서론
IMU : Inertial Measurement Unit
이제는 어디에든 들어있는 IMU(관성측정장치)
휴대폰은 물론 Mobile 로봇, 자동차 등등
물체의 동작을 인식하고 제어하는데 반드시 필요한 센서이다.
IMU 는 일종의 복합 센서로
자이로스코프 : Gyroscope
가속도계 : Accelerometer
지자기센서 : Geo-magnetic sensor
각각 3축씩 9축을 나타낼 수 있다.
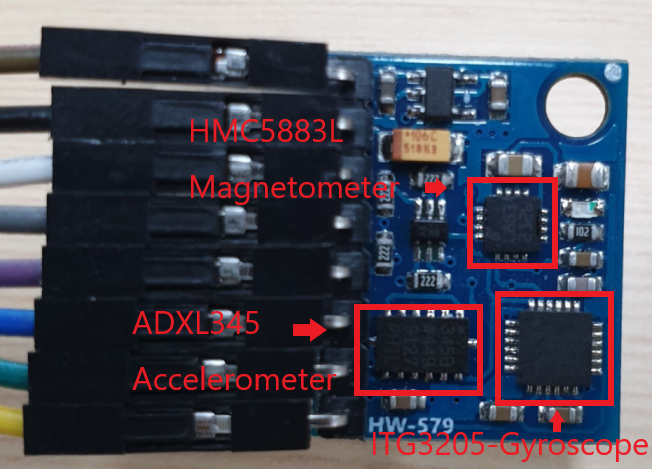
그 중, HW-579 를 사용할 예정이다.
참고)
센서를 찾다보면 10축도 볼 수 있는데 기압센서(Pressure Sensor, Barometer) 를
포함하여 고도를 측정할 수 있다.
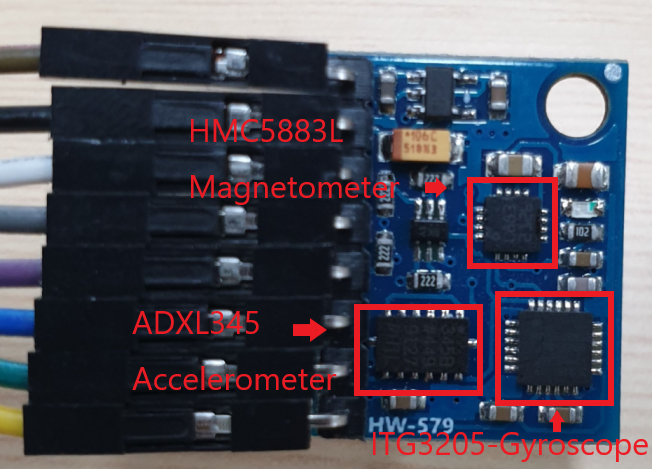
내부에는
| 센서 | 제품명 |
|---|---|
| 자이로스코프 | ITG3205 |
| 가속도센서 | ADXL345 |
| 지자기센서 | HMC5883L |
가 있다.
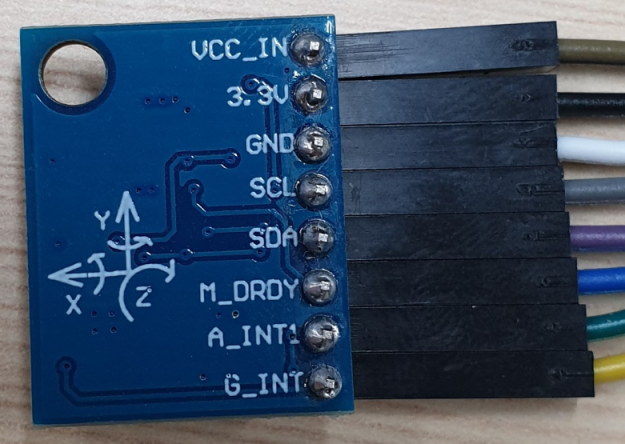
뒤쪽을 보면 SCL, SDA 가 있는 걸 보아 I2C 통신을 하는 듯 하다.
센서
Gyroscope
모든 회전하는 물체는 외력이 없을 시 각 운동량 보존 법칙을 만족합니다.
L = mvr
L : 각 운동량
m : 물체의 질량
v : 물체의 선속도(= rω : 회전반경x각속도)
r : 회전 반경
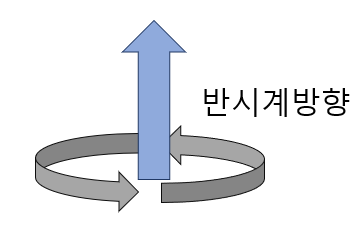
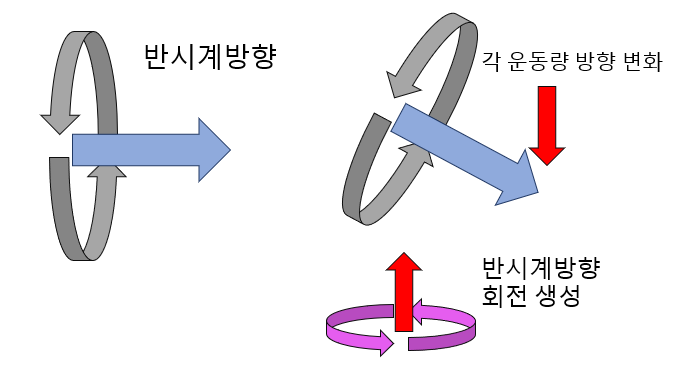
각 운동량의 방향은 앙페르의 오른나사 법칙과 같은 방향을 가지고 있다.
반시계 방향으로 회전을 하면 위쪽 방향으로 각 운동량의 방향이 생긴다는 것이다.
이러한 보존 법칙으로 회전을 하면 회전 관성이 생기는데
모든 물체가 작용 반작용 법칙에 적용을 받듯이
외력을 가해 방향을 바꾸면 변한 힘만큼
각 운동량을 보존하기 위해 각 운동량이 반대로 생긴다는 것이다.
그리고 그에 따라 회전이 생긴다.
자이로스코프는 회전자 라는 것이 있어 이것이 돌면 중력 방향으로 유지한다.(회전관성).
각 운동량 보존 법칙에 의해 회전자의 각운동량 방향을 바꾸면 자이로스코프 내부에 짐벌의
회전 반발력을 측정하여 전기 신호로 바꾼 것이 자이로스코프이다.
각속도 (ω) = 회전 각도 (θ) x 시간 (s) : rad/s
센서값으로 "각속도"를 구하면 계산을 통해 "회전 각도"를 알 수 있고
자이로스코프를 단 물체는 원래 위치에서 얼마나 회전한지 알 수 있게 되는 것이다.
Accelerometer
가속도센서는
질량이 가지는 관성을 이용하여
스트레인 게이지 (Strain Gauge)
가 변화하는 것을 이용한 센서이다.
버스에 탄 승객이
출발과 급정지 할 때 쏠림을 느끼는 것과 같다.
Strain Gauge
물리적 변화에 의해 저항의 크기가 변하는 센서이다.
저항의 크기는 길이에 비례하고 면적에 반비례한다.
R = 길이(l) / 면적(A)
- 예를 들어 카드에 스트레인 게이지가 있고 카드를 구부리면
볼록한 부분은 길이가 길어지고 면적이 좁아져 저항의 크기가 커지고
오목한 부분은 길이가 짧아지고 면적이 커져 저항의 크기가 작아진다.
(전선에 해당하는 부분은 늘어지고 줄어듦)
Geo-magnetic
지자기센서는
Geo-magnetic(Magnetoresistive) Sensor, Magnetometer 또는 Digital Compass Sensor
라 불린다.
지자기 센서에는
Hall Effect
MR (Magneto Resistance)
MI (Magneto Impedance)
이 세가지로 용도와 가격에 따라 나누는데
간단히 설명하면
HALL : 자기장 -> 홀 소자내의 전자 변화 -> 전류 생성 -> 전압 변화
MR : 자기장 -> MR 소자 저항 변화 -> 전압 변화
MI : 자기장 -> 펄스 전류 생성 -> 전압 변화
정밀도 : 홀 < MR < MI
가격 : 홀 > MR > MI
2편에서 계속 <<
