Ⅰ. usb_cam 노드
1. 실행 방법
2. 파라미터
| parameter | 타입 | 기본값 | 의미 |
|---|
video_device | string | "/dev/video0" | 디바이스 위치 |
image_width | integer | 640 | 이미지 너비 |
image_height | integer | 480 | 이미지 높이 |
pixel_format | string | "mjpeg" | mjepeg, yuvy, uyvy |
io_method | string | "mmap" | mmap, read, userptr |
camera_frame_id | string | "head_camera" | 카메라의 tf frame |
framerate | integer | 30 | fps |
contrast | integer | 32 | 이미지의 대비값 (0-255) |
brightness | integer | 32 | 이미지 밝기 (0-255) |
saturation | integer | 32 | 이미지 채도 (0-255) |
sharpness | integer | 22 | 이미지 선명도 (0-255) |
autofocus | boolean | false | 자동 초점 |
focus | integer | 51 | autofocus="false"인 경우 초점 거리 (0=at infinity) |
autoexposure | boolean | ? | 자동 노출 |
exposure | integer | ? | autoexposure="false"인 경우 노출 값 |
3. 예제 launch file
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="autoexposure" value="false" />
<param name="exposure" value="50" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
Ⅱ. usb_cam 토픽
1. 토픽과 메세지 유형
2. 이미지 토픽을 받아 동영상으로 저장
rosrun image_view video_recorder image:='usb_cam/image_raw' _filename='video.avi' _fps=30
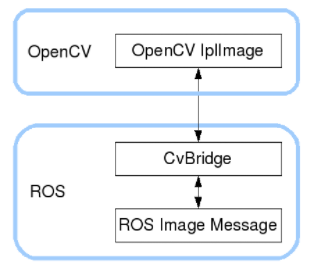
Ⅲ. CvBridge
- 이미지 데이터 형태를 ros와 openCV간 변환시켜줌
1. ROS -> OpenCV
from cv_bridge import CvBridge
bridge = CvBridge()
cv_image = bridge.imgmsg_to_cv2(image_message, desired_encoding='passthrough')
2. OpenCV -> ROS
from cv_bridge import CvBridge
bridge = CvBridge()
image_message = bridge.cv2_to_imgmsg(cv_image, encoding="passthrough")
3. encoding
-
passthrough : msg.encoding에서 설정된 값 그대로 사용
-
mono8 : CV_8UC1, grayscale image
-
mono16 : CV_16UC1, 16-bit grayscale image
-
bgr8 : CV_8UC3, color image with blue-green-red color order
-
rgb8 : CV_8UC3, color image with red-green-blue color order
-
bgra8 : CV_8UC4, BGR color image with an alpha channel
-
rgba8 : CV_8UC4, RGB color image with an alpha channel
Ⅳ. 예시
import cv2
import rospy
import numpy as np
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
bridge = CvBridge()
cv_image = np.empy(shape=[0])
def img_callback(data):
global cv_image
cv_image = bridge.imgmsg_to_cv2(data, "bgr8")
rospy.init_node('cam_tune' anonymous=True)
rospy.Subscriber("/usb_cam/image_raw/", Image, img_callback)
while not rospy.is_shutdown():
if cv_image.size != (640*480*3):
continue
cv2.imshow("display", cv_image)
cv2.waitKey(33)

