ROS
1.ubuntu 18.04 ros-melodic install

This post is written for ubuntu 18.04, ros-melodicIf your ubuntu version is 16.04, ros-version is kineticor your ubuntu version is 20.04, ros-version
2.ROS parameter
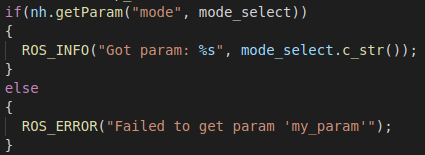
Set parameters name like upper picture ("mode"), and if write parameter name inside of <node> in launch file,the parameter is different.Need to set
3.ROS msg list for navigation (updating)
geometry_msgs/Twistfor velocity controlgeometry_msgs/Vector3 linear (m/s)geometry_msgs/Vector3 angular (rad/s)geometry_msgs/PoseWithCovariancegeometry
4.ubuntu 18.04 ros-melodic install
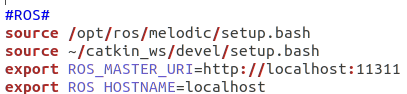
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt install curl
5.ROS RPY(euler) to orientation
6.ros coordinate transform using tf
In this article, we use ros_tf header to transform coordinate odom to mapYou can set initial pose with changing setOrigin or setRotation
7.robot state publisher in noetic
In melodic or lower<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />In noetic<node name="robot_state_publ
8.rtabmap with D455 alias
alias rtabmap_d455='cd ~/capstone_ws/ && source devel/setup.bash && rospack find realsense2_camera && roslaunch realsense2_camera d455_rtabmap.launch'
9.ros-noetic install in ubuntu20.04
This post is written for ubuntu 18.04, ros-melodicIf your ubuntu version is 16.04, ros-version is kineticor your ubuntu version is 20.04, ros-version