Turtlesim 패키지 설치와 노드
$ sudo apt update
$ sudo apt install ros-jazzy-turtlesim
# 설치한 패키지 확인 가능
$ ros2 pkg list$ ros2 pkg executables turtlesim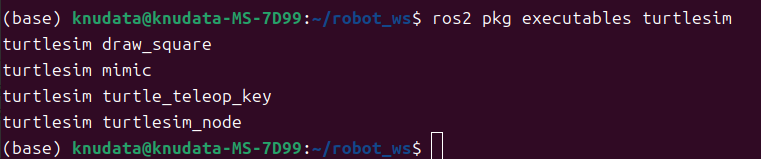
turtlesim 패키지에 포함된 실행 가능한 모든 노드들을 보여줌
$ ros2 run turtlesim turtlesim_node
$ ros2 run turtlesim turtle_teleop_key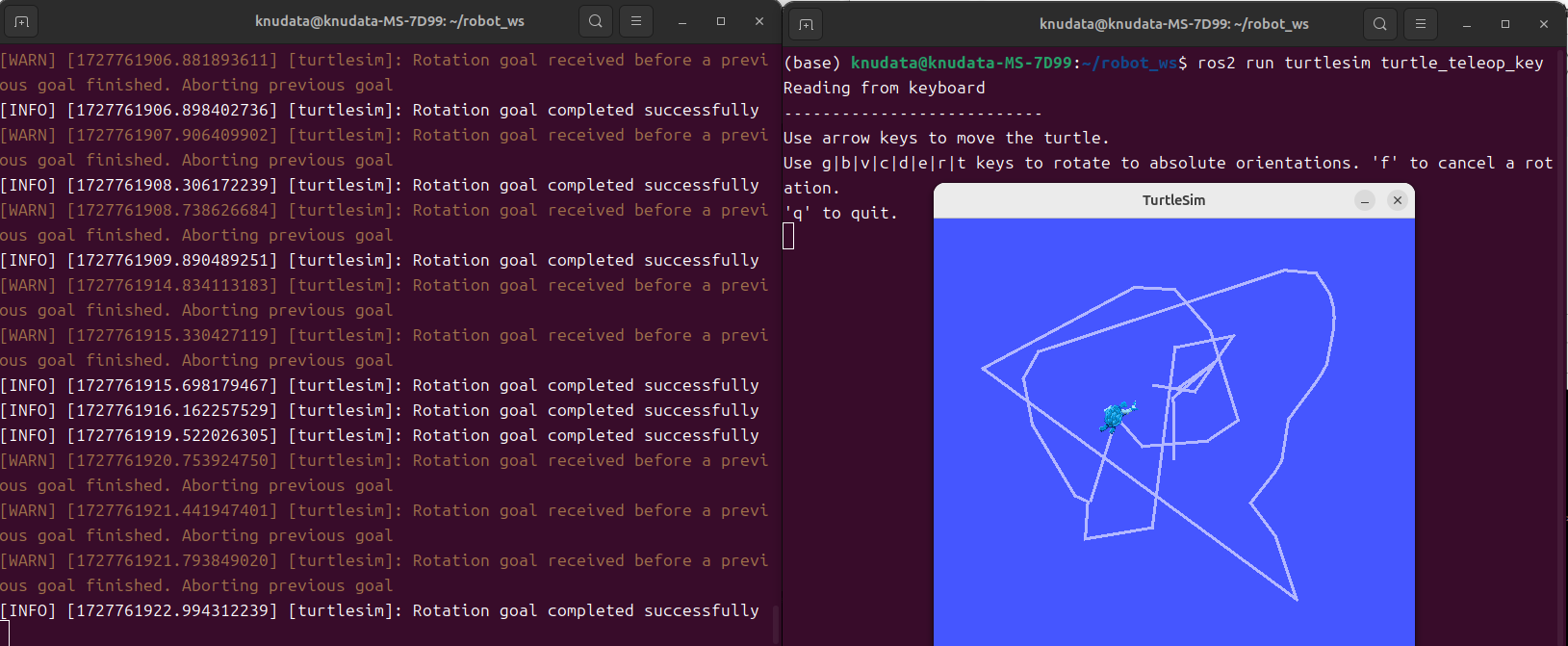
키보드를 통해서 거북이 컨트롤 가능
$ rqt_graph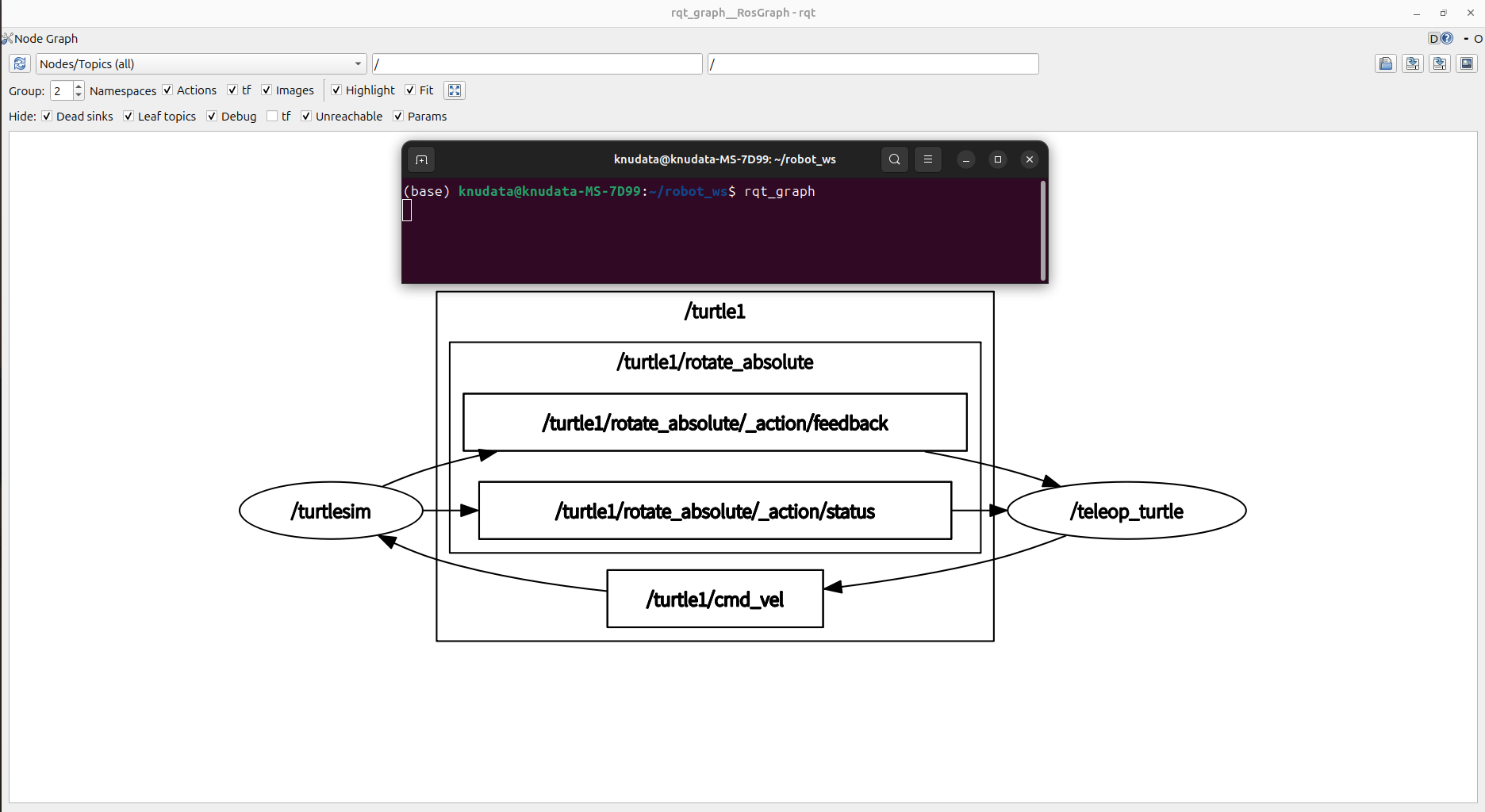
마우스를 가져가면 색깔이 바뀜 (빨간색, 파란색, 녹색)
-
노드
- /turtlesim(녹색) : turtlesim 시뮬레이션 노드
- /teleop_turtle(파란색) : 키보드 제어 노드
-
토픽과 액션
-
/turtle1/cmd_vel(빨간색) : 거북이의 속도 병령을 전달하는 토픽
-
turtle1/rotate_absolute : 거북이의 절대 각도를 회전시키는 액션
- /action/status : 액션 상태 정보
- /action/feedback : 액션 실행 중 피드백 정보
-
-
통신 흐름
- /teleop_turtle에서 /turtle1/cmd_vel로 향하는 화살표 : 키보드 입력이 속도 병령으로 변환되어 turtlesim으로 전송
- /turtlesim과 /teleop_turtle 사이의 양방향 화살표 : rotate_absolute 액션의 요청, 상태, 피드백 교환
-
구조 해석
- /turtle :시뮬레이션 내 거북이 인스턴스를 나타냄
- 중첩된 박스 : 액션과 관련 토픽들의 계층 구조 표현
이 그래프는 다음과 같은 정보를 제공
- 어떤 노드들이 실행중이며 어떻게 연결되어 있는지 보여줌
- 노드 간에 어떤 정보가 어떤 방식으로 교환되는지 시각화
- rotate_absolute 액션의 내부 구조와 관련 토픽들을 보여줌
- 시스템의 연결 상태를 쉽게 확인할 수 있어 문제 진단에 유용함

데이터사이언스정복