• 3D 데이터 표현
• 복셀
• 포인트 클라우드
• 메쉬
• 포인트 클라우드
• 얻는 방법?
• 포인트 클라우드 처리 개요
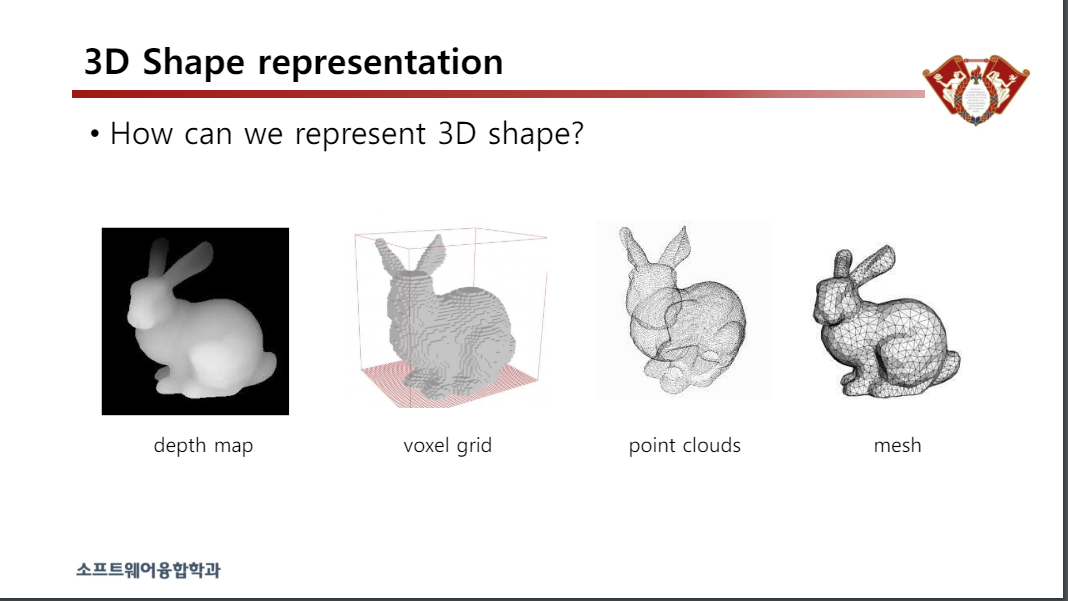
• 3D 모양을 어떻게 표현할 수 있나요?
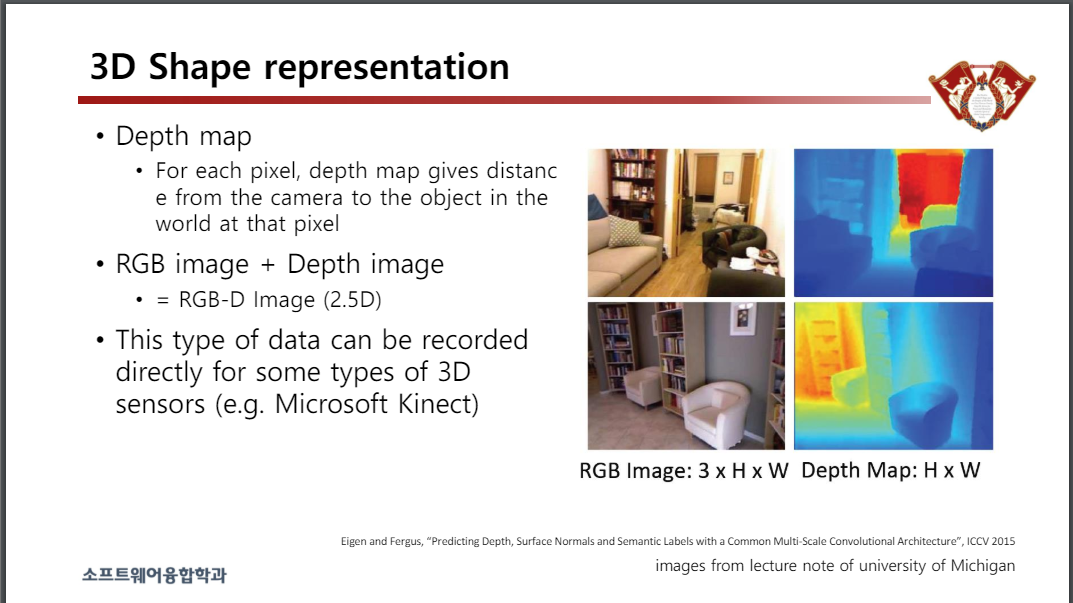
• Depth map
• 각 픽셀에 대해 깊이 맵은 카메라에서 해당 픽셀에 있는 세계의 객체까지의 거리를 제공합니다.
• RGB image + Depth image
• = RGB-D Image (2.5D)
• 이 유형의 데이터는 일부 유형의 3D 센서(예: Microsoft Kinect)에 대해 직접 기록될 수 있습니다
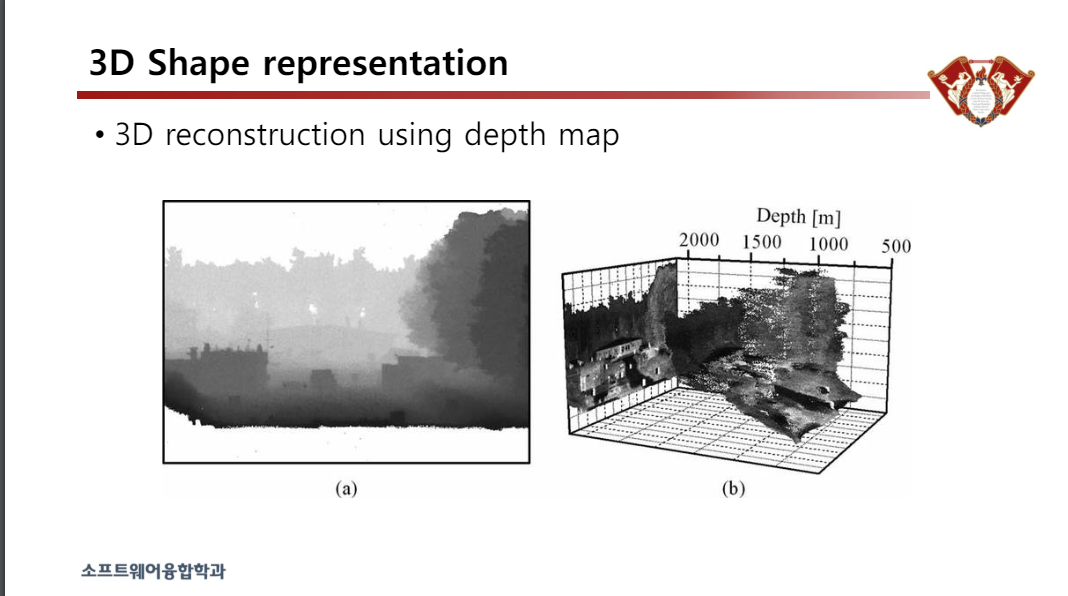
• 깊이 맵을 이용한 3차원 재구성

• 복셀 그리드
• 복셀: 볼륨 픽셀
• 복셀은 3D 공간의 일반 그리드에 있는 값을 나타냅니다.
• V x V x V 점유 그리드로 모양을 표현합니다.
• 장점
• 개념적으로 단순함: 단순한 3D 그리드
• 컨볼루션이 가능하다
• 단점
• 미세한 구조를 포착하려면 높은 공간 해상도가 필요합니다.
• 볼륨 공간의 대부분이 비어 있습니다!
• 고해상도로의 확장이 쉽지 않습니다.
• 사물을 표현하는데 좋음
• 환경을 표현하기에는 좋지 않음(불가능할 수도 있음)
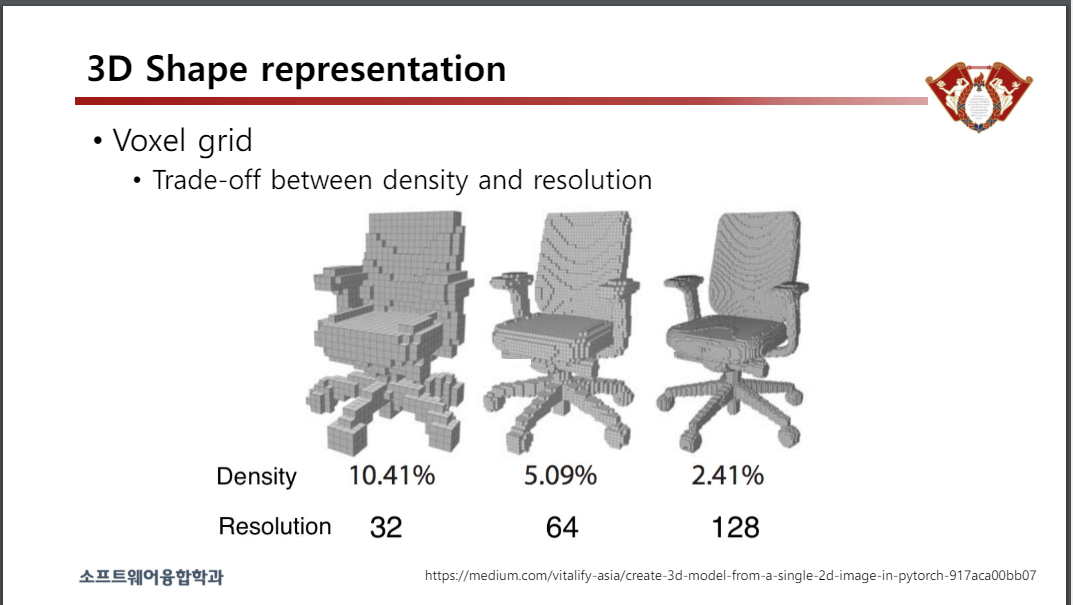
밀도와 해상도 사이의 균형
Point Clouds
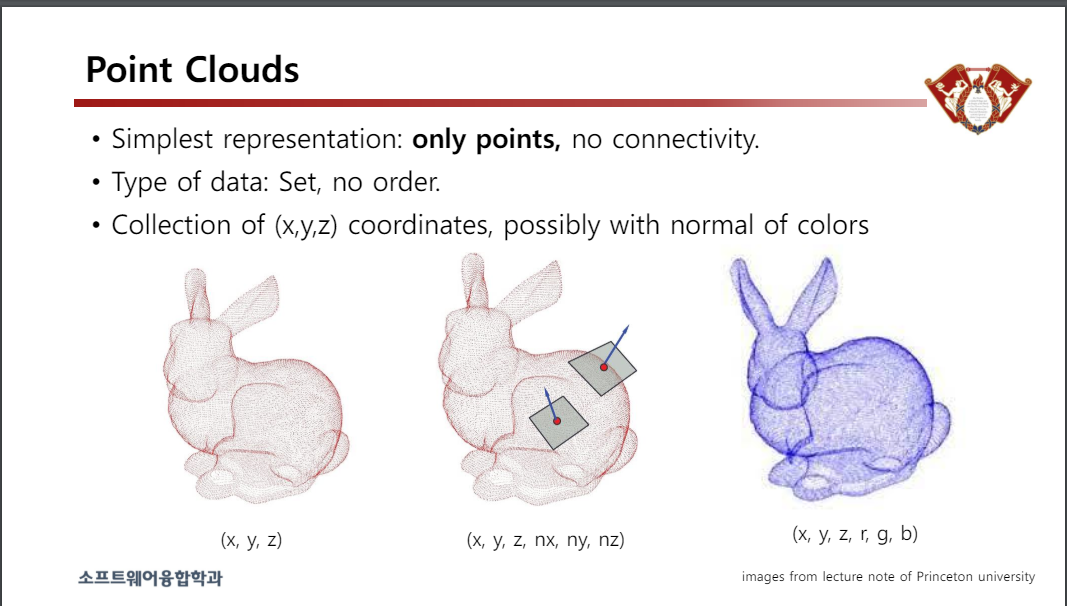
• 가장 단순한 표현: 점만 있고 연결성은 없습니다.
• 데이터 유형: 설정, 순서 없음.
• (x,y,z) 좌표 모음(가능한 경우 일반 색상 포함)
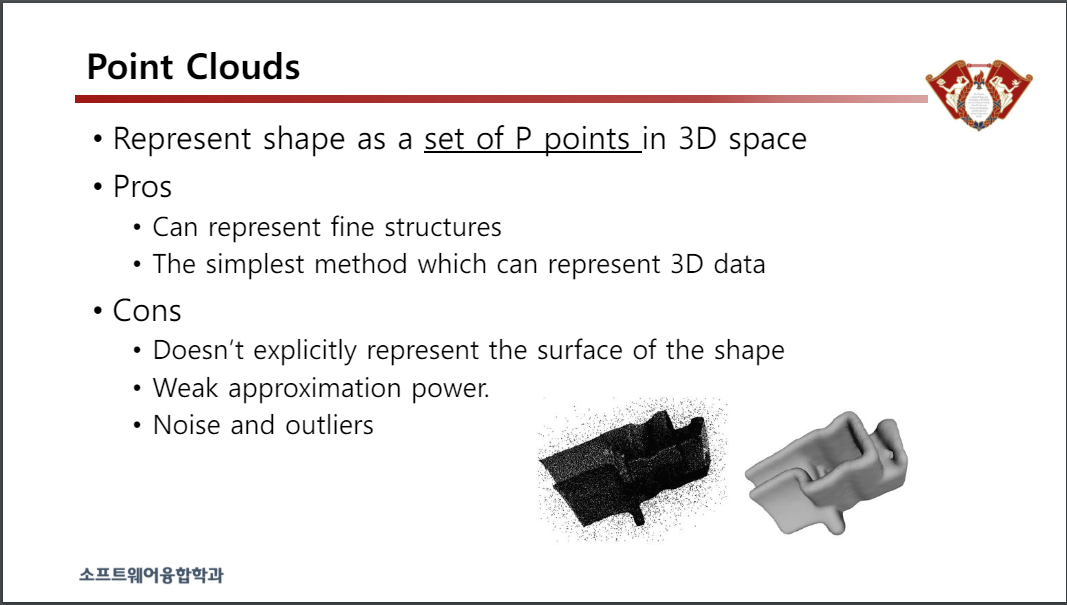
• 모양을 3D 공간의 P점 집합으로 표현합니다.
• 장점
• 미세한 구조를 표현 가능
• 3D 데이터를 표현할 수 있는 가장 간단한 방법
• 단점
• 모양의 표면을 명시적으로 나타내지 않습니다.
• 약한 근사력.
• 노이즈 및 이상치
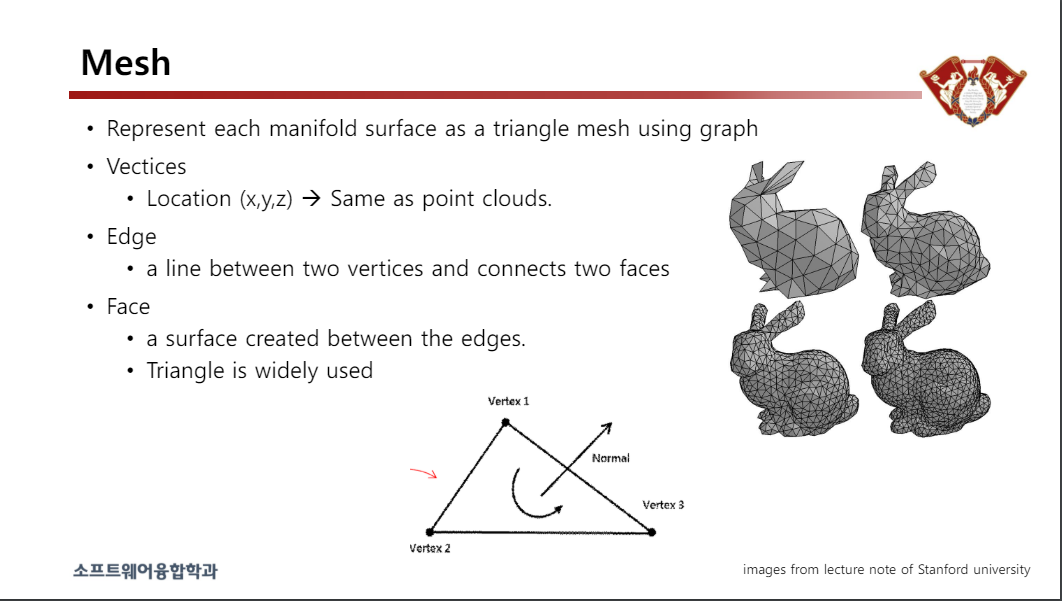
Mesh
• 각 다양체 표면을 그래프를 이용하여 삼각형 메쉬로 표현
• 벡터스
• 위치(x,y,z) → 포인트 클라우드와 동일합니다.
• 가장자리
• 두 꼭지점 사이의 선으로 두 면을 연결합니다.
• 얼굴
• 가장자리 사이에 생성된 표면.
• 삼각형이 널리 사용됨
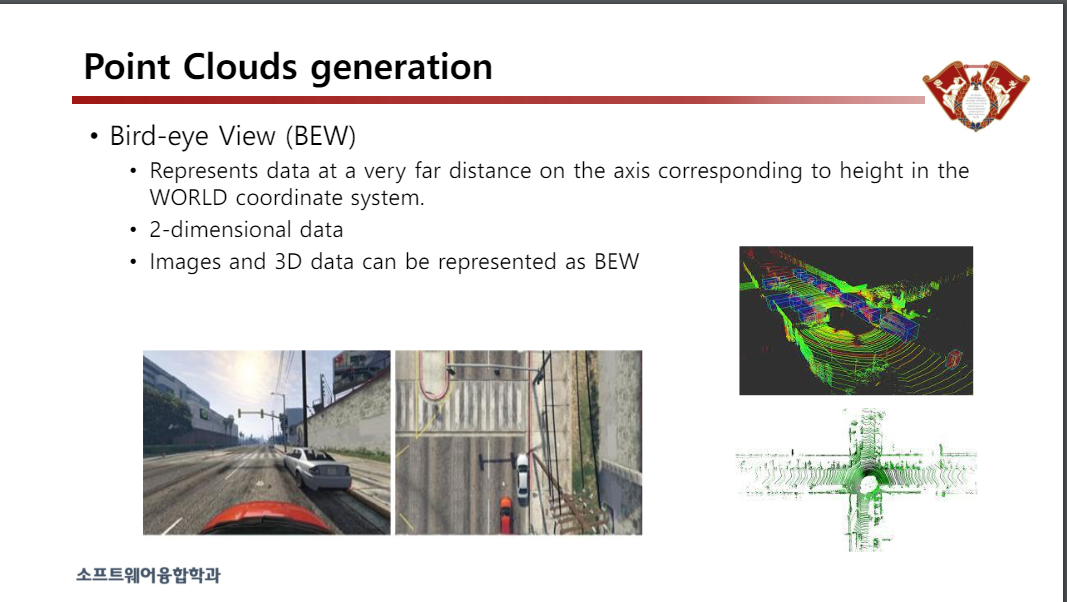
Point Clouds generation
• 조감도(BEW)
• WORLD 좌표계의 높이에 해당하는 축을 기준으로 매우 먼 거리에 있는 데이터를 나타냅니다.
• 2차원 데이터
• 이미지 및 3D 데이터를 BEW로 표현 가능
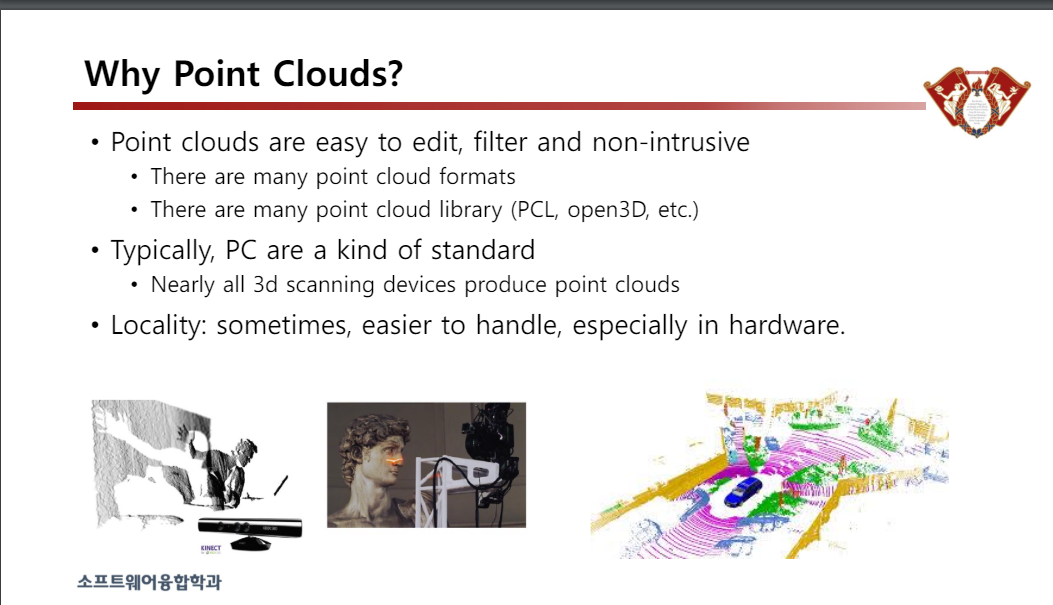
Why Point Clouds?
• 포인트 클라우드는 편집, 필터링이 쉽고 방해가 되지 않습니다.
• 다양한 포인트 클라우드 형식이 있습니다.
• 많은 포인트 클라우드 라이브러리(PCL, open3D 등)가 있습니다.
• 일반적으로 PC는 일종의 표준입니다.
• 거의 모든 3D 스캐닝 장치는 포인트 클라우드를 생성합니다.
• 지역성: 때로는 특히 하드웨어에서 처리하기가 더 쉽습니다
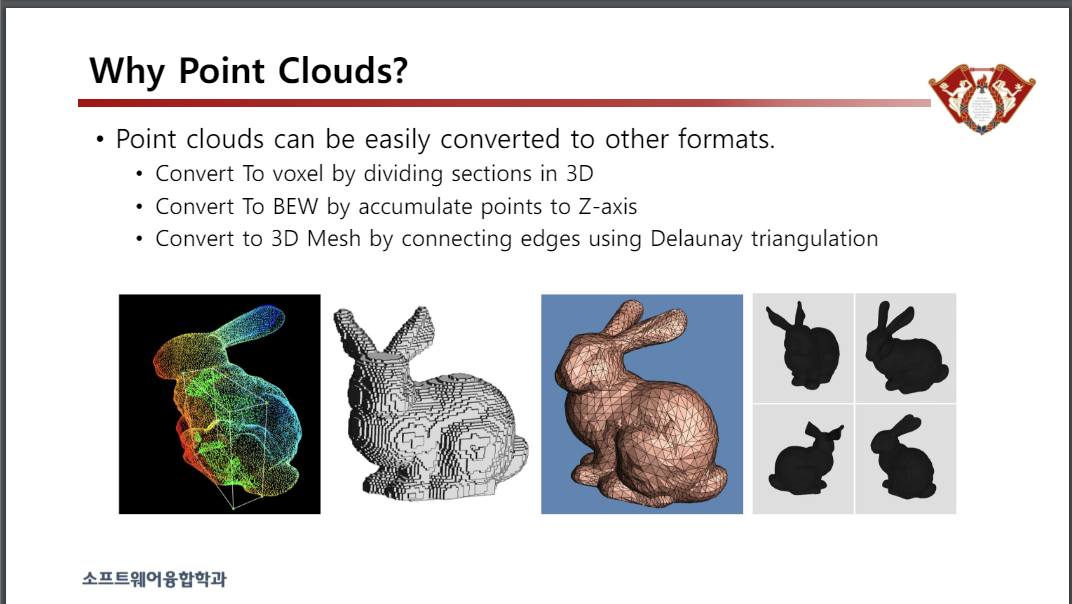
• 포인트 클라우드는 다른 형식으로 쉽게 변환될 수 있습니다.
• 3D로 단면을 나누어 복셀로 변환
• Z축에 포인트를 누적하여 BEW로 변환
• Delaunay 삼각측량을 사용하여 모서리를 연결하여 3D Mesh로 변환합니다.
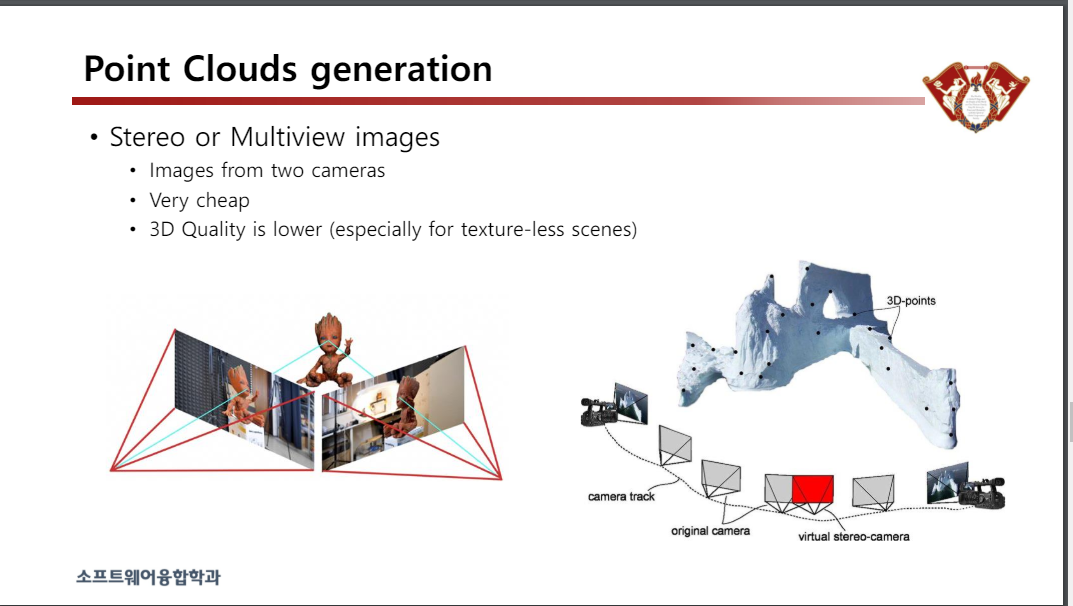
Point Clouds generation
• 스테레오 또는 다중뷰 이미지
• 두 대의 카메라에서 얻은 이미지
• 매우 저렴함
• 3D 품질이 낮습니다(특히 질감이 없는 장면의 경우).
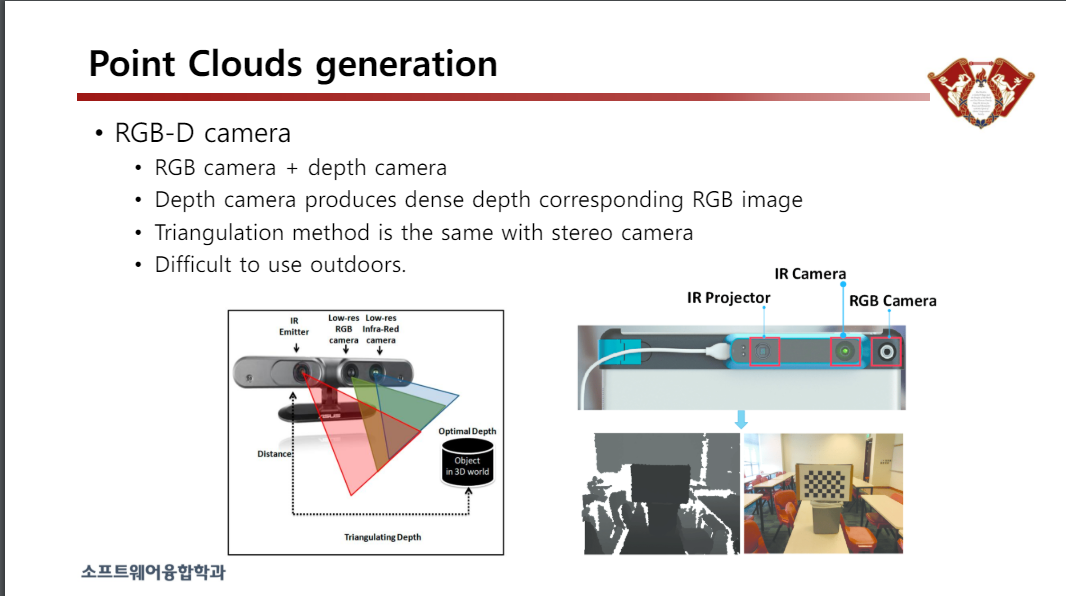
• RGB-D 카메라
• RGB 카메라 + 심도 카메라
• 깊이 카메라는 조밀한 깊이에 해당하는 RGB 이미지를 생성합니다.
• 삼각 측량 방법은 스테레오 카메라와 동일합니다.
• 야외에서 사용하기 어려움
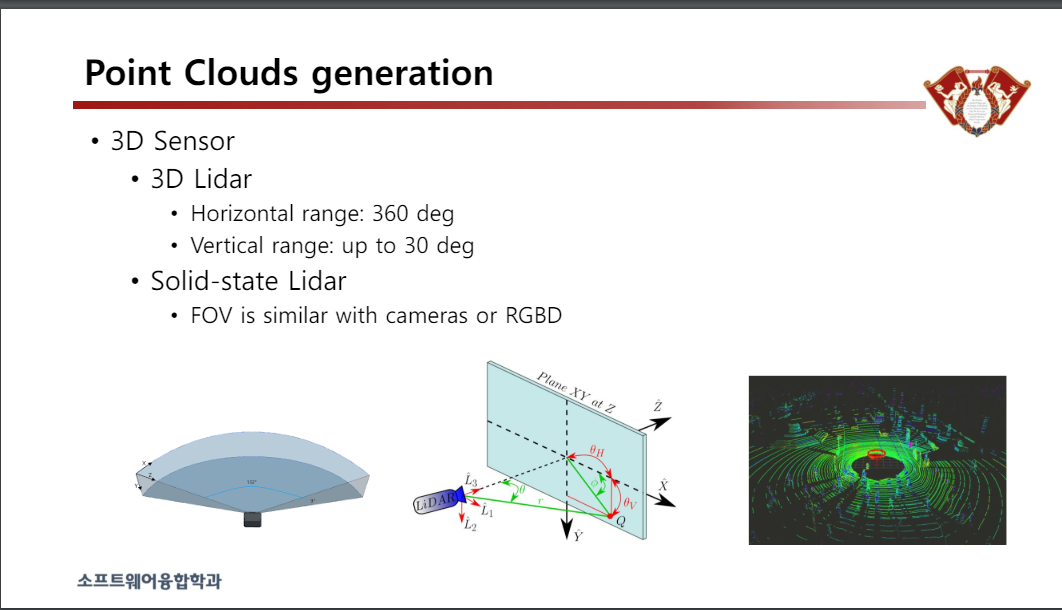
• 3D 센서
• 3D 라이더
• 수평 범위: 360도
• 수직 범위: 최대 30도
• 고체 LiDAR
• FOV는 카메라 또는 RGBD와 유사합니다.
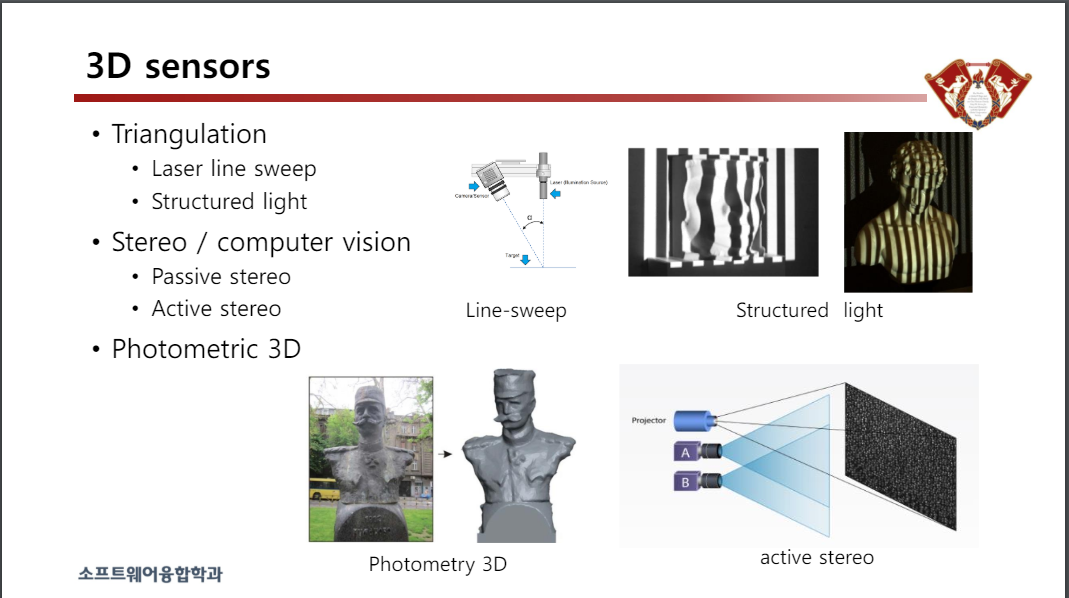
3D sensors
• 삼각측량
• 레이저 라인 스윕
• 구조화된 조명
• 스테레오/컴퓨터 비전
• 패시브 스테레오
• 액티브 스테레오
• 포토메트릭 3D
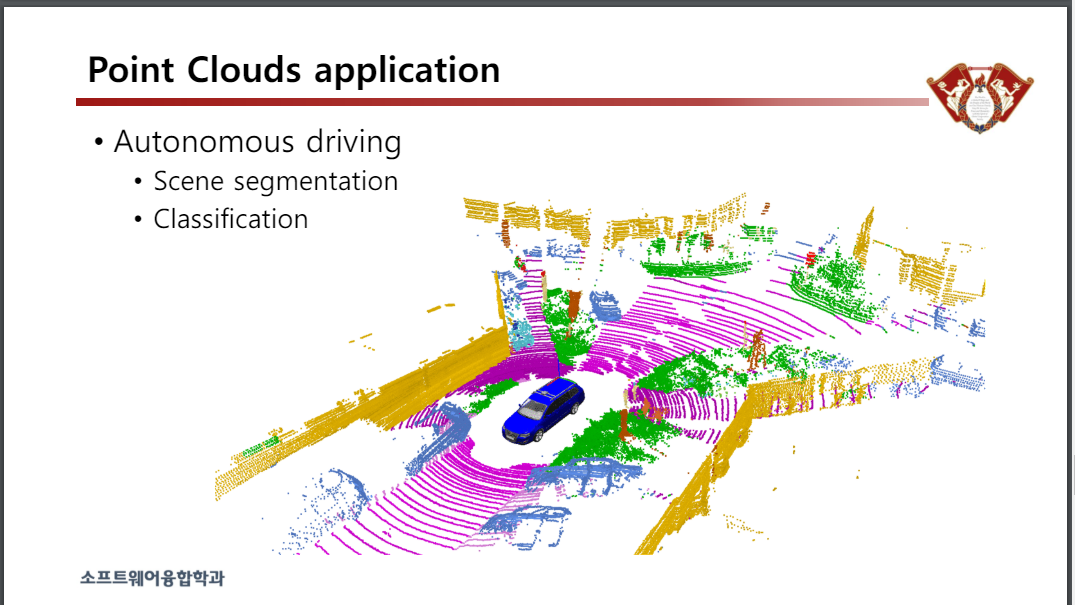
Point Clouds application
• 자율주행
• 장면 분할
• 분류
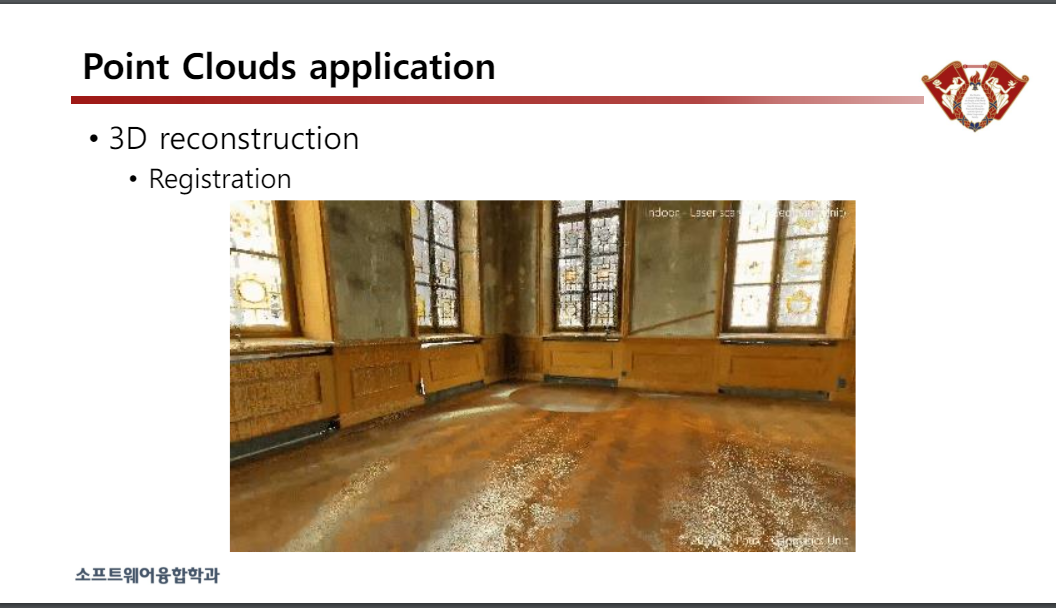
3D 재구성
• 등록
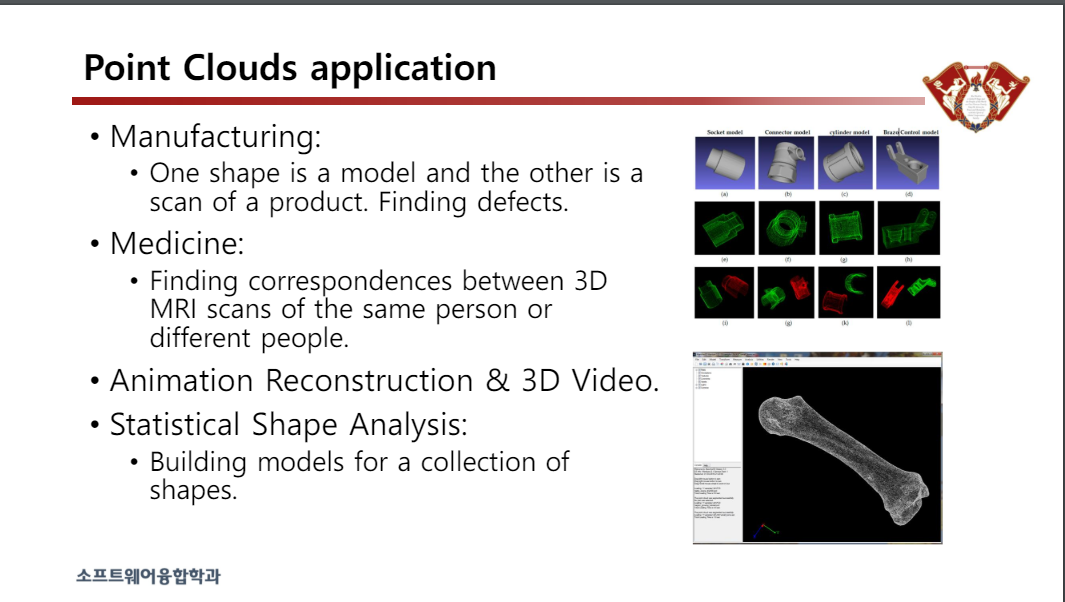
• 제조:
• 한 모양은 모델이고 다른 모양은 제품의 스캔입니다. 결함 찾기.
• 약:
• 동일한 사람 또는 다른 사람의 3D MRI 스캔 간의 일치성을 찾습니다.
• 애니메이션 재구성 및 3D 비디오.
• 통계적 형태 분석:
• 모양 모음을 위한 모델 구축.
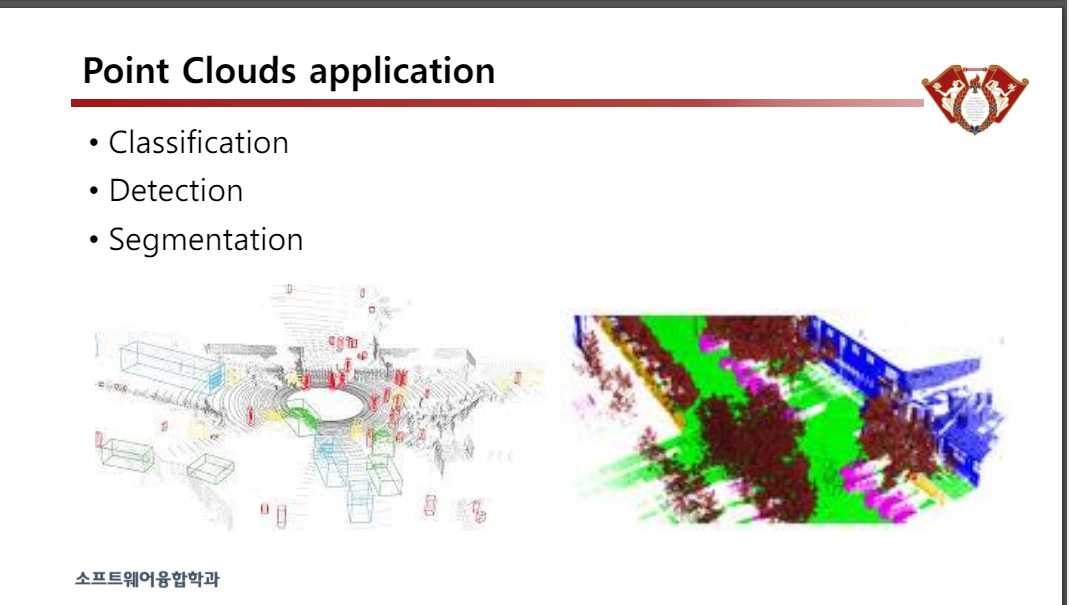
• 분류
• 탐지
• 세분화
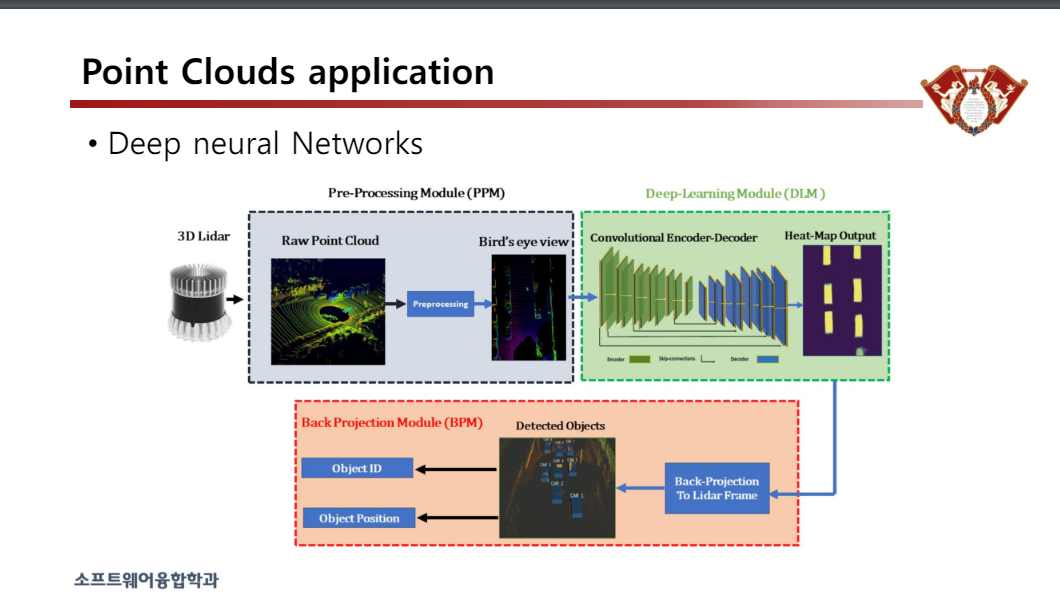
• Deep neural Networks
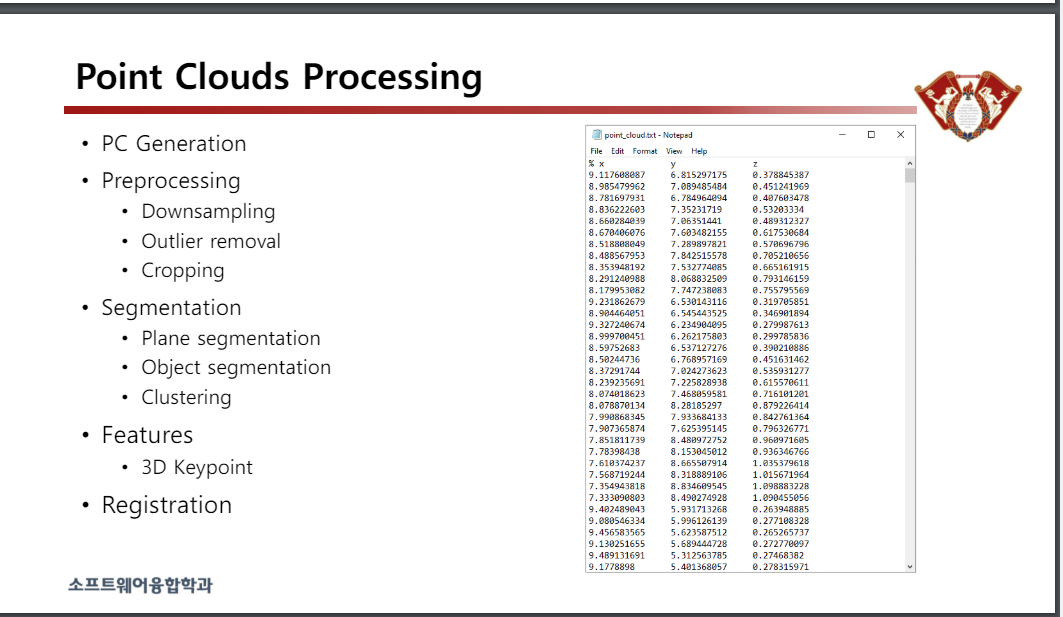
• PC세대
• 전처리
• 다운샘플링
• 이상치 제거
• 자르기
• 세분화
• 평면 분할
• 객체 분할
• 클러스터링
• 특징
• 3D 키포인트
• 등록
