ESP32의 PIN MAP
ESP32_DEVKIT_V4 - ESP32_WROOM_32D Pin Map
ESP32의 D2, D3는 사용하지 말라고 명시되어 있다.
그렇기에, 이전에 사용하였던 번호인 16, 17번을 그대로 사용하려고 한다.
ESP32의 RX는 16으로 하며, TX는 17로 지정한다
연결 코드는 아래와 같다
#include "DFRobot_C4001.h"
//#define I2C_COMMUNICATION //use I2C for communication, but use the serial port for communication if the line of codes were masked
#ifdef I2C_COMMUNICATION
/*
* DEVICE_ADDR_0 = 0x2A default iic_address
* DEVICE_ADDR_1 = 0x2B
*/
DFRobot_C4001_I2C radar(&Wire ,DEVICE_ADDR_0);
#else
/* ---------------------------------------------------------------------------------------------------------------------
* board | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit | m0 |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X | vcc |
* GND | GND | GND | GND | GND | GND | X | gnd |
* RX | TX | Serial1 TX1 | 5 | 5/D6 | D2 | X | tx1 |
* TX | RX | Serial1 RX1 | 4 | 4/D7 | D3 | X | rx1 |
* ----------------------------------------------------------------------------------------------------------------------*/
/* Baud rate cannot be changed */
#if defined(ARDUINO_AVR_UNO) || defined(ESP8266)
SoftwareSerial mySerial(4, 5);
DFRobot_C4001_UART radar(&mySerial ,9600);
#elif defined(ESP32)
DFRobot_C4001_UART radar(&Serial1 ,9600 ,/*rx*/17 ,/*tx*/16); // GPIO 10:RX, GPIO 9:TX / D2=9 , D3=10
#else
DFRobot_C4001_UART radar(&Serial1 ,9600);
#endif
#endif
void setup()
{
Serial.begin(115200);
while(!Serial);
while(!radar.begin()){
Serial.println("NO Devices !");
delay(1000);
}
Serial.println("Device connected!");
// exist Mode
radar.setSensorMode(eExitMode);
sSensorStatus_t data;
data = radar.getStatus();
// 0 stop 1 start
Serial.print("work status = ");
Serial.println(data.workStatus);
// 0 is exist 1 speed
Serial.print("work mode = ");
Serial.println(data.workMode);
// 0 no init 1 init success
Serial.print("init status = ");
Serial.println(data.initStatus);
Serial.println();
/*
* min Detection range Minimum distance, unit cm, range 0.3~25m (30~2500), not exceeding max, otherwise the function is abnormal.
* max Detection range Maximum distance, unit cm, range 2.4~25m (240~2500)
* trig Detection range Maximum distance, unit cm, default trig = max
*/
if(radar.setDetectionRange(/*min*/30, /*max*/1000, /*trig*/1000)){
Serial.println("set detection range successfully!");
}
// set trigger sensitivity 0 - 9
if(radar.setTrigSensitivity(1)){
Serial.println("set trig sensitivity successfully!");
}
// set keep sensitivity 0 - 9
if(radar.setKeepSensitivity(2)){
Serial.println("set keep sensitivity successfully!");
}
/*
* trig Trigger delay, unit 0.01s, range 0~2s (0~200)
* keep Maintain the detection timeout, unit 0.5s, range 2~1500 seconds (4~3000)
*/
if(radar.setDelay(/*trig*/100, /*keep*/4)){
Serial.println("set delay successfully!");
}
// get confige params
Serial.print("trig sensitivity = ");
Serial.println(radar.getTrigSensitivity());
Serial.print("keep sensitivity = ");
Serial.println(radar.getKeepSensitivity());
Serial.print("min range = ");
Serial.println(radar.getMinRange());
Serial.print("max range = ");
Serial.println(radar.getMaxRange());
Serial.print("trig range = ");
Serial.println(radar.getTrigRange());
Serial.print("keep time = ");
Serial.println(radar.getKeepTimerout());
Serial.print("trig delay = ");
Serial.println(radar.getTrigDelay());
}
void loop()
{
// Determine whether the object is moving
if(radar.motionDetection()){
Serial.println("exist motion");
Serial.println();
}
delay(100);
}
위의 코드를 실행시키고 변형 시켜서 내가 출력하고자 하는 것들을 출력하면 된다.
2번째 energy, target_number
#include "DFRobot_C4001.h"
//#define I2C_COMMUNICATION //use I2C for communication, but use the serial port for communication if the line of codes were masked
#ifdef I2C_COMMUNICATION
/*
* DEVICE_ADDR_0 = 0x2A default iic_address
* DEVICE_ADDR_1 = 0x2B
*/
DFRobot_C4001_I2C radar(&Wire ,DEVICE_ADDR_0);
#else
/* ---------------------------------------------------------------------------------------------------------------------
* board | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit | m0 |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X | vcc |
* GND | GND | GND | GND | GND | GND | X | gnd |
* RX | TX | Serial1 TX1 | 5 | 5/D6 | D2 | X | tx1 |
* TX | RX | Serial1 RX1 | 4 | 4/D7 | D3 | X | rx1 |
* ----------------------------------------------------------------------------------------------------------------------*/
/* Baud rate cannot be changed */
#if defined(ARDUINO_AVR_UNO) || defined(ESP8266)
SoftwareSerial mySerial(4, 5);
DFRobot_C4001_UART radar(&mySerial ,9600);
#elif defined(ESP32)
DFRobot_C4001_UART radar(&Serial1 ,9600 ,/*rx*/16 ,/*tx*/17); // GPIO 10:RX, GPIO 9:TX / D2=9 , D3=10
#else
DFRobot_C4001_UART radar(&Serial1 ,9600);
#endif
#endif
void setup()
{
Serial.begin(115200);
while(!Serial);
while(!radar.begin()){
Serial.println("NO Devices !");
delay(1000);
}
Serial.println("Device connected!");
// speed Mode
radar.setSensorMode(eSpeedMode);
sSensorStatus_t data;
data = radar.getStatus();
// 0 stop 1 start
Serial.print("work status = ");
Serial.println(data.workStatus);
// 0 is exist 1 speed
Serial.print("work mode = ");
Serial.println(data.workMode);
// 0 no init 1 init success
Serial.print("init status = ");
Serial.println(data.initStatus);
Serial.println();
/*
* min Detection range Minimum distance, unit cm, range 0.3~20m (30~2500), not exceeding max, otherwise the function is abnormal.
* max Detection range Maximum distance, unit cm, range 2.4~20m (240~2500)
* thres Target detection threshold, dimensionless unit 0.1, range 0~6553.5 (0~65535)
*/
if (radar.setDetectThres(/*min*/ 11, /*max*/ 1200, /*thres*/ 10)) {
Serial.println("set detect threshold successfully");
}
// set Fretting Detection
radar.setFrettingDetection(eON);
// get confige params
Serial.print("min range = ");
Serial.println(radar.getTMinRange());
Serial.print("max range = ");
Serial.println(radar.getTMaxRange());
Serial.print("threshold range = ");
Serial.println(radar.getThresRange());
Serial.print("fretting detection = ");
Serial.println(radar.getFrettingDetection());
}
void loop() {
Serial.print("target number = ");
Serial.println(radar.getTargetNumber()); // must exist
Serial.print("target Speed = ");
Serial.print(radar.getTargetSpeed());
Serial.println(" m/s");
Serial.print("target range = ");
Serial.print(radar.getTargetRange());
Serial.println(" m");
Serial.print("target energy = ");
Serial.println(radar.getTargetEnergy());
Serial.println();
delay(100);
}
센서 설명
-
C4001 mmWave(millimeter-wave)는 정지 물체와 움직이는 물체를 모두 감지할 수 있다는 장점이 있다
-
상대적으로 강력한 간섭 방지 기능이 있어 온도 변화, 주변광 변화 및 환경 소음과 같은 요인에 덜 민감하다
-
사람이 앉아 있든, 잠을 자든, 움직이고 있든 센서는 빠르고 민감하게 사람의 존재를 감지할 수 있다
MMWave 와 Infrared Sensor(적외선 센서)의 차이
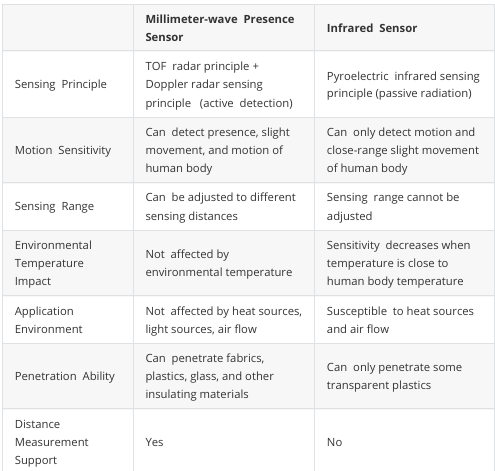
Distance and velocity detection
- 최대 감지 범위는 12m 이고 속도 측정 범위는 초당 0.1 ~ 10m 이다.
Characteristics
-
I2C 와 UART 두 가지 통신 방법을 지원한다
-
Human Detection : 최대 8m 거리에서 인간의 존재를 탐지하고, 최대 12m 거리에서 인간의 움직임을 감지할 수 있다
-
Distance Detection : 1.2m 에서 12m까지의 거리를 측정할 수 있다
-
Speed Detection : 0.1m/s 에서 10m/s 까지의 속도를 감지할 수 있다
-
Strong anti-interference capability : 눈, 안개, 온도, 습도, 먼지, 빛, 소음 등의 요인에 영향을 받지 않는다
Installation Method
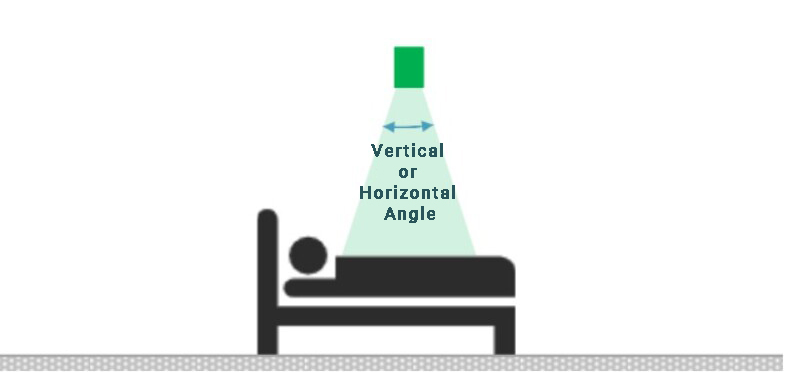
: mmWave Sensor는 설치 방법에 민감하며, 부적절한 설치는 센서의 성능과 기능에 영향을 미칠 수 있다. 이 모듈에 일반적으로 사용되는 설치 방법에는 상단 설치, 하단 설치, 수평 설치 및 하향 기울기 설치가 있다
Top Installation(상단 설치)
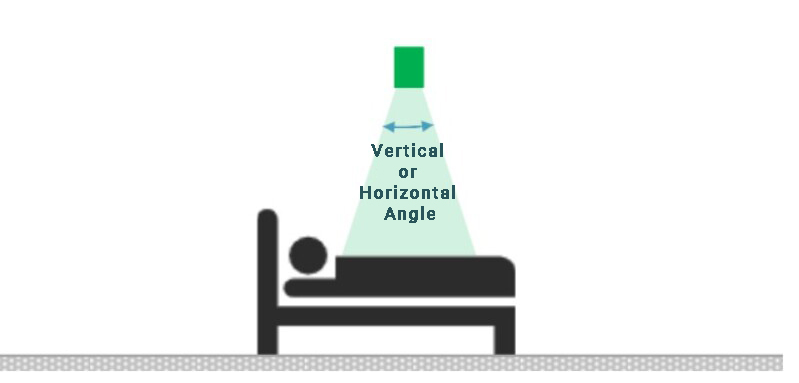
Bottom Installation(하단 설치)
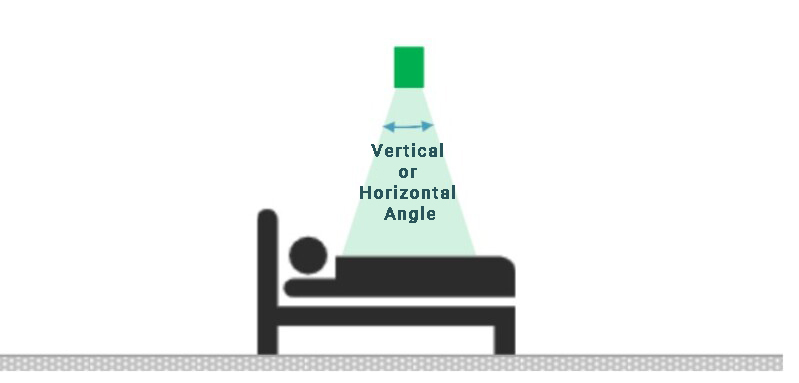
Horizontal Installation(수평 설치)
참고문헌