

[[Highpass]] 필터와는 다르게 저주파 필터는 고주파는 거르고, 저주파는 통과시키는 필터이다.
일반적인 데이터에서 노이즈는 고주파에 해당되고, 우리가 원하는 데이터는 저주파에 해당되기 떄문에 저주파 필터를 통해 노이즈를 필터링할 수 있기 때문에 노이즈 제거에 사용된다.
저주파 필터를 RC 회로로 구현하면 다음과 같다.
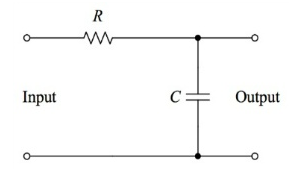
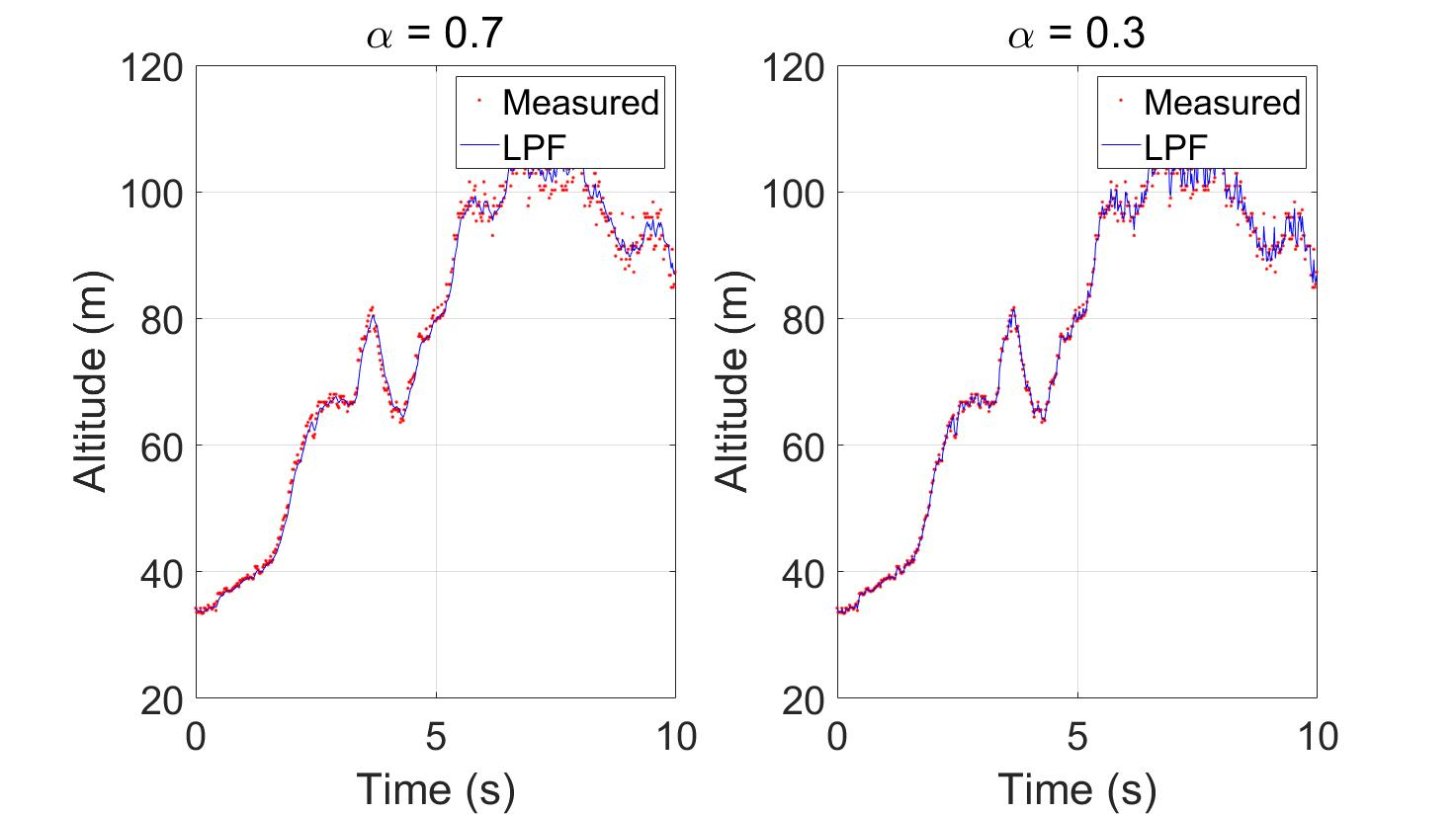
저주파 필터의 값이 커질수록 측정값에 더 민감해지고, 작아지면 잡음 제거에 더 민감해진다
저주파 필터는 [[Gaussian Filter]]를 활용한다.
가우시안 필터의 표준편차가 클 수록 대상 점에서 멀어질수록 값이 작아지는 정도가 크기 때문에 블러링 효과는 커진다. 반대로 표준편차가 작을 수록 대상 점에서 멀어질수록 값이 작아지는 정도가 작기 때문에 블러링 효과는 작아진다.
이를 코드로 구현해보자.
1. 평균 필터
void CImageDlg::LowPassFilter()
{
// 이미지가 로드되지 않았으면 반환
if (m_original == nullptr)
return;
// 결과를 저장할 임시 이미지 생성
BYTE* temp = new BYTE[IMAGE_SIZE];
memcpy(temp, m_original, IMAGE_SIZE);
// 필터 크기 설정
int pad = filterSize / 2;
// 각 픽셀에 대해
for (int y = pad; y < IMAGE_HEIGHT - pad; y++) {
for (int x = pad; x < IMAGE_WIDTH - pad; x++) {
int sum = 0;
int count = 0;
// 필터 적용
for (int i = -pad; i <= pad; i++) {
for (int j = -pad; j <= pad; j++) {
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)]; // 주변 픽셀들의 값을 다 더함
count++; // 픽셀의 수 카운트
}
}
// 평균값 계산
BYTE average = sum / count; // 주변 픽셀들의 총합을 픽셀 수로 나눠서 평균
// 결과를 임시 이미지에 저장
temp[y * IMAGE_WIDTH + x] = average;
}
}
// 결과를 m_filtered에 복사
memcpy(m_filtered, temp, IMAGE_SIZE);
delete[] temp; // 할당 해제
}평균 필터에서는 주변 픽셀들의 값을 다 더하여 그 총합을 픽셀 수로 나누고, 그 평균을 저장한다.
2. 가우시안 필터
이 평균 필터에 가우시안 커널을 곱하여 가중치를 적용함으로써 가우시안 필터를 구현할 수 있다.
double gaussianKernel[3][3] = {
{1.0 / 16, 2.0 / 16, 1.0 / 16},
{2.0 / 16, 4.0 / 16, 2.0 / 16},
{1.0 / 16, 2.0 / 16, 1.0 / 16}
}; // 가우시안 커널 정의. 중심에 가까운 값에 더 큰 가중치 부여
double sum = 0; // 가중치를 적용한 픽셀 값의 총합을 저장할 변수
// 필터 적용
for (int i = -1; i <= 1; i++) { // y축 방향으로 1픽셀씩 이동
for (int j = -1; j <= 1; j++) { // x축 방향으로 1픽셀씩 이동
sum += m_original[(y + i) * IMAGE_WIDTH + (x + j)] * gaussianKernel[i + 1][j + 1]; // 커널에 정의된 가중치를 적용하여 픽셀 값 더함
}
}
BYTE average = round(sum); // 가중치를 적용한 픽셀 값의 총합을 반올림하여 평균을 구함
장단점
저주파 필터는 이미지에서 낮은 주파수 성분, 즉 부드러운 부분과 대략적인 형태를 강조하는 특징이 있다. 장점으로는 노이즈를 잘 제거하고 이미지를 부드럽게 만들 수 있다는 점이 있고, 단점으로는 세밀한 부분이나 경계선을 흐리게 만들 수 있다는 점이있다.

개인 저장용. 오류 매우 많음.