자율주행 관련 논문리뷰
1.[논문 Review] Camera and LiDAR Sensor Fusion for Improving Object Detection
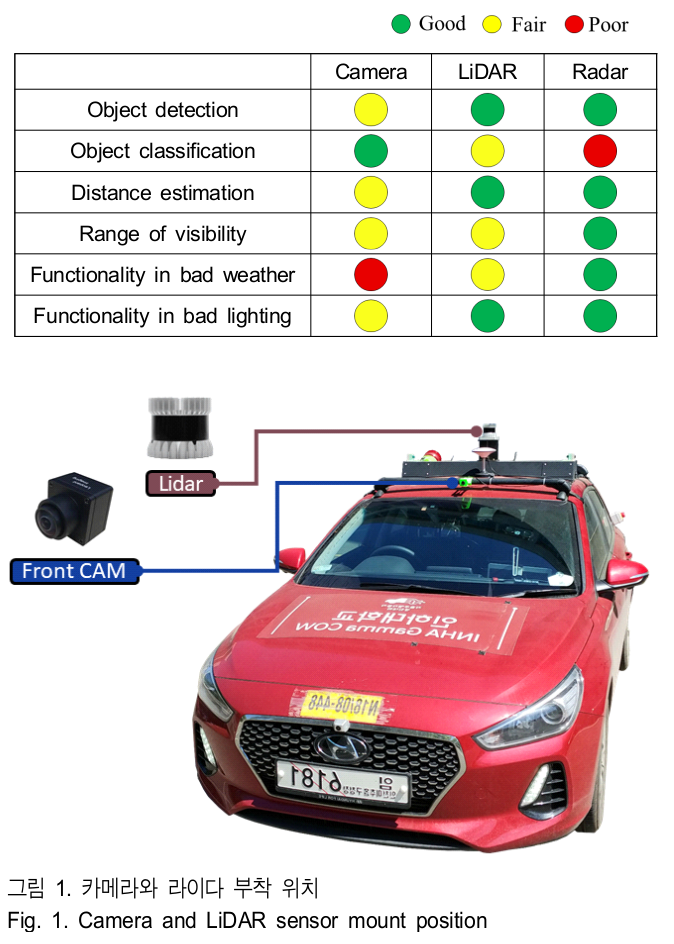
Lidar, Camera를 이용한 객체 검출 후 각 센서에서 검출된 객체를 late fusion 방식으로 융합하여 성능을 향상시킨다.해당 논문에서는 Camera(YoLov3), 거리 추정은 Perspective Matrix, Lidar 객체 검출은 K-means Clu
2022년 8월 11일