필터링
• 다운샘플링
• 무작위 샘플링
• 균일한 샘플링
• 복셀 기반 샘플링
• 자르기
• 이상치 제거
• 반경 이상치 제거
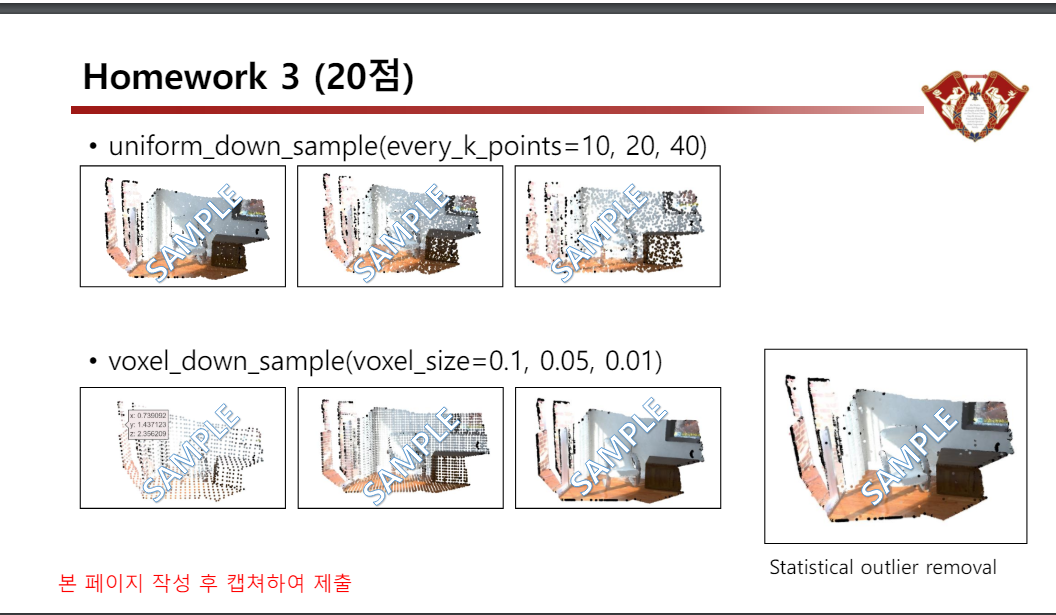
• 통계적 이상치 제거
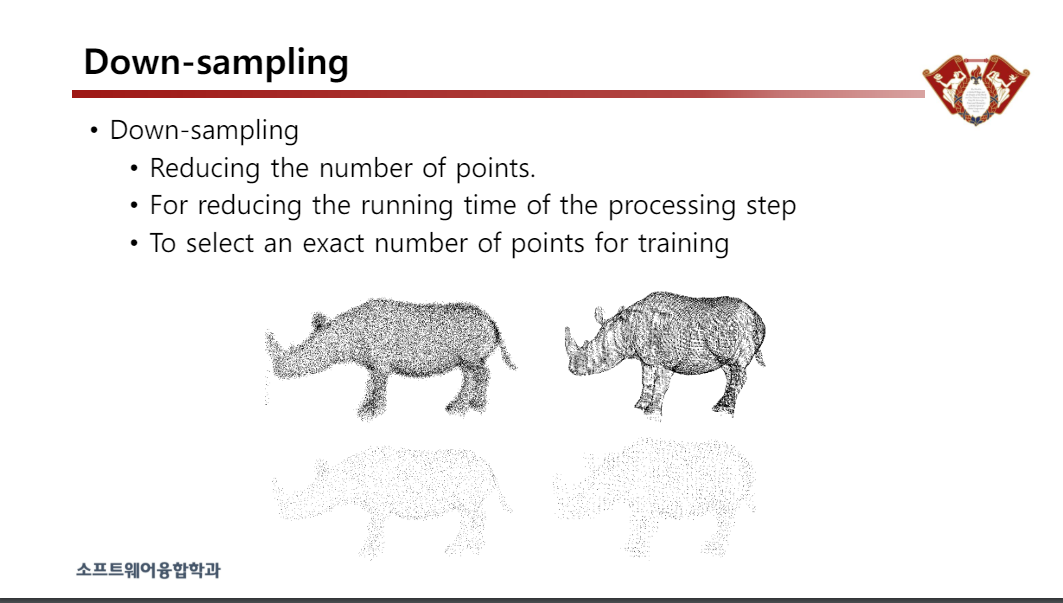
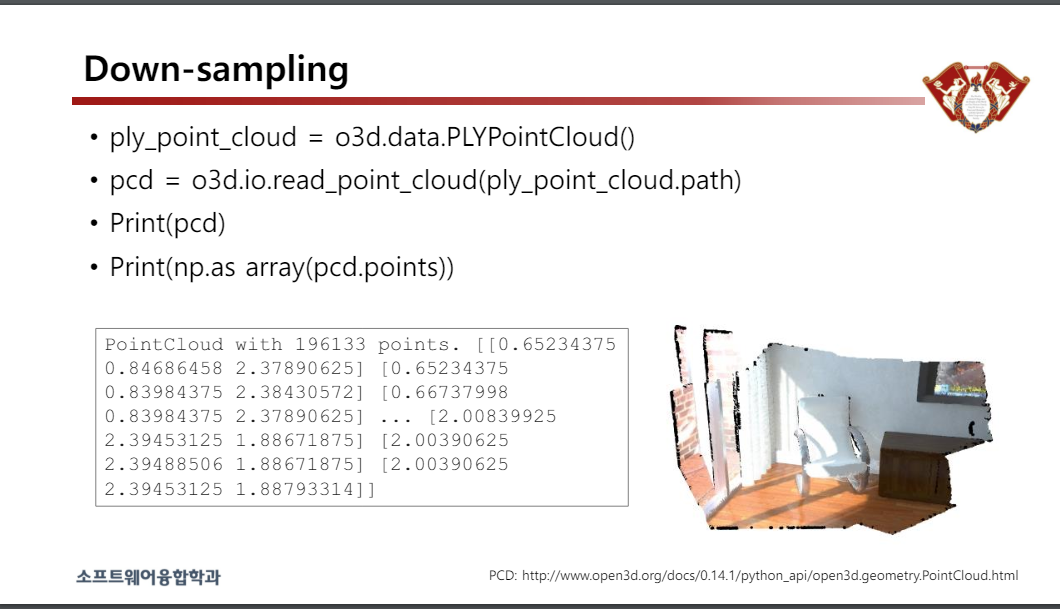
• 다운샘플링
• 포인트 수를 줄입니다.
• 처리 단계의 실행 시간을 줄이기 위해
• 훈련을 위한 정확한 포인트 수를 선택하려면
다운샘플링 방법
• 무작위 샘플링
• 입력 포인트 클라우드에서 임의의 포인트 선택
• 균일한 샘플링
• 순서에 따라 포인트를 균일하게 선택합니다.
• 복셀 기반 샘플링
• H x W x D 크기의 3D 복셀 그리드를 생성합니다.
• 각 복셀에는 3개의 축을 기준으로 동일한 간격에 속하는 포인트가 포함됩니다.
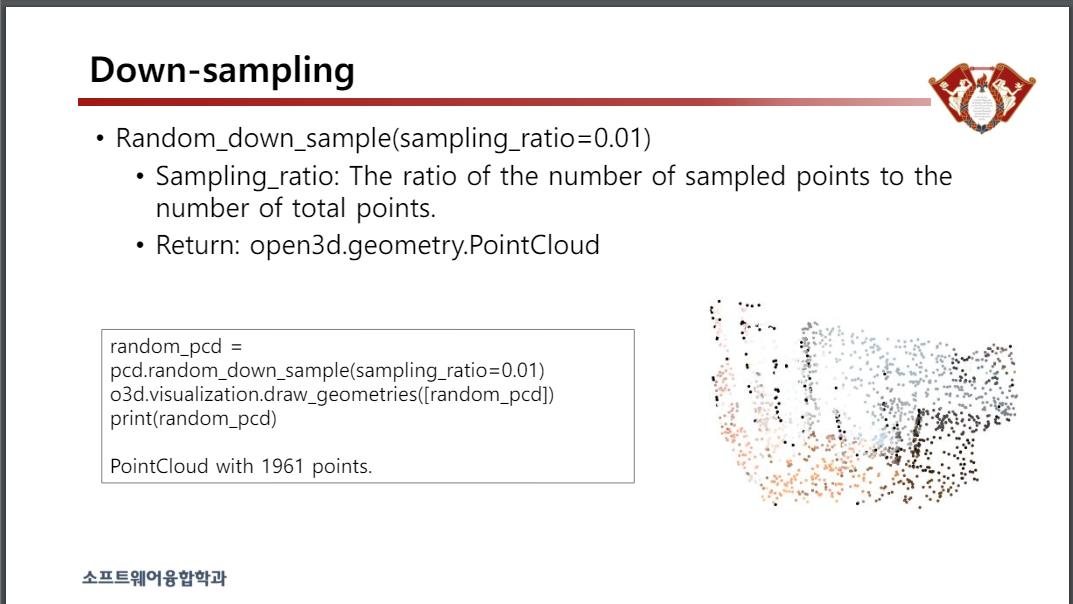
• Sampling_ratio: 전체 포인트 수에 대한 샘플링 포인트 수의 비율입니다.
• 반환: open3d.geometry.PointCloud
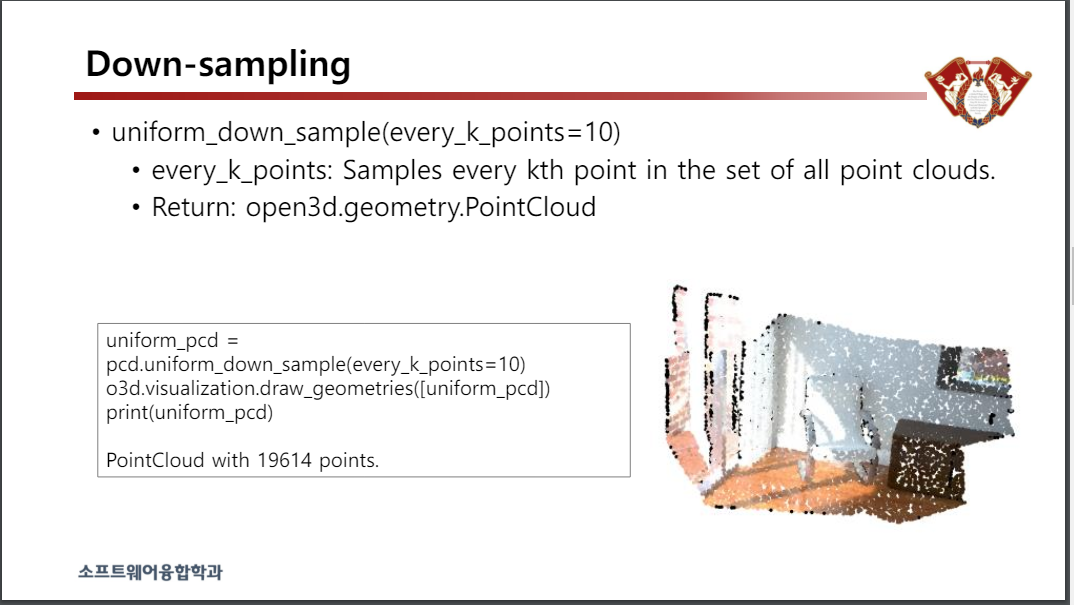
• Every_k_points: 모든 포인트 클라우드 세트에서 k번째 포인트마다 샘플링합니다.
• 반환: open3d.geometry.PointCloud
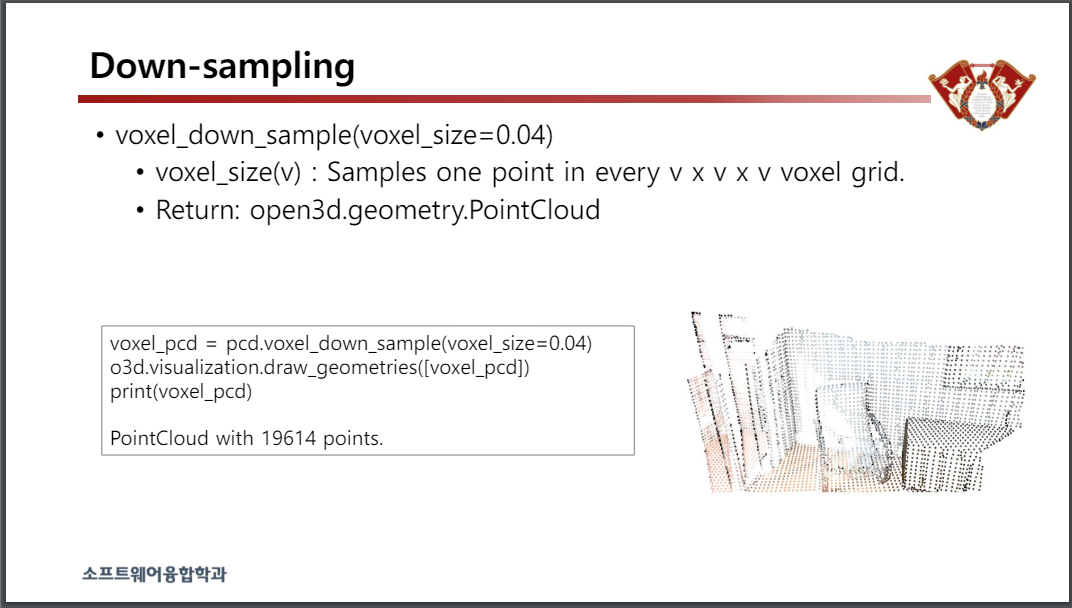
• voxel_size(v) : 모든 v x v x v 복셀 그리드에서 하나의 점을 샘플링합니다.
• 반환: open3d.geometry.PointCloud
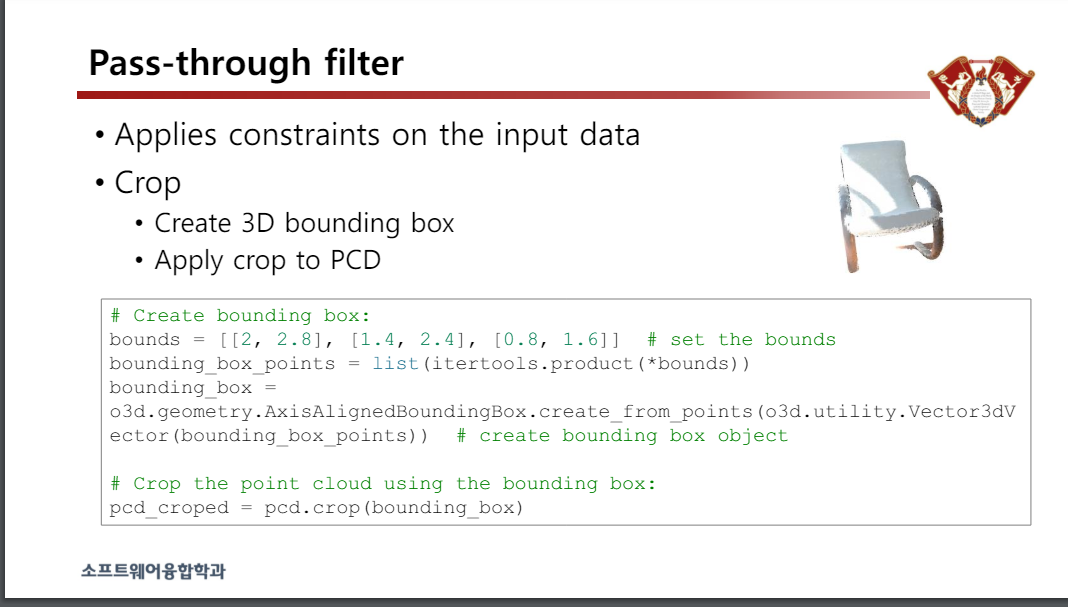
Pass-through filter
• 입력 데이터에 제약 조건을 적용합니다.
• 자르기
• 3D 경계 상자 생성
• PCD에 자르기 적용
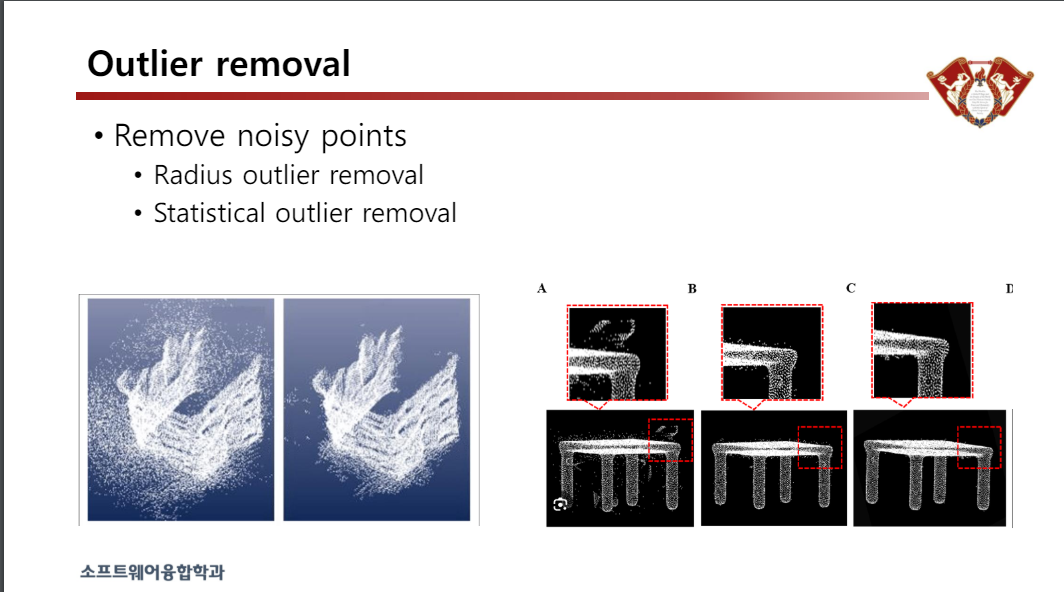
Outlier removal
• 노이즈 포인트 제거
• 반경 이상치 제거
• 통계적 이상치 제거
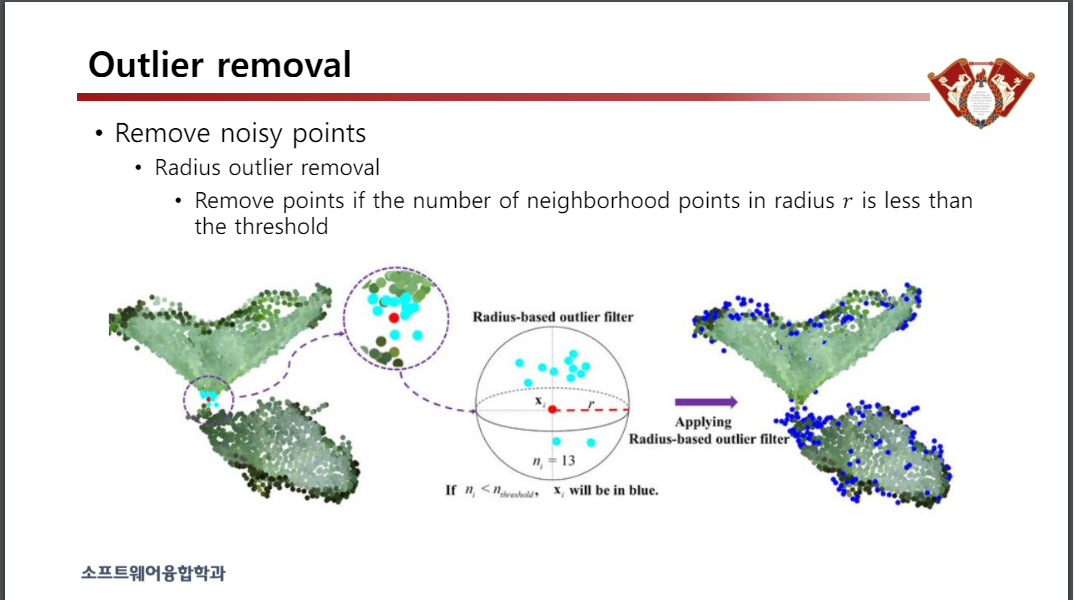
• 노이즈 포인트 제거
• 반경 이상치 제거
• 반경 𝑟의 인접 포인트 수가 임계값보다 작은 경우 포인트를 제거합니다.
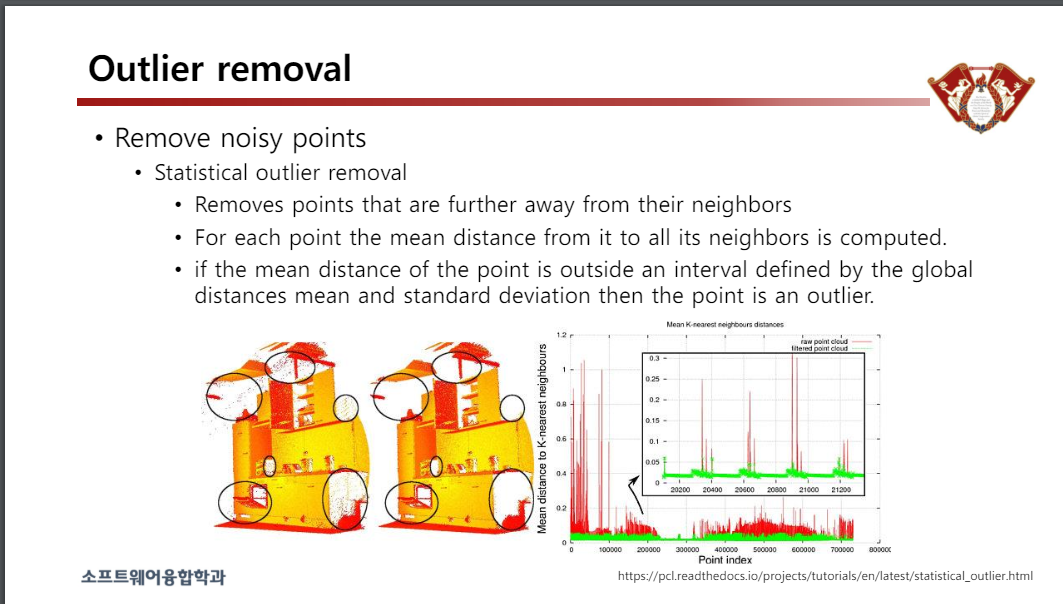
• 노이즈 포인트 제거
• 통계적 이상치 제거
• 이웃으로부터 더 멀리 떨어져 있는 포인트를 제거합니다.
• 각 지점에 대해 해당 지점에서 모든 이웃까지의 평균 거리가 계산됩니다.
• 점의 평균 거리가 전체 거리 평균과 표준 편차로 정의된 간격을 벗어나는 경우 해당 점은 이상치입니다.
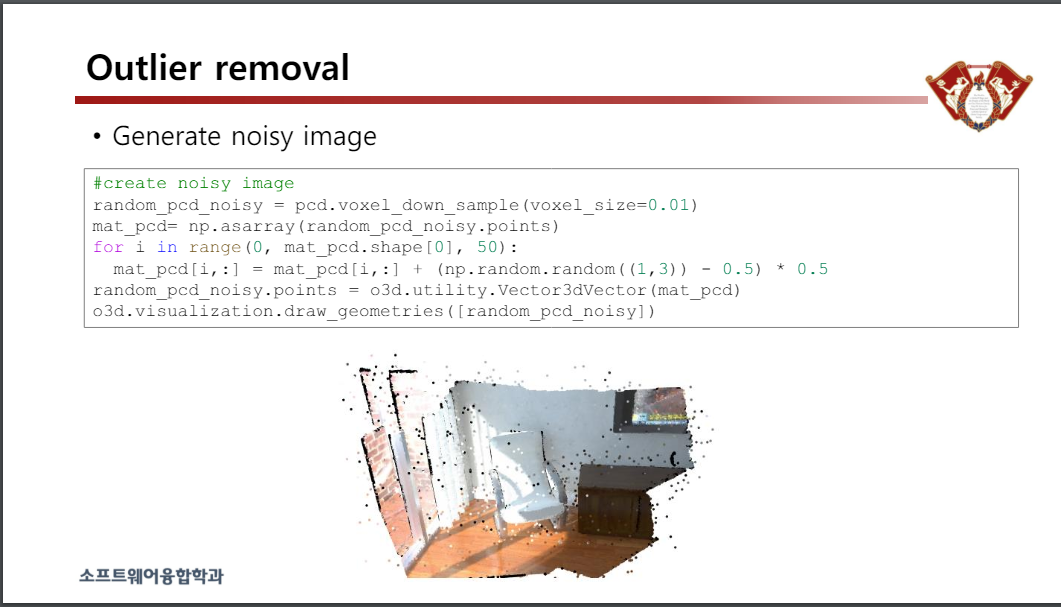
• Generate noisy image
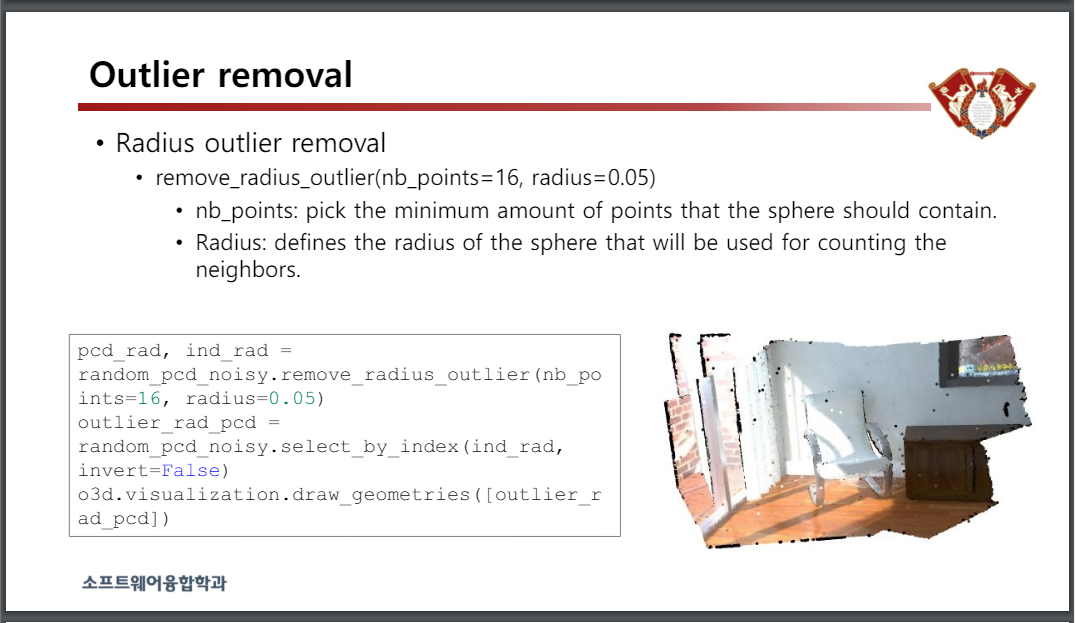
반경 이상치 제거
• nb_points: 구에 포함되어야 하는 최소 포인트 수를 선택합니다.
• 반경: 이웃을 계산하는 데 사용될 구의 반경을 정의합니다.
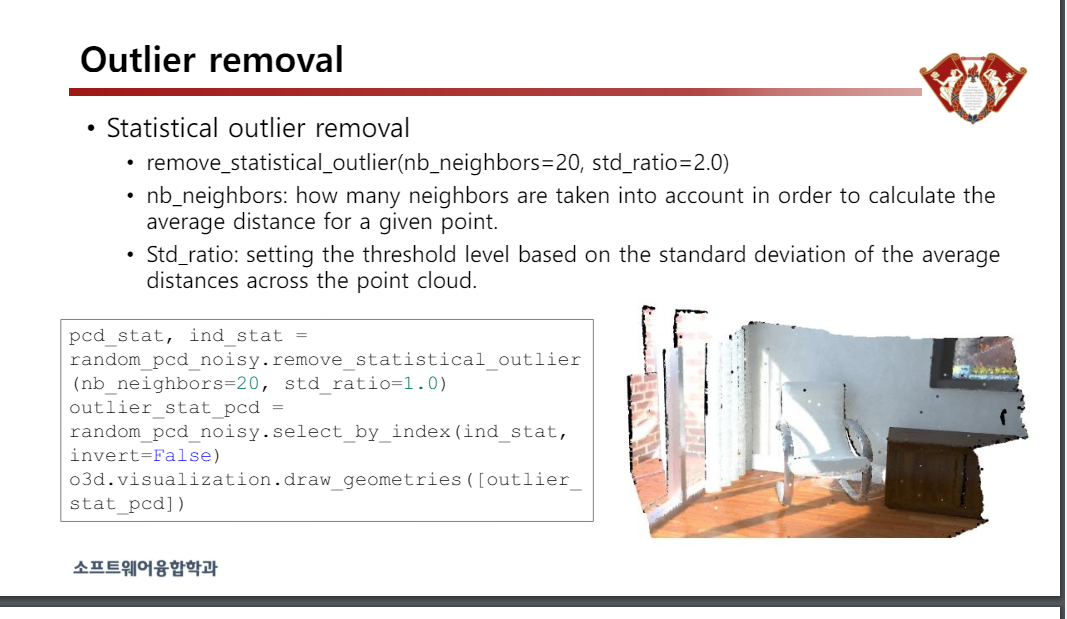
• 통계적 이상치 제거
• nb_neighbors: 주어진 포인트에 대한 평균 거리를 계산하기 위해 고려되는 이웃 수입니다.
• Std_ratio: 포인트 클라우드 전체 평균 거리의 표준 편차를 기반으로 임계값 수준을 설정합니다.