자율주행
1.자율주행 자동차 기술

인지 -> 판단 -> 제어반복적 수행다양한 센서를 이용해 주변 환경, 상태를 인지어느 곳에 어던 상태로 존재하는지까지 확인센서 융합 기술로 인지 성능을 높인다.Lidar, Radar, Camera가 대표적 센서Global Navigation Stellite System
2022년 4월 14일
2.경로 계획
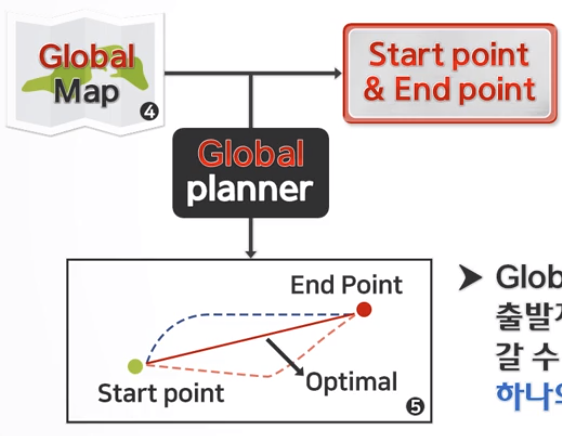
정의 : 한 지점에서 다른 한 지점까지 가는 동안 일어날 수 있는 모든 상황을 고려하여 주행을 진행하는 기술종류 : 전역 경로 계획, 지역 경로 계획Global Map 안에서 출발 지점에서 도착 지점까지 갈 수 있는 수많은 경로 중 하나의 경로를 선택하는 기술Local
2022년 4월 15일
3.Visual SLAM

동시적 위치추적 및 지도 작성 기술작성된 지도 + Localization = SLAM시각데이터를 이용해 동시적 위치 추적 및 지도 작성을 하는 알고리즘특징점 검출 : 이미지 한 장을 빠르고 효과적으로 처리하기 위해 이미지로부터 특징이 되는 지점 거출특징점 매칭 : 서로
2022년 4월 15일
4.Visual SLAM (2)
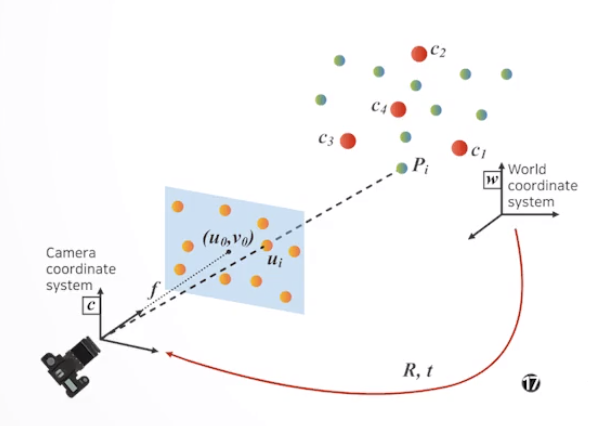
1. 초기 카메라 추정 초기 지도로 부터 전체 지도로 확장됨 초기 지도 크기 (단위)가 전체 지도의 크기를 결정 초기 지도 에러가 전체 지도에 전달 될 수 있음 초기지도 작성이 중요 매칭된 특징점에 대한 삼각 측량 Stereo Cam 두 카메라의 상대적
2022년 4월 15일