4 선, 원 검출 (허프 변환)
5 코너 검출
1 선 검출 , 허프 변환
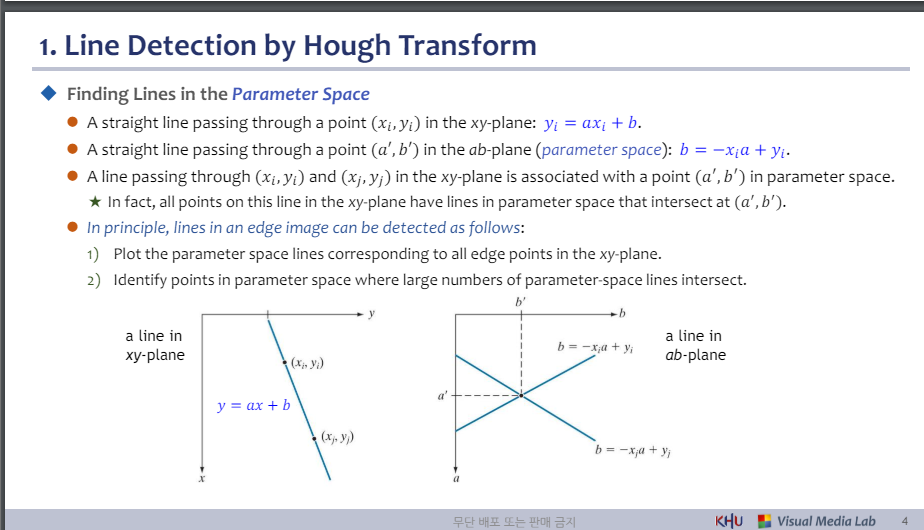
파라미터 공간에서 라인 찾기
-xy공간에서 직선
-ab공간(파라미터 공간)에서 직선
-a', b'을 지나는 두개의 직선
-라인 검출
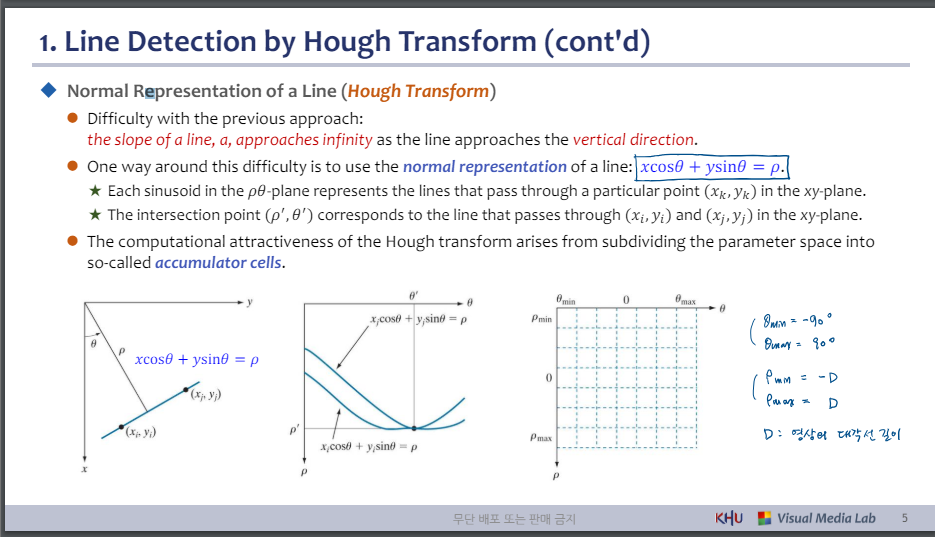
선의 노멀 표현(허프 변환)
-앞 장의 접근법은 무한대를 해결해야하는 문제점 존재
-해결을 위해 극좌표계 사용
-축적배열을 찾아 직선 검출
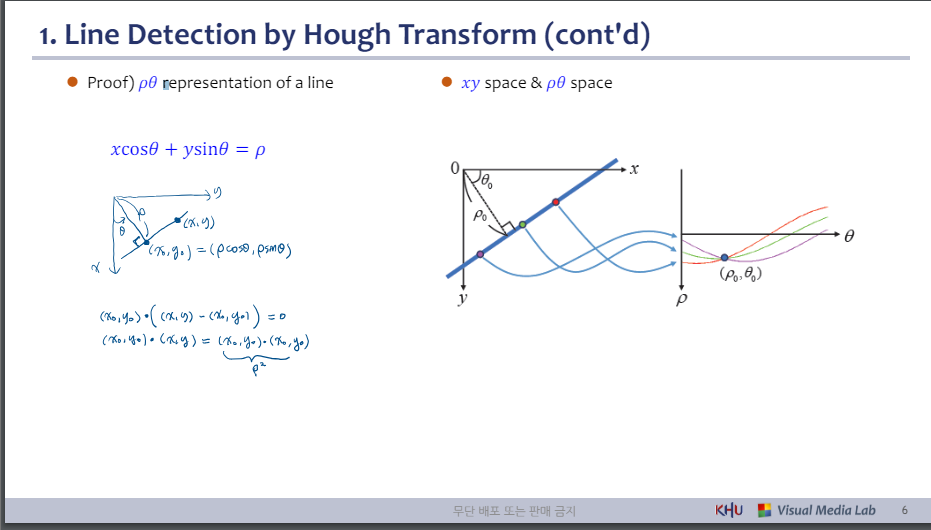
증명
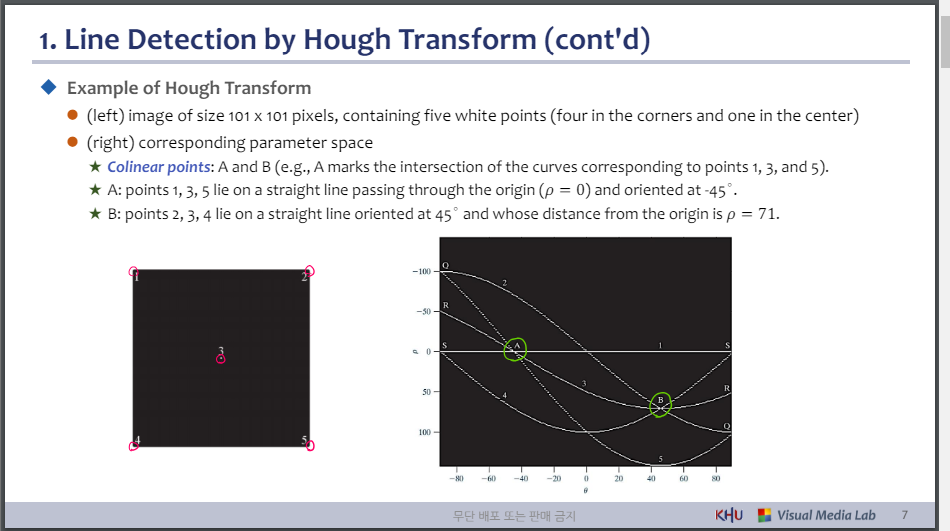
예제
-좌측 : 5개의 하얀 점 포함
-우측 : 파라미터 공간
동일선상 포인트
A: 1,3,5
B: 2,3,4
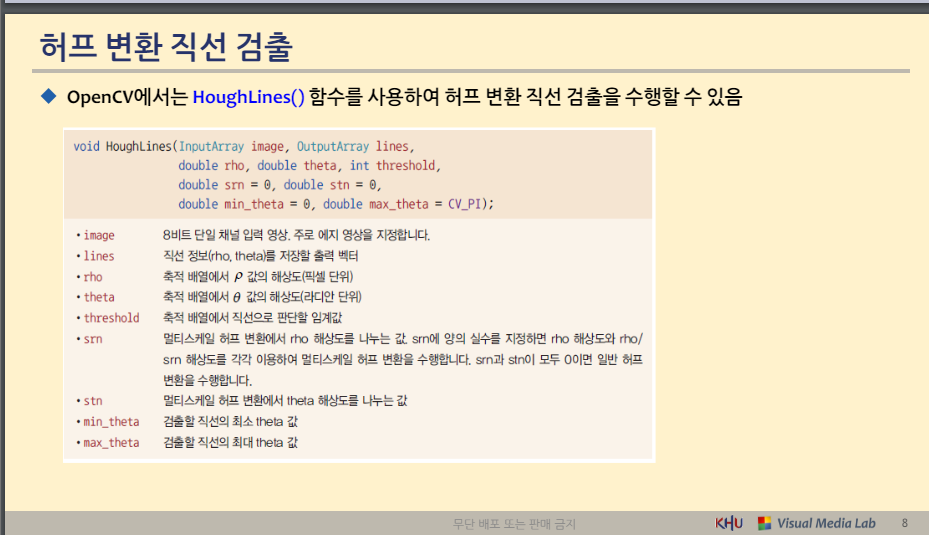
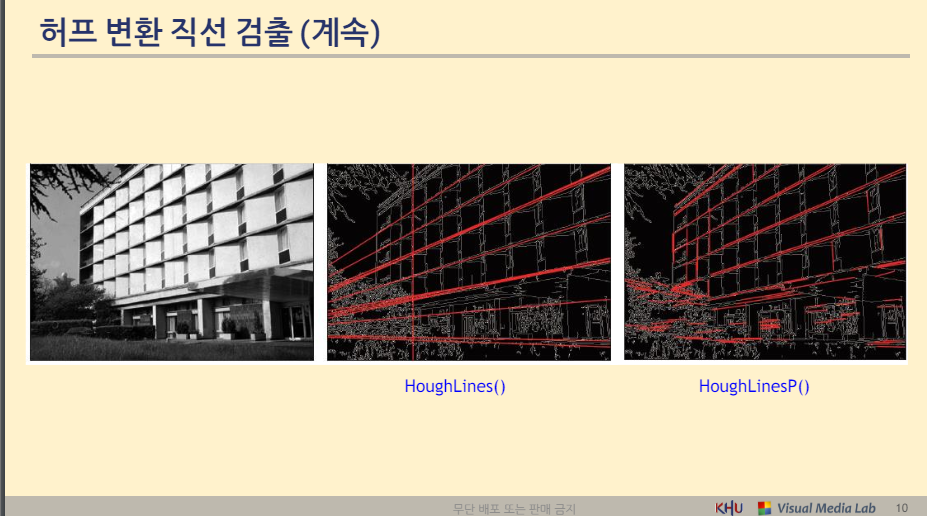
허프 변환 직선 검출
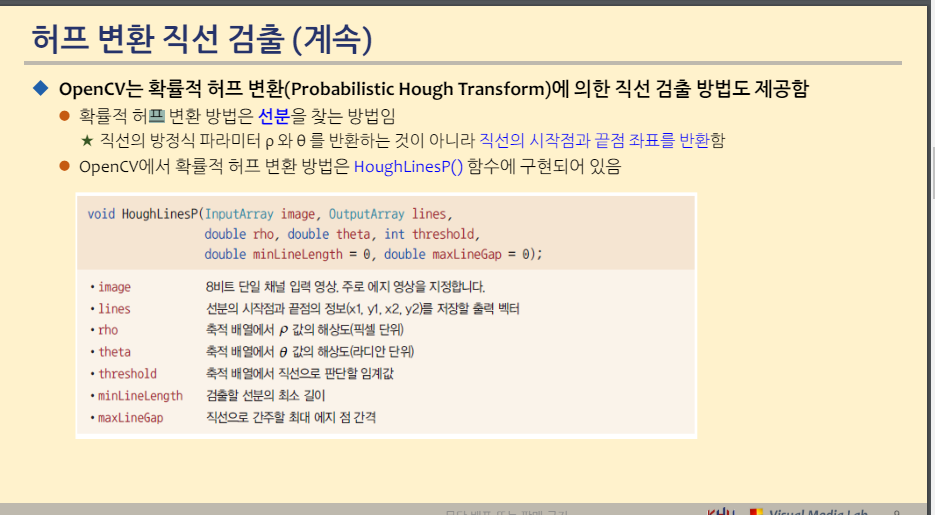
확률적 허프 변환
-선분을 찾는 방법 : 직선의 시작점과 끝점 반환
-HoughLinesP()
원 검출, 허프 변환
원 표현
-원의 방정식 : 파라미터 3개
-3차원 배열 필요 : 연산시간이 많이 필요
-허프 그래디언트 방법 사용
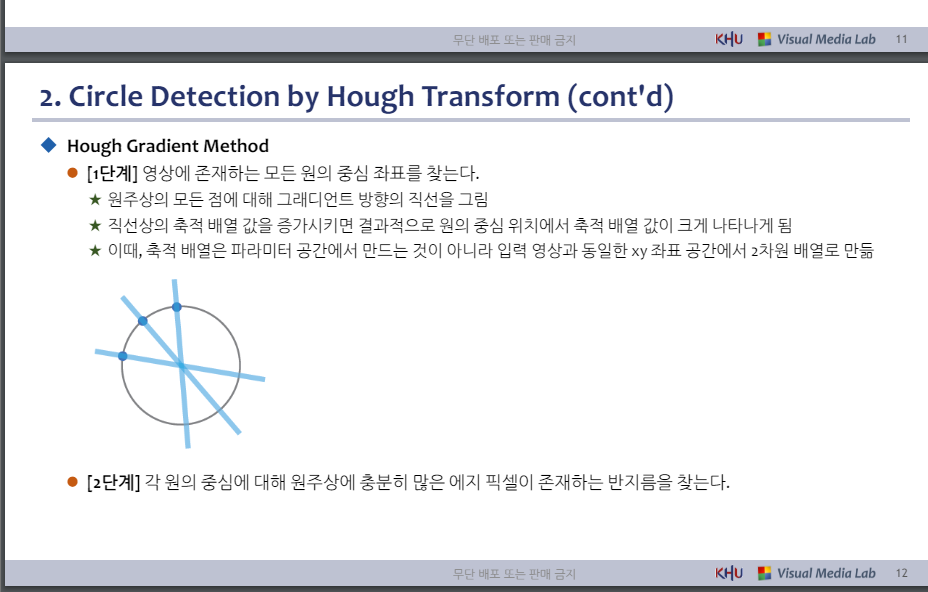
허프 그래디언트 방법
1 영상에 존재하는 모든 원의 중심 좌표 찾기
-원주 위의 모든 점에서 그래디언트 방향 직선 그리기
-직선 상의 축적 배열값 증가, 원의 중심에서 축적 배열값 커짐
-축적 배열은 2차원 배열로 만듦
2 각 원의 중심에 대해 원주상에 충분히 많은 에지 픽셀이 존재하는 반지름 찾기
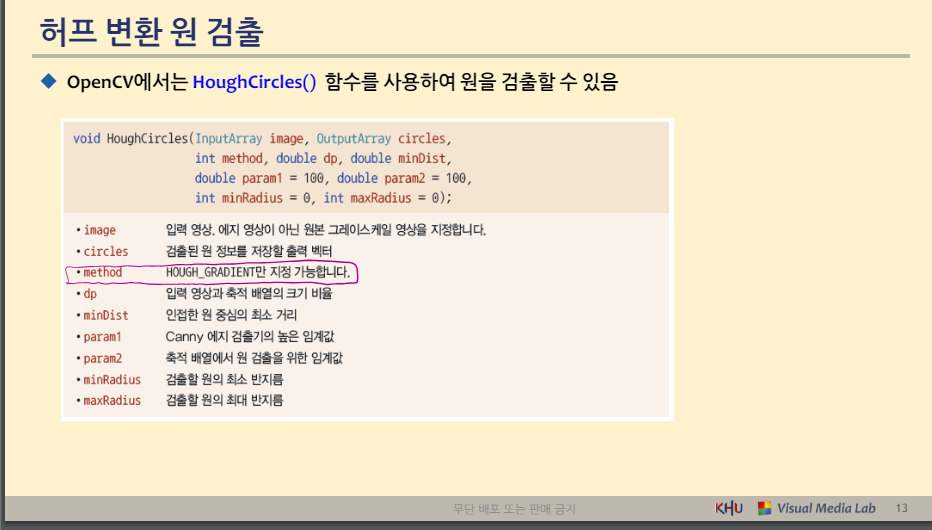
허프변환 원검출
HoughCircles()

예제
시험x
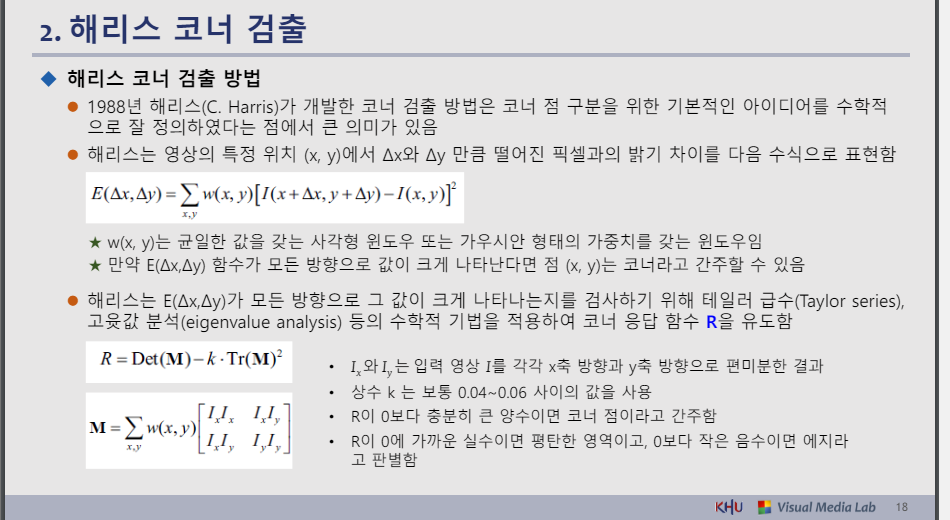
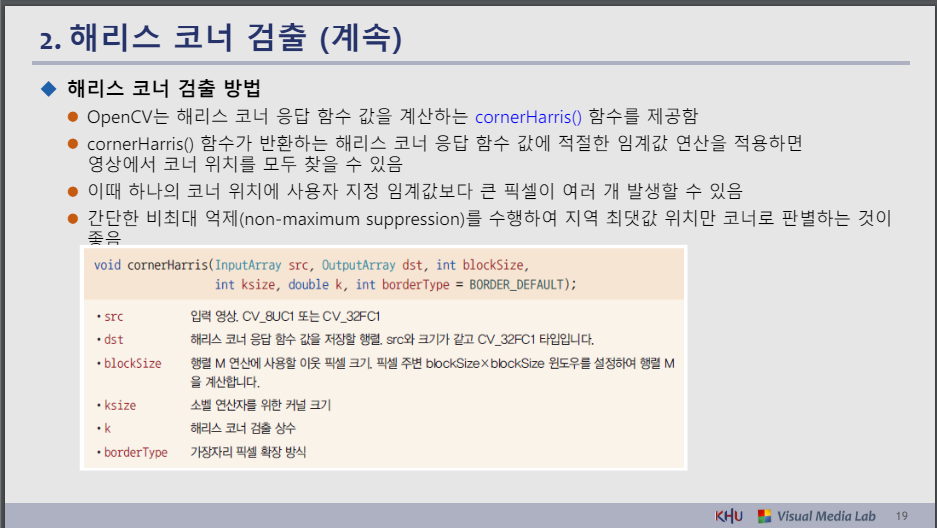
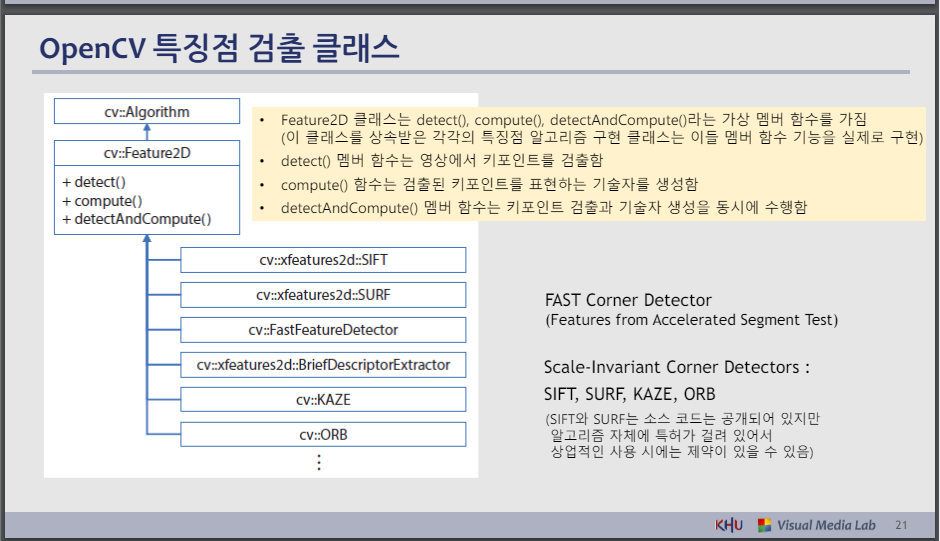
코너디텍션


Engineering