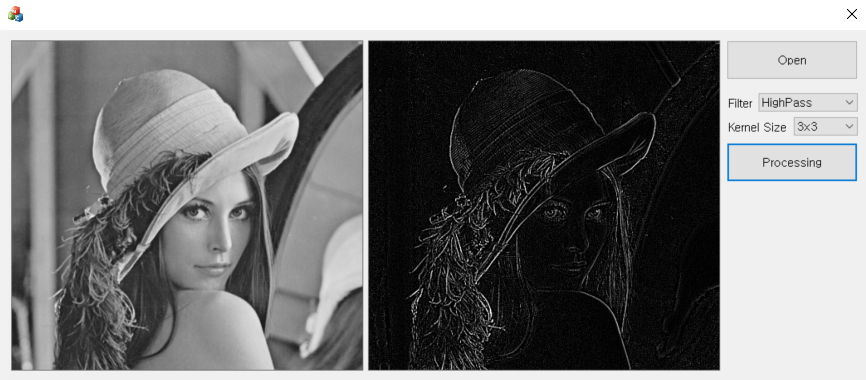
Highpass 필터는 고주파는 통과, 저주파는 차단시키는 필터이다.
이웃과의 화소 값 변화를 보기 떄문에 미분을 이용하며, 따라서 이미지의 Edge를 검출하는데 쓰인다.
즉, 물체의 경계를 표시해주는 역할을 한다.
또한 이미지를 선명화 처리해 영상 내 미세하고 섬세한 부분을 강조하고, 모호한 부분을 개선하는 필터이다.
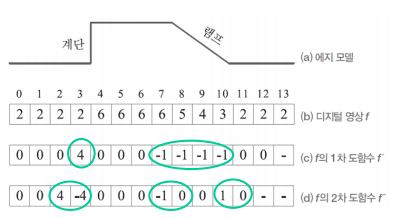
Edge를 검출하기 위해서는 미분을 사용하여, 화소값의 변화가 큰 부분을 찾아내 검출한다.
void CImageDlg::HighPassFilter()
{
// 이미지가 로드되지 않았으면 반환
if (m_original == nullptr)
return;
// 결과를 저장할 임시 이미지 생성
BYTE* temp = new BYTE[IMAGE_SIZE];
memcpy(temp, m_original, IMAGE_SIZE);
// 필터 크기 설정
int pad = filterSize / 2;
// 각 픽셀에 대해
for (int y = pad; y < IMAGE_HEIGHT - pad; y++) {
for (int x = pad; x < IMAGE_WIDTH - pad; x++) {
int sum = 0;
if (filterSize == 3) {
// 필터 적용
for (int i = -pad; i <= pad; i++) {
for (int j = -pad; j <= pad; j++) {
if (i == 0 && j == 0)
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)] * 8;
else
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)] * -1;
}
}
}
else if (filterSize == 5) {
// 필터 적용
for (int i = -pad; i <= pad; i++) {
for (int j = -pad; j <= pad; j++) {
if (i == 0 && j == 0)
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)] * 24;
else
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)] * -1;
}
}
}
// 필터 적용 결과의 최대 최소 설정
if (sum < 0) sum = 0;
if (sum > 255) sum = 255;
// 결과를 임시 이미지에 저장
temp[y * IMAGE_WIDTH + x] = sum;
}
}
// 결과를 m_filtered에 복사
memcpy(m_filtered, temp, IMAGE_SIZE);
delete[] temp; // 할당 해제
}이 코드는 예를들어 3 x 3 마스크의 경우 중앙에는 8의 가중치를, 가장자리에는 -1의 가중치를 두어 고주파 영역, 즉 노이즈가 두드러지게 한다.
픽셀에 따라 자동으로 중심 픽셀의 가중치를 구현하려면 다음과 같이 하면 되겠다.
// 필터 적용
for (int i = -pad; i <= pad; i++) {
for (int j = -pad; j <= pad; j++) {
if (i == 0 && j == 0)
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)] * (filterSize * filterSize);
else
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)] * -1;
}
}장단점
고주파 필터는 이미지에서 높은 주파수 성분, 즉 세밀한 부분과 경계선을 강조하는 특징이 있다. 장점으로는 세밀한 부분이나 경계선을 뚜렷하게 만들 수 있다는 점이 있지만 단점으로는 이미지 내의 노이즈도 함께 강조할 수 있다.

개인 저장용. 오류 매우 많음.