지난 2주간 ROS를 맛 봤습니다.
서론
ROS란?
Robot Operating System 으로 로봇을 제어하기 위한 프레임워크입니다. 최근 자율주행기술과 더불어 급격히 상승하고 있는 추세입니다.
시스템 구조를 말하자면 아래와 같은 모습입니다.

Turtlebot이라는 플랫폼은 ROS 기반에서 만들어졌기에 미리 정의해놓은 많은 기능들을 포함하고 있어 개발하기 편합니다.
통신
ROS는 각 노드(로봇)과의 통신을 위해 세 가지의 방식을 사용하고 있어요. TCP 기반의 TCPROS를 사용해요.
| 방향성 | 동기성 | 지속성 | |
|---|---|---|---|
| Topic | 단방향 | 비동기 | 지속적 |
| Service | 양방향 | 동기 | 일시적 |
| Action | 양방향 | 비동기 | 지속적, 일시적 |
이번 교육에서는 Topic에 대해 다뤘습니다.

이론 교육 중...
실습
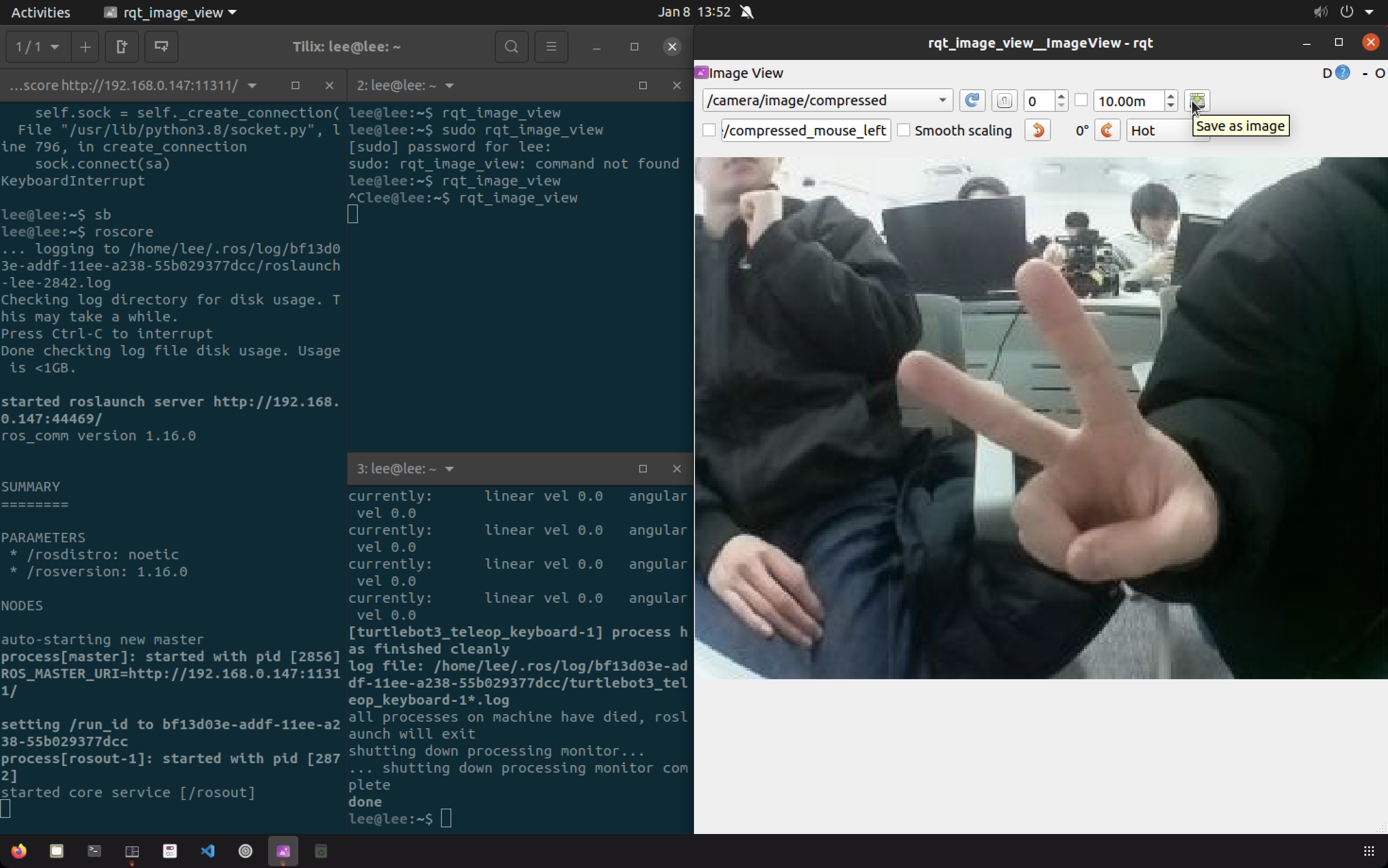
✌️
다음과 같이 roscore 의 마스터 노드가 필요하고 Publisher 노드와 Subscriber 노드를 생성하여 통신하는 방식입니다.

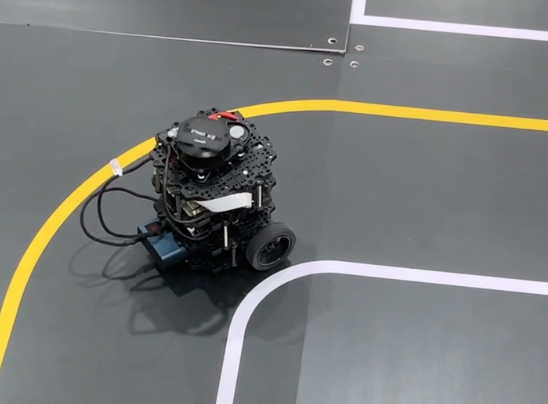
터블봇 매뉴얼의 내용을 바탕으로 실습 진행하였습니다.
실 주행을 하기 전 가상환경 (GAZEBO)에서 먼저 진행했습니다.
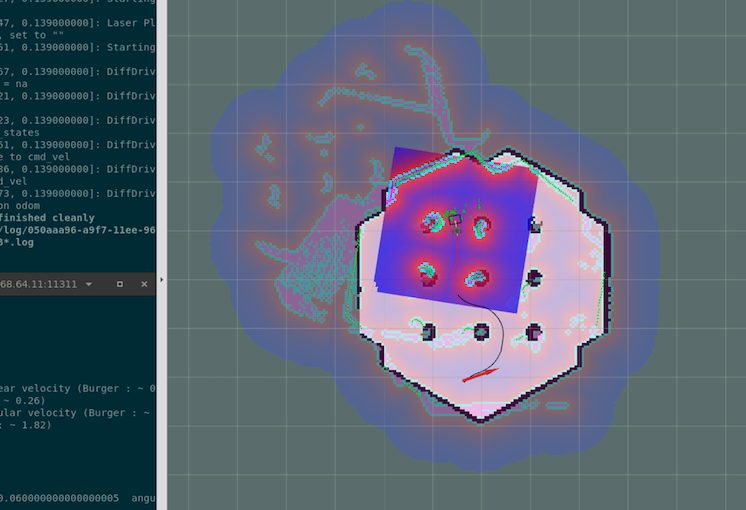
이렇게 LIDAR 센서를 통해 SLAM(Simultaneous Localization and Mapping) 매핑을 했는데 역시 신기하더라구여.
그리곤 실차 주행에 앞서 정확한 lane following을 위해 영상 켈리브레이션 세팅을 했어요.

차선 감지 area와 흰색 선과 노랑색 선을 구분하기 위해 hue, saturation, lightness 같은걸 조정했어요.

암튼 뭐 잘 간답니다.
autorace 경기를 기반해서 교육 진행하였는데요. 여기에는 몇 가지 미션이 있습니다. 신호등, 교차로, 공사장, 주차, 차단봉, 터널?
Lidar 정보를 SLAM으로 읽어 터널 탈출하는 미션

그런데 의외로 단순?했어요. 1번 미션 완료 트리거가 수행되면 로봇은 2번 미션 감지 모드로 전환하는 식이고, 고정된 값으로 이동하기도 하고,,? 일반 트렉은 자율적으로 주행하지만 일 부 구간은 미리 정의된 기능을 실행하기만 하더라구요.

결론
결론은 재밌었습니다. 좋은 경험한것 같고 관심있었던 분야라서 정말 즐겁게 교육 들을 수 있었습니다. 하지만 정말 얕게 맛만본 상태라 자율주행에 대해 감이 오질 않네요..