Blob
Blob은 이미지 내에서 주변보다 더 밝거나 어두운 영역을 의미한다.
Blob을 찾아내기 위해 DFS 알고리즘을 사용했다.
즉, 이미지 픽셀들을 방문하면서 블롭이 발견되면 1씩 추가하는 간단한 방식이다.
블롭 검출의 가중치는 다음 2차원 배열을 사용했다.
vector<vector<pair<int, int>>> blobs;
int dx[] = { -1, 0, 1, 0, -1, -1, 1, 1 };
int dy[] = { 0, 1, 0, -1, -1, 1, -1, 1 };이렇게 하면 x, y의 기준은 0,0이므로 x가 -1, y가 0이면 좌로 1칸 이라는 뜻이다.
즉, 8칸으로 상하좌우 대각선을 모두 체크할 수 있다.
void CImageDlg::OnBnClickedButtonBlobdetect()
{
// TODO: 여기에 컨트롤 알림 처리기 코드를 추가합니다.
if (m_result == nullptr) {
AfxMessageBox(_T("이미지를 먼저 로드해주세요."));
return;
}
int height = IMAGE_HEIGHT;
int width = IMAGE_WIDTH;
bool **visited = new bool*[height];
for (int i = 0; i < height; i++) {
visited[i] = new bool[width];
fill_n(visited[i], width, false);
}
vector<vector<pair<int, int>>> blobs;
int dx[] = { -1, 0, 1, 0, -1, -1, 1, 1 };
int dy[] = { 0, 1, 0, -1, -1, 1, -1, 1 };
for (int y = 0; y < height; y++) {
for (int x = 0; x < width; x++) {
if (m_result[y * width + x] && !visited[y][x]) {
vector<pair<int, int>> blob;
stack<pair<int, int>> s;
s.push({ y, x });
visited[y][x] = true;
while (!s.empty()) {
pair<int, int> p = s.top();
s.pop();
blob.push_back(p);
for (int k = 0; k < 8; k++) {
int newY = p.first + dy[k];
int newX = p.second + dx[k];
if (newY >= 0 && newY < height && newX >= 0 && newX < width && m_result[newY * width + newX] && !visited[newY][newX]) {
s.push({ newY, newX });
visited[newY][newX] = true;
}
}
}
blobs.push_back(blob);
}
}
}
for (int i = 0; i < height; i++)
delete[] visited[i];
delete[] visited;
CString message;
message.Format(_T("Blob count: %d"), blobs.size());
AfxMessageBox(message);
}
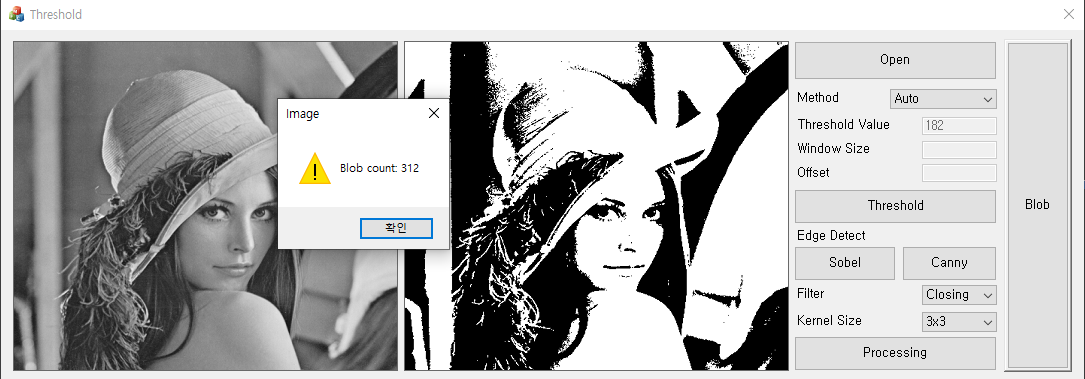
그럼 최종적으로 완성된 MFC 화면을 보자.
1. Auto Threshold
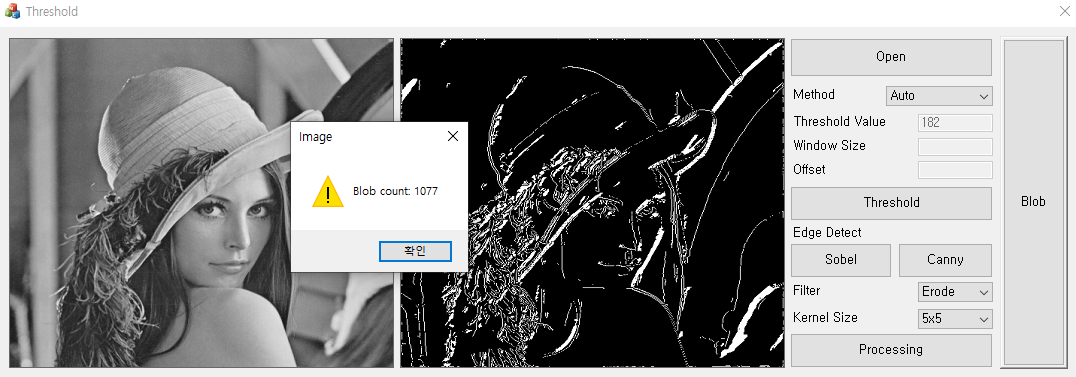
2. Auto Threshold + Erode 5x5

3. Canny Edge Detection
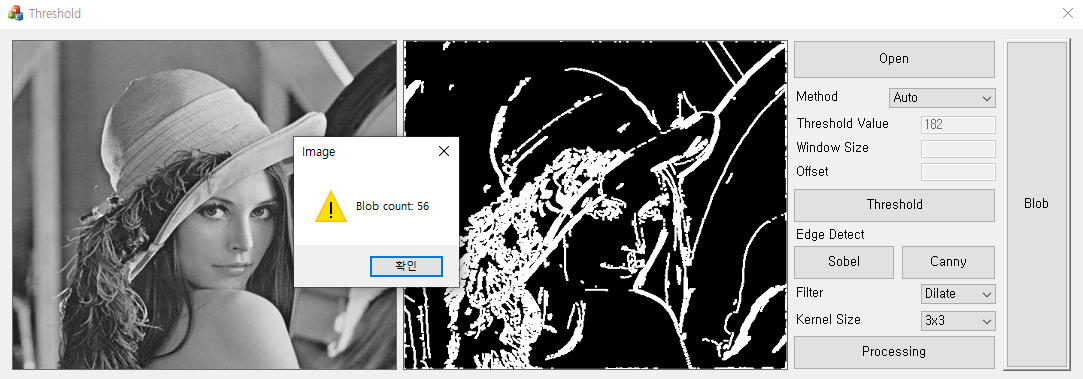
4. Canny Edge Detection + Dilate 3x3

개인 저장용. 오류 매우 많음.