ROS2 Robot Operating System
1.ROS2 독학 시작
내가 로봇쪽으로 진로를 키울줄이야 진짜 꿈에도 몰랐다...물론 상황에 맞추면서 진로를 설정하였지만 그래도 늘 꿈에 그리던 로봇 엔지지니어... 첫 시작이다 가주아아아앙
2.ROS 2 설치하기
ROS? ROS - Robot Operating System 한줄 요약으로 로봇 개발을 위한 Tool이다. ROS는 로봇 애플리케이션을 구축하는데 도움이 되는 소프트웨어 라이브러리 및 도구이다. 드라이버부터 SOTA(state-of-the-art algorithm
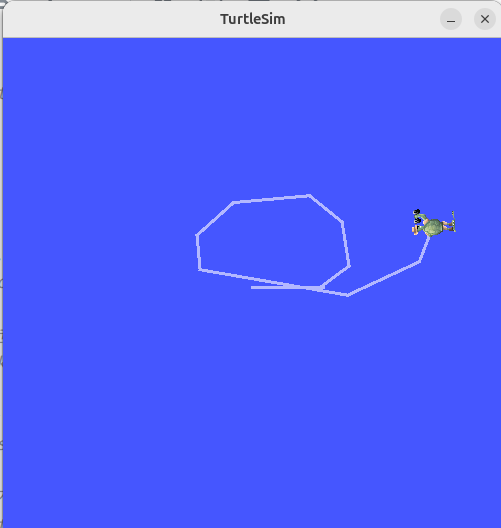
3.ROS 2의 Turtlesim
간단한 Turtlesim 예제로 ROS 특징 알아보기
4.ROS2와 DDS (Data Distribution Service)
프로그램의 재사용성을 극대화 하기 위하여 최소 단위의 실행 가능한 프로세스를 노드라고 정의하나의 실행 가능한 프로그램이라고 생각하면 됨하나 이상의 노드 또는 노드 실행을 위한 정보 등을 묶어 놓은 것을 패키지라고 하며 패키지의 묶음은 메타패키지라고 부름수많은 노드들이
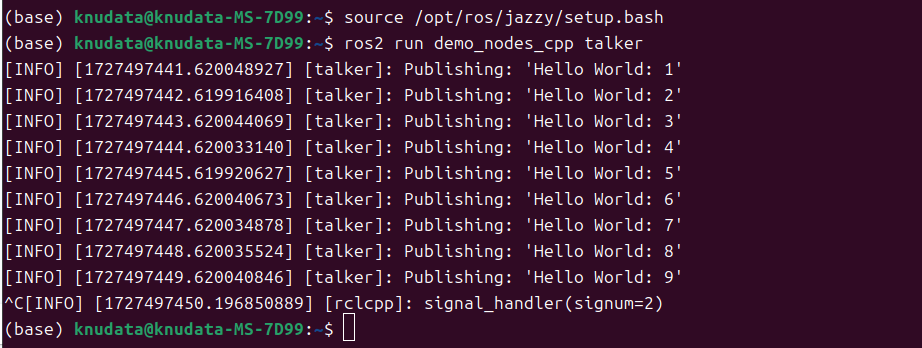
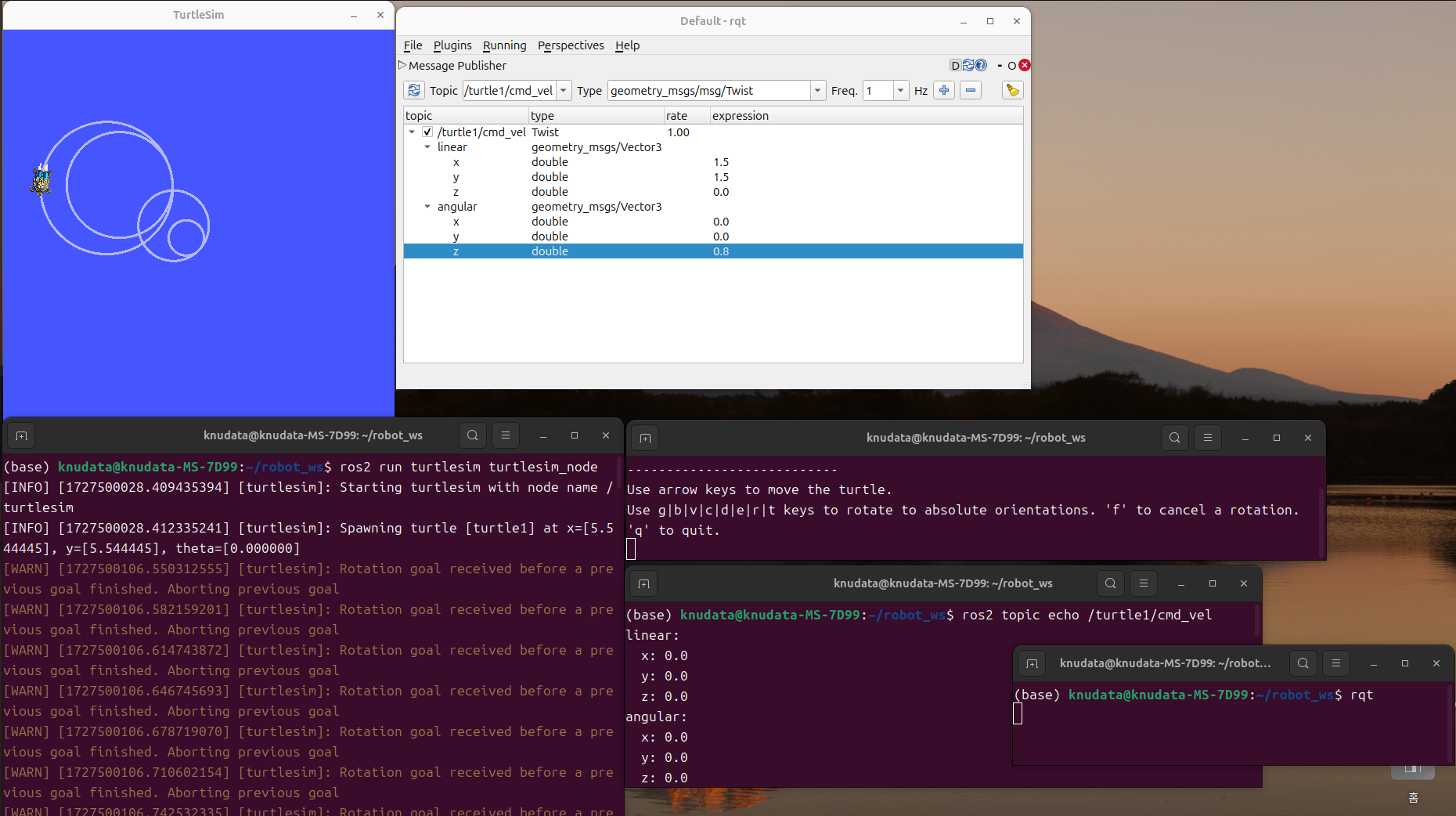
5.ROS 2 패키지 설치와 노드 실행
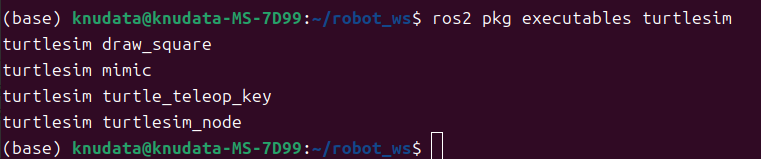
turtlesim 패키지에 포함된 실행 가능한 모든 노드들을 보여줌키보드를 통해서 거북이 컨트롤 가능마우스를 가져가면 색깔이 바뀜 (빨간색, 파란색, 녹색)노드/turtlesim(녹색) : turtlesim 시뮬레이션 노드/teleop_turtle(파란색) : 키보드
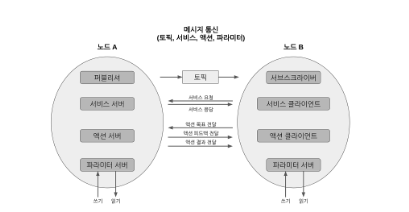
6.ROS 2 노드와 메시지 통신
노드(node)와 메시지 통신 (message comunication) 노드 node node는 아래 그림처럼 A,B,C라는 노드가 있을때 노드들은 서로 유기적으로 Message로 연결되어 사용 수행하고자 하는 task가 많아질수록 노드가 늘어나며 시스템을 확장시
7.ROS 2 토픽 Topic
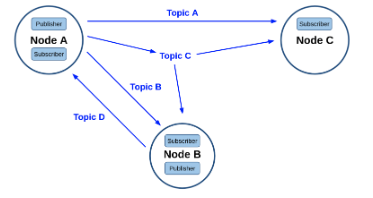
Noda A 처럼 하나 이상의 토픽을 발행할 수 있으며 'Publisher' 기능과 동시에 토픽을 구독하는 'Subscriber' 역할도 동시에 수행할 수 있음.ROS 프로그래밍시에 70% 이상이 토픽으로 사용될 정도로 통신 방식 중에 가장 기본이 되며 가장 널리쓰이는
8.ROS 2 ROS interface 란?

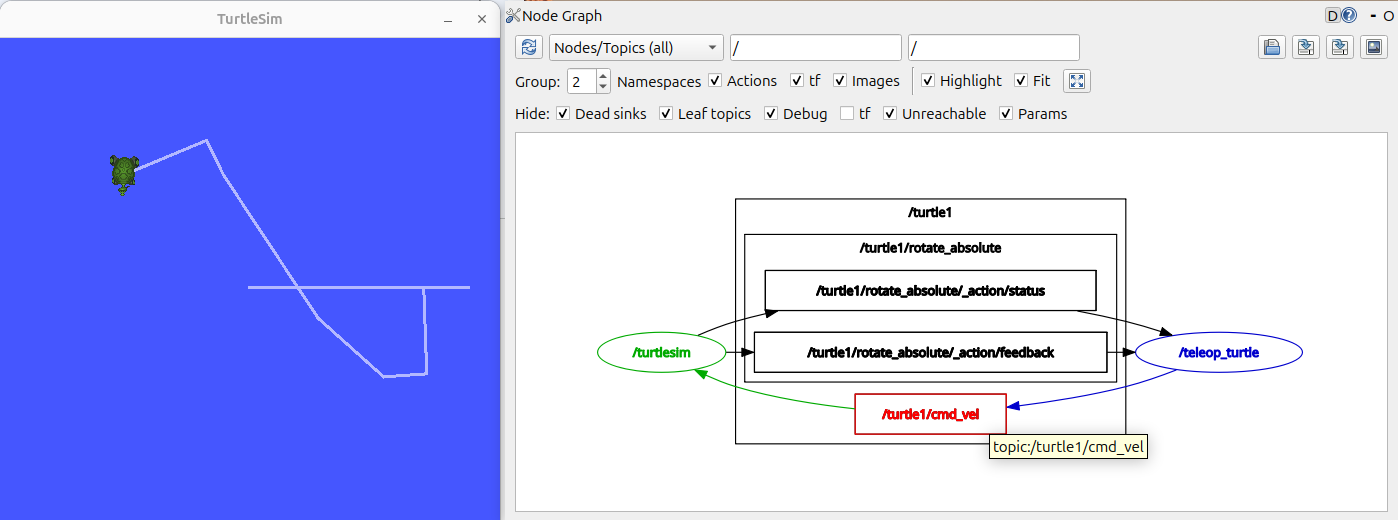
ROS 노드간에 데이터를 주고받을 때에는 토픽, 서비스, 액션이 사용되는데 이 때 사용되는 데이터 형태를 ROS interface라고 함토픽은 고유의 인터페이스를 가지는데 이를 message interface라고 부르며 파일로는 msg파일을 뜻함위 예제에서 /turtl
9.ROS 2 서비스 Service
그림과 같이 동일 서비스에 대해 복수의 클라이언트를 가질 수 있도록 설계됨.Node C의 Service Client가 Node B의 Service Server에게 서비스 요청을 하였다면 Node B의 Service Server는 요청받은 서비스를 수행한 후 Node C
10.ROS 2 Action
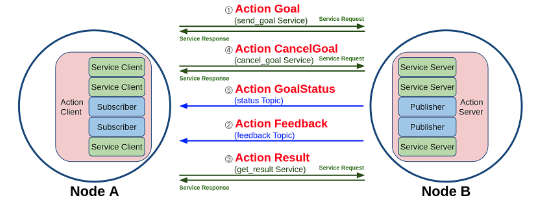
액션이란?다소 시간이 걸릴 수 있는 작업이 처리되는 동안 피드백과 업데이트를 제공로봇을 목표로 이동하거나 복잡한 계산을 수행하는 등 시간이 오래 걸리는 작업에 유용구성요소 (해당 그림에서는 클라이언트 측에 3개의 서비스 클라이언트와 2개의 토픽 구독자, 서버 측에 2개