tereo Camera Calibration을 하기 전에 Steroe Vision을 통해 기반을 다졌다.
**1. Stereo Matching
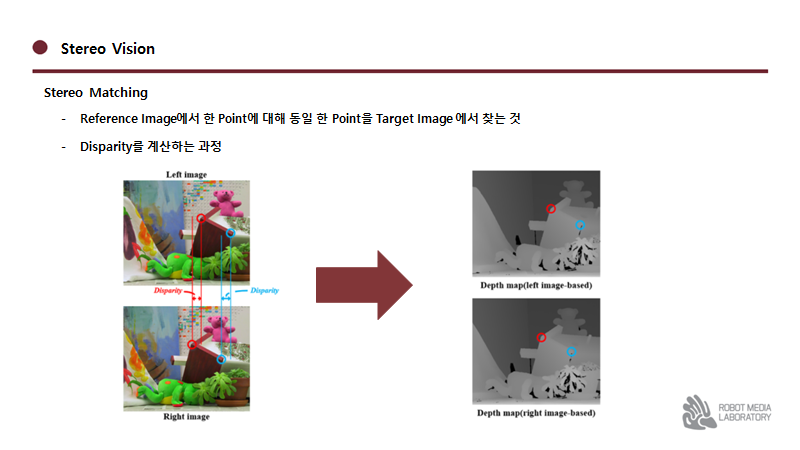
Stereo Matching은 왼쪽 Image와 오른쪽 Image 사이의 Disparity을 구하는 과정이다.
Stereo Matching은 Global Matching 과 Local Matching이 존재하고 특징은 위와 같다.
그래서 나는 Local Matching중에서 SAD와 SSD을 공부했다. 그리고 해당 기법을 Python의 OpenCV를 통해서 구현했다.
**2. SAD(Sum of Absolute Difference)

SAD는 차이의 절대값을절댓값을 더한 것으로 Sum of Absolute Difference이다. 차이에 절댓값을 취하고 Matching Cost을 계산했다.
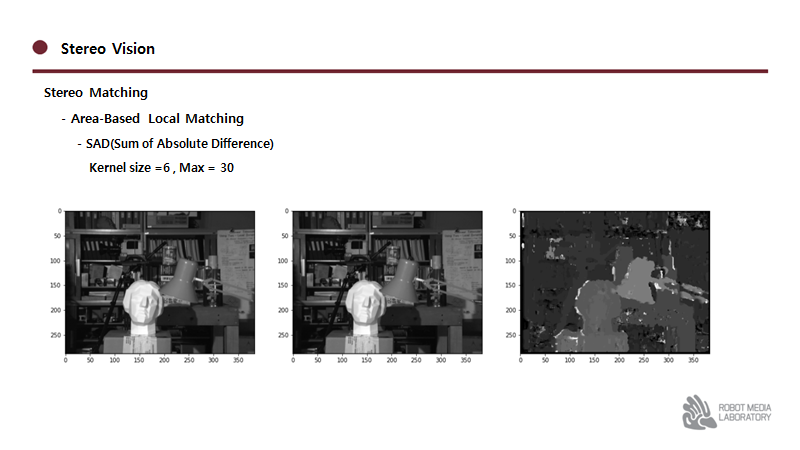

위는 SAD을 구현한 결과이다.
**3. SSD(Sum of Squared Difference)

다음으로 구현한 것은 SSD이다. SSD는 Sum of Squared Difference로 차이에 제곱을 취한 후 합산하여 Matching Cost을 계산하는 기법이다.
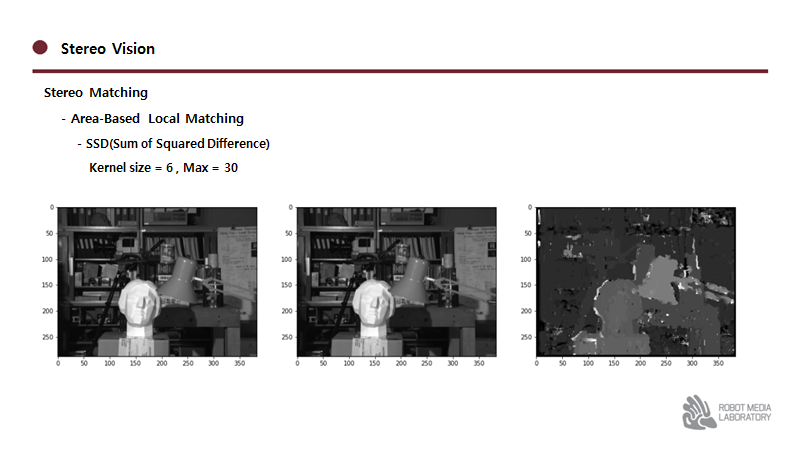
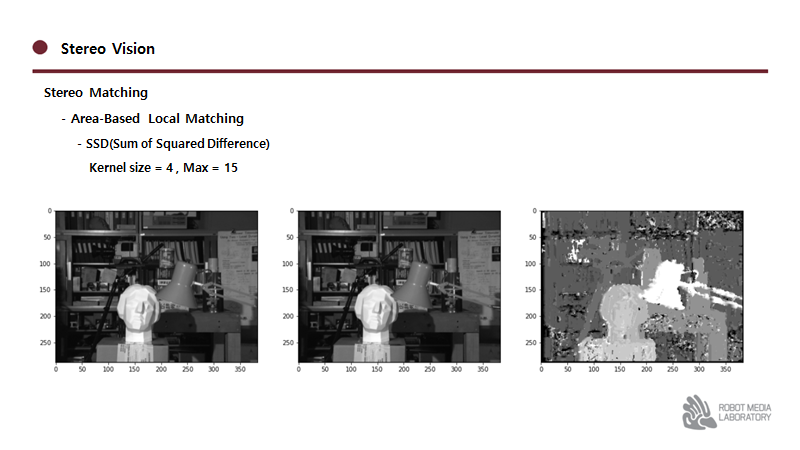
구현한 결과는 위와 같다.

Deep Learning Researcher in 2D & 3D Vision