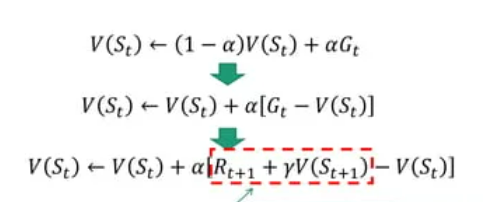
1. Temporal-Difference(TD) Learning
-
다음 State의 추정치(V(S_t+1))로 현재 State의 추정값(V(S_t))을 업데이트
-
TD(0): 주어진 Policy 평가
-
MC vs TD
- MC: full sequence of state 요구
- TD: only a step으로만 Learning 가능
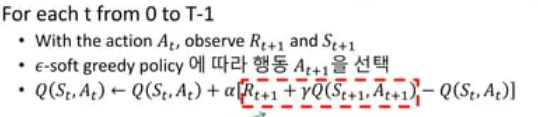
2. SARSA
-
value function 대신에 Q function(action-value fun)을 바로 학습
-
알고리즘
- 첫 state(S_0) 임의로 샘플링
- epsilon-soft greedy policy에 따라 행동 A0 선택
3. Q-Learning
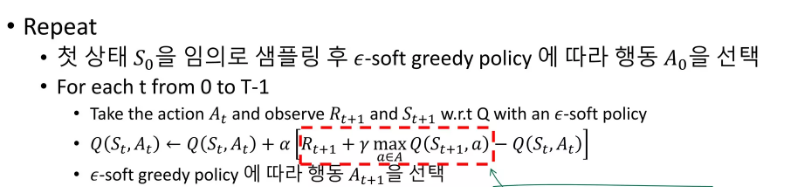
-> SARSA와 Target이 다름
4. Gym
- 강화학습 알고리즘을 개발, 비교하기 위한 오픈 소스 Python 라이브러리
- 고전 게임을 기반으로 강화학습을 사용할 수 있는 기본적인 환경과 기본적인 강화학습 알고리즘들이 패키지로 준비되어 있는 Toolkit
-
API
1) env.reset() : 초기화
2) env.step(action): 주어진 action 실행, 리턴
3) env.render(): render ANSI text, image -
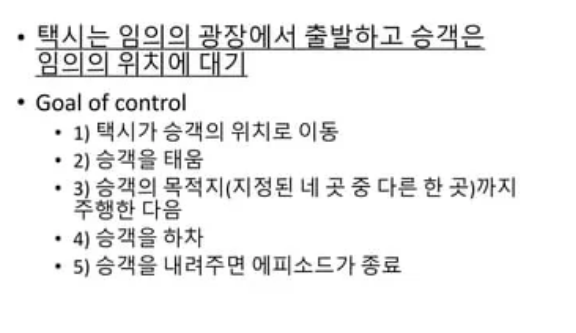
실습: Taxi Problem
# gym 설치
!pip install gym[atari,toy_text,accept_rom_license]
import numpy as np
import random
import gym
env = gym.make('Taxi-v3', new_step_api=True)
# step types
STEPTYPE_FIRST = 0
STEPTYPE_MID = 1
STEPTYPE_LAST = 2
Q = np.random.uniform(size=(500, 6))
# 환경의 첫 상태로 초기화
env.reset()
# action 0 수행
env.step(0)# wrapper for gym's blackjack environment
def generate_start_step():
return { 'observation': env.reset(), 'reward': 0., 'step_type': STEPTYPE_FIRST }
def generate_next_step(step, action):
obs, reward, done, _, info = env.step(action)
step_type = STEPTYPE_LAST if done else STEPTYPE_MID
return { 'observation': obs, 'reward': reward, 'step_type': step_type }
epsilon = 0.1
def get_eps_soft_action(step):
# epsilon-soft greedy policy
if random.random() < epsilon:
return np.random.choice(6, 1)[0]
else:
observ = step['observation']
return np.argmax(Q[observ])
def get_greedy_action(step):
observ = step['observation']
return np.argmax(Q[observ])
def get_random_action(step):
return random.randint(0, env.action_space.n-1)
behavior_prob_hit = 1. / float(env.action_space.n)
# return true if (observ, action) exists in epi
def in_episode(epi, observ, action):
for s, a in zip(*epi):
if s['observation'] == observ and a == action:
return True
return False- episode 생성
def generate_episode(policy_func=get_random_action):
episode = list()
actions = list()
frames = list()
step = generate_start_step()
frames.append(env.render(mode='ansi'))
episode.append(step)
while step['step_type'] != STEPTYPE_LAST:
action = policy_func(step)
step = generate_next_step(step, action)
frames.append(env.render(mode='ansi'))
episode.append(step)
actions.append(action)
return episode, actions, frames- 학습
from IPython.display import clear_output
from time import sleep
def print_frames(frames):
for i, frame in enumerate(frames):
clear_output(wait=True)
print(frame)
sleep(.2)
maxiter = 100000
gamma = 1
epsilon = 0.3
lr_rate = 0.8
Q = np.random.uniform(size=(env.observation_space.n, env.action_space.n))
for _ in range(maxiter):
# starting step
step = generate_start_step()
action = get_random_action(step)
done = False
while not done:
next_step = generate_next_step(step, action)
if next_step['step_type'] == STEPTYPE_LAST:
state = step['observation']
idx1 = (state, action)
Q[idx1] = Q[idx1] + lr_rate * (next_step['reward'] - Q[idx1])
done = True
else:
best_action = get_greedy_action(next_step)
state = step['observation']
next_state = next_step['observation']
idx1 = (state, action)
idx2 = (next_state, best_action)
Q[idx1] = Q[idx1] + lr_rate * ((next_step['reward'] + gamma * Q[idx2]) - Q[idx1])
next_action = get_eps_soft_action(step)
step = next_step
action = next_action
5. Custom Gym Environments
- 실습: shooting
