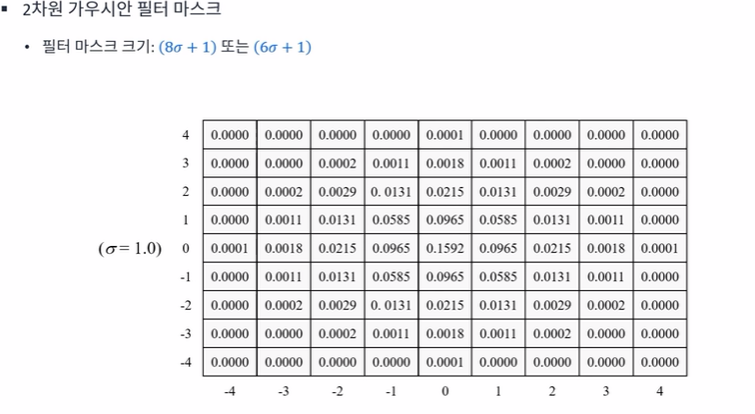
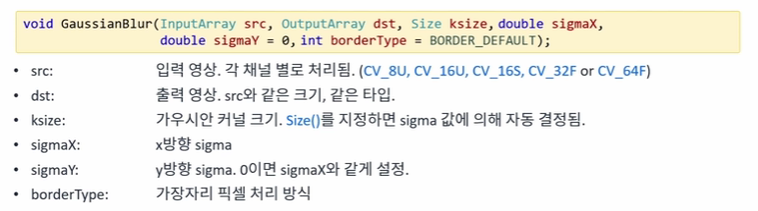
가우시안 필터링
- OpenCV 가우시안 필터링 함수
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
int main(void)
{
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
imshow("src", src);
Mat dst;
for (int sigma = 1; sigma <= 5; sigma++) {
TickMeter tm;
tm.start();
GaussianBlur(src, dst, Size(0, 0), (double)sigma);
tm.stop();
cout << "sigma: " << sigma << ", time: " << tm.getTimeMilli() << " ms." << endl;
String desc = format("Sigma = %d", sigma);
putText(dst, desc, Point(10, 30), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(255), 1, LINE_AA);
imshow("dst", dst);
waitKey();
}
}-
실행 결과
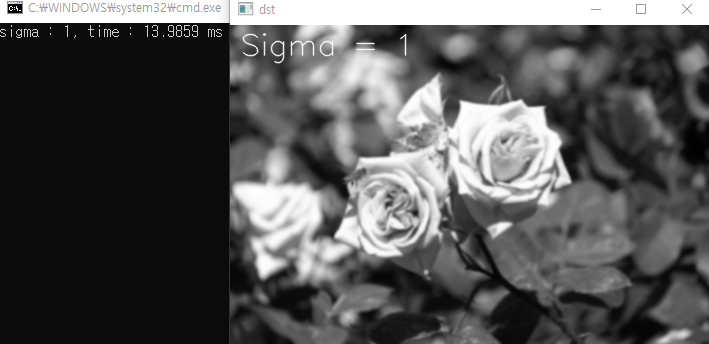
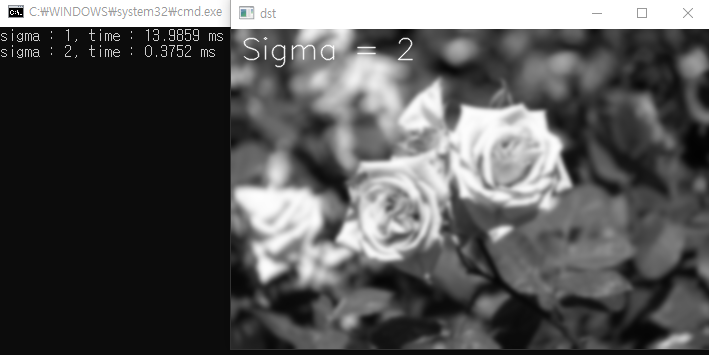
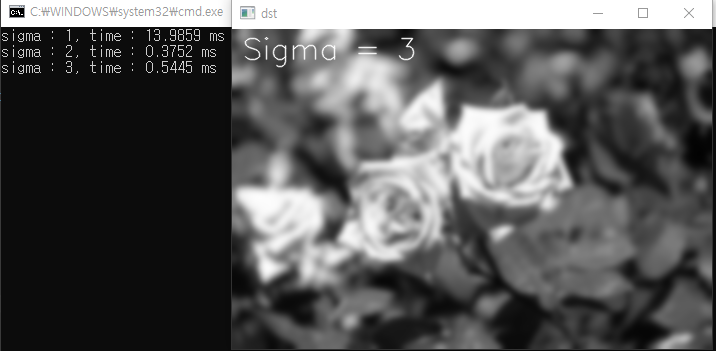
-
sigma 값이 커질수록 연산 시간이 늘어남
3. 샤프닝
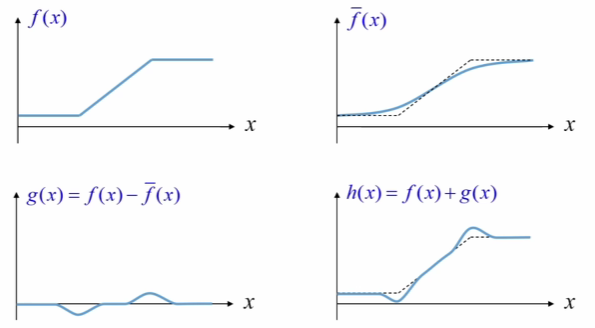
언샤프 마스크 필터링
- 날카롭지 않은 영상 , 즉 블러링된 영상을 이용하여 날카로운 영상을 생성
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
void sharpen_mean();
void sharpen_gaussian();
int main(void)
{
sharpen_mean();
sharpen_gaussian();
}
void sharpen_mean()
{
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
float sharpen[] = {
-1 / 9.f, -1 / 9.f, -1 / 9.f,
-1 / 9.f, 17 / 9.f, -1 / 9.f,
-1 / 9.f, -1 / 9.f, -1 / 9.f
};
Mat kernel(3, 3, CV_32F, sharpen);
Mat dst;
filter2D(src, dst, -1, kernel);
imshow("src", src);
imshow("dst", dst);
waitKey();
destroyAllWindows();
}
void sharpen_gaussian()
{
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
imshow("src", src);
Mat srcf;
src.convertTo(srcf, CV_32FC1);
for (int sigma = 1; sigma <= 5; sigma++) {
Mat blr;
GaussianBlur(srcf, blr, Size(), sigma);
float alpha = 1.0f;
Mat dst = (1.f + alpha) * srcf - alpha * blr;
dst.convertTo(dst, CV_8UC1);
String desc = format("sigma: %d", sigma);
putText(dst, desc, Point(10, 30), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(255), 1, LINE_AA);
imshow("dst", dst);
waitKey();
}
destroyAllWindows();
}-
실행 영상
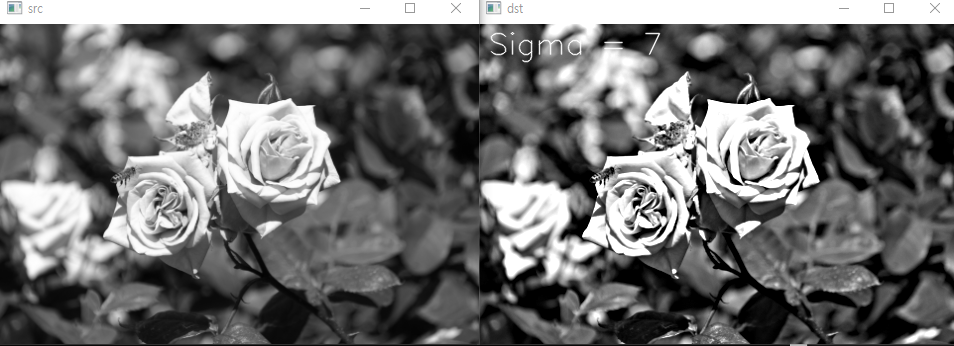
-
sigma 값이 클수록 샤프닝이 과하게 출력된다.
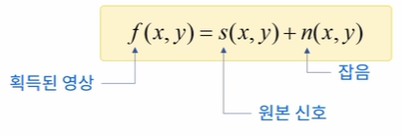
4. 영상의 잡음
- 영상의 픽셀 값에 추가되는 원치 않는 형태의 신호
- 카메라에서 광학 신호를 전기적 신호로 변환하는 과정에서 잡음이 추가될 수 있음
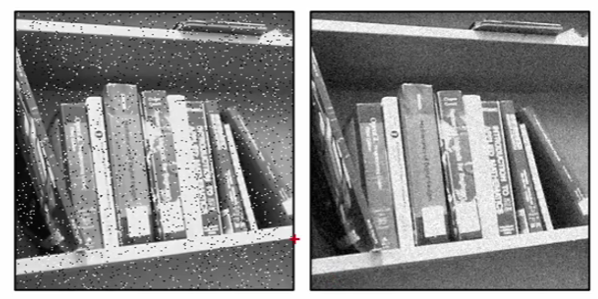
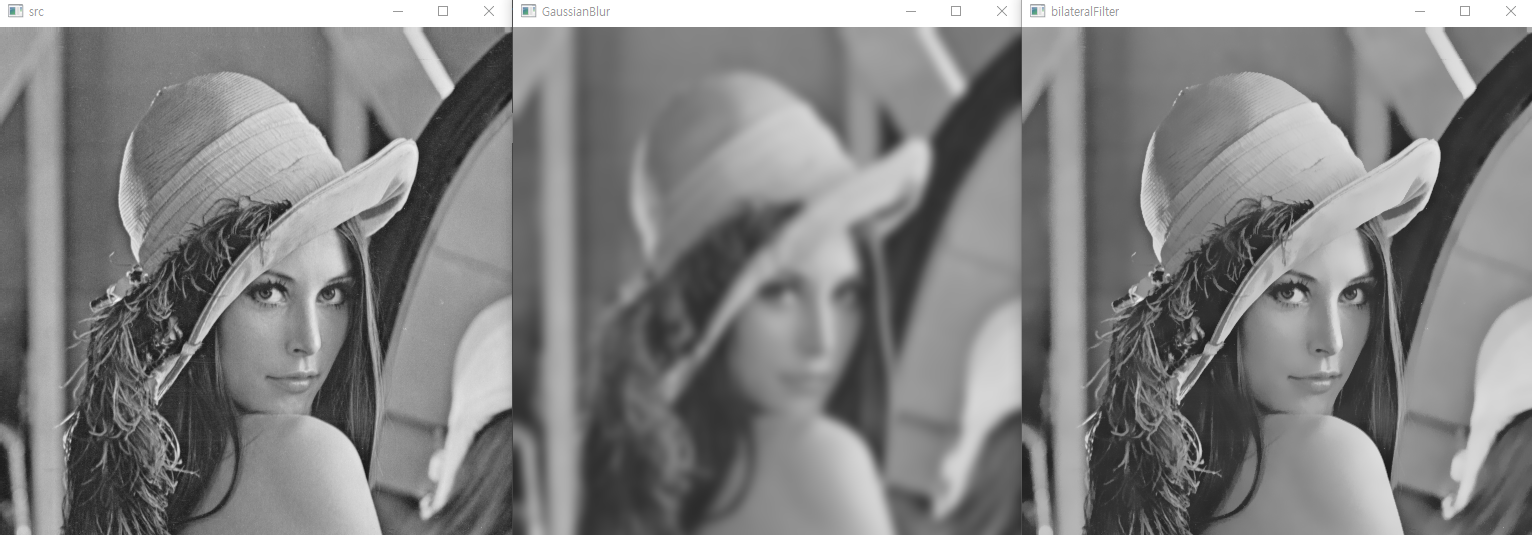
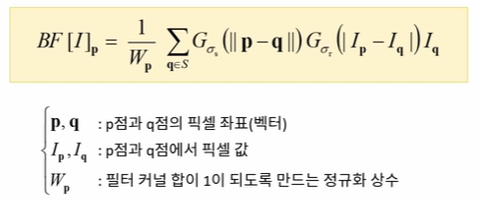
양방향 필터
-
에지 보전 잡음 제거 필터의 하나
-
평균 값 필터 또는 가우시안 필터는 에지 부근에서도 픽셀 값을 평탄하게 만드는 단점이 있음
-
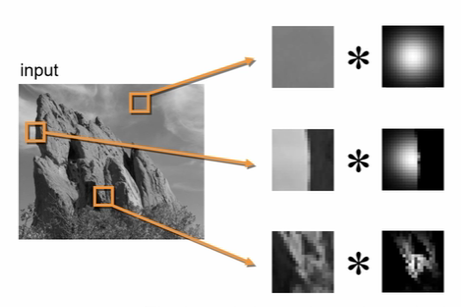
기준 픽셀과 이웃 픽셀과의 거리 그리고 픽셀 값의 차이를 함께 고려하여 블러링 정도를 조절
-
에지가 아닌 부분에서만 블러링
-
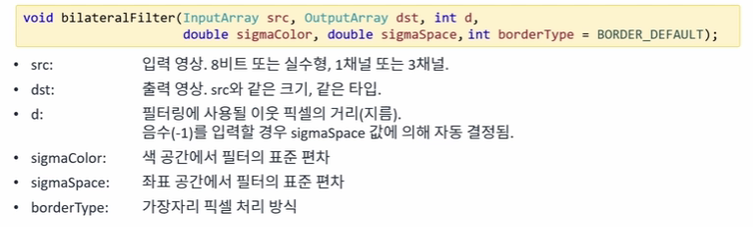
OpenCV 양방향 필터링 함수
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
int main(void)
{
Mat src = imread("lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
TickMeter tm;
tm.start();
Mat dst1;
GaussianBlur(src, dst1, Size(), 5);
tm.stop();
cout << "Gaussian: " << tm.getTimeMilli() << endl;
tm.reset();
tm.start();
Mat dst2;
bilateralFilter(src, dst2, -1, 10, 5);
tm.stop();
cout << "Bilateral: " << tm.getTimeMilli() << endl;
imshow("src", src);
imshow("dst1", dst1);
imshow("dst2", dst2);
waitKey();
}- 실행 결과