🧪 Lucid vs. PyTorch 비교: LeNet-5 훈련
이번 개발 일지에서는 Lucid의 완성도/사용성을 현실적인 기준으로 점검하기 위해, 고전적인 CNN인 LeNet-5로 MNIST를 학습시키고 PyTorch와 결과를 비교했다. 목표는 "최신 SOTA"가 아니라, 작지만 실제적인 모델/데이터 조합에서
- 학습이 제대로 수렴하는지,
- 손실 곡선이 상식적인 모양인지,
- 평가 정확도가 비슷한 수준으로 나오는지,
- 실험이 재현 가능한 형태로 기록되는지 확인하는 것이다.
🧭 실험 원칙
프레임워크 비교에서 가장 흔한 함정은 "다른 데이터, 다른 전처리, 다른 초기화"를 섞어놓고 차이를 해석하는 것이다. 그래서 이번 실험은 동일 입력을 가장 우선순위에 두었다. MNIST를 한 번 로드한 뒤, 두 프레임워크가 동일한 x_train/y_train, x_test/y_test 배열을 사용하도록 맞췄다.
그 다음으로는 동일 모델 구조를 강제했다. Conv/Pool/FC의 채널 수와 커널 크기, 활성화 함수, 풀링 종류까지 동일하게 고정했다. 마지막으로 동일 업데이트 규칙을 적용했다. 옵티마이저는 SGD+momentum, 손실은 cross entropy, 배치 크기와 epoch 수는 동일하다.
이 세 조건이 만족되면, 남는 차이는 프레임워크 구현 디테일(연산 순서, 수치 오차, 디바이스 런타임) 쪽으로 수렴한다. 이 방향이야말로 "Lucid가 실제 학습을 끝까지 수행할 수 있는가?"라는 질문에 가장 직접적으로 답해준다.
🧾 데이터와 전처리
입력 이미지 는 MNIST 관례에 따라 평균/표준편차로 정규화했다. 정규화는 다음과 같다:
이 전처리는 단순해 보이지만, 손실 곡선의 초반 형태("얼마나 빨리 떨어지는지")를 강하게 좌우한다. 따라서 두 프레임워크 모두 같은 를 사용하도록 했다.
아래는 torchvision으로 로드 → NumPy 배열로 변환 → 정규화"의 최소 코드이다(설명 목적의 축약 코드).
MNIST_MEAN = 0.1307
MNIST_STD = 0.3081
def normalize(x):
return (x - MNIST_MEAN) / MNIST_STD
train = datasets.MNIST(root=..., train=True, download=True)
test = datasets.MNIST(root=..., train=False, download=True)
x_train = train.data.unsqueeze(1).numpy().astype("float32") / 255.0
y_train = train.targets.numpy().astype("int64")
x_test = test.data.unsqueeze(1).numpy().astype("float32") / 255.0
y_test = test.targets.numpy().astype("int64")
x_train = normalize(x_train)
x_test = normalize(x_test)이렇게 만든 x_train/x_test는 shape이 이고 dtype은 float32다. 레이블은 int64다. 둘 다 모델 입력에 즉시 넣을 수 있는 형태로 맞춰 놓는 것이 포인트다.
⚔️ LeNet-5 모델 구현 비교
이번 실험의 LeNet-5는 고전 설정에 맞춰 Tanh 활성화와 Average Pooling을 사용했다.
Lucid에서 Conv/Pool/Linear의 구현은 아래 파일들에 있다:
- Conv:
lucid/nn/modules/conv.py - Pool:
lucid/nn/modules/pool.py - SGD:
lucid/optim/sgd.py - Cross entropy:
lucid/nn/functional/_loss.py
Lucid 구현
class LeNet5(lucid.nn.Module):
def __init__(self):
super().__init__()
self.conv1 = lucid.nn.Conv2d(1, 6, kernel_size=5, padding=0)
self.conv2 = lucid.nn.Conv2d(6, 16, kernel_size=5, padding=0)
self.pool = lucid.nn.AvgPool2d(kernel_size=2, stride=2)
self.fc1 = lucid.nn.Linear(16 * 4 * 4, 120)
self.fc2 = lucid.nn.Linear(120, 84)
self.fc3 = lucid.nn.Linear(84, 10)
self.act = lucid.nn.Tanh()
def forward(self, x):
x = self.pool(self.act(self.conv1(x)))
x = self.pool(self.act(self.conv2(x)))
x = x.reshape(x.shape[0], -1)
x = self.act(self.fc1(x))
x = self.act(self.fc2(x))
return self.fc3(x)PyTorch 구현
class LeNet5(torch.nn.Module):
def __init__(self):
super().__init__()
self.conv1 = torch.nn.Conv2d(1, 6, kernel_size=5)
self.conv2 = torch.nn.Conv2d(6, 16, kernel_size=5)
self.pool = torch.nn.AvgPool2d(kernel_size=2, stride=2)
self.fc1 = torch.nn.Linear(16 * 4 * 4, 120)
self.fc2 = torch.nn.Linear(120, 84)
self.fc3 = torch.nn.Linear(84, 10)
self.act = torch.nn.Tanh()
def forward(self, x):
x = self.pool(self.act(self.conv1(x)))
x = self.pool(self.act(self.conv2(x)))
x = torch.flatten(x, 1)
x = self.act(self.fc1(x))
x = self.act(self.fc2(x))
return self.fc3(x)두 구현의 모양은 거의 동일하다. 차이는 "Flatten 처리"에서 드러난다.
- PyTorch는
torch.flatten(x, 1)을 쓴다. - Lucid는
x.reshape(x.shape[0], -1)을 쓴다.
둘 다 결과는 로 동일하다. 이처럼 모델 코드는 의도적으로 거의 같게 유지해 비교 오차를 줄였다. 파라미터 수는 두 프레임워크 모두 44,426으로 일치한다.
📉 손실함수와 정확도
분류 손실은 cross entropy로 측정했다. 로짓 에 대해 softmax 확률 는
정답 클래스 에 대한 손실은
정확도는 가장 단순한 분류 지표로서
로 계산했다. 여기서 중요한 건 평가 루프에서 학습 모드 차이가 개입되지 않도록 model.eval()을 정확히 호출하는 것이다. LeNet-5 자체는 bn/dropout이 없지만, 실험 습관 차원에서 train/eval 전환은 동일하게 수행했다.
Lucid의 cross entropy 구현은 exp(logits - max)로 안정화한 softmax를 만들고, -log(prob[idx, target])로 손실을 계산한다(lucid/nn/functional/_loss.py). 즉 수식 그대로 "가능한 안정한 형태"로 구현되어 있다.
⚙️ 하이퍼파라미터 설정
이번 실험은 학습 안정성 확인이 목적이므로, 가장 단순한 설정으로 시작했다.
옵티마이저는 SGD+momentum이며, weight decay는 0으로 두었다. weight decay를 끄는 이유는 간단하다. 규제 항까지 섞기 시작하면, "학습이 잘 된다/안 된다"의 원인을 규제에서 찾게 되어 프레임워크의 기본 경로 검증 목적이 흐려진다.
또한 시드를 고정해 shuffle/초기화 변동이 결과를 과도하게 흔들지 않도록 했다. 완벽한 동일성은 어렵더라도, 실험을 반복했을 때 비슷한 결론이 나와야 이 실험이 의미를 가진다.
🧵 학습 루프
두 프레임워크의 학습 루프는 의도적으로 같은 형태로 유지했다.
PyTorch 학습 루프
model.train()
for x, y in train_loader:
x, y = x.to(device), y.to(device)
opt.zero_grad()
logits = model(x)
loss = torch.nn.functional.cross_entropy(logits, y)
loss.backward()
opt.step()Lucid 학습 루프
model.train()
for x, y in train_loader:
x, y = x.to("gpu"), y.to("gpu")
opt.zero_grad()
logits = model(x)
loss = lucid.nn.functional.cross_entropy(logits, y)
loss.eval()
loss.backward()
opt.step()겉모양은 거의 동일하다. 하지만 Lucid 쪽에는 loss.eval() 이 들어간다. 이 한 줄이 사용성 관점에서 가장 중요한 차이였다. Lucid는 MLX 경로에서 lazy 특성을 갖기 때문에, 손실을 실제로 평가(materialize)한 뒤 역전파를 수행해야 학습 루프의 시점이 안정적으로 고정된다.
여기서 중요한 건, 이 호출이 "하드웨어 최적화" 이야기가 아니라는 점이다. 사용자가 기대하는 것은 "loss를 계산했으면 그 loss로 backward가 되겠지"라는 당연한 순서다. loss.eval()은 바로 그 순서를 강제해, 훈련 중간에 그래프가 누적되거나 시점이 꼬이는 위험을 줄인다.
📈 결과 플롯
아래 플롯은 loss(위)와 accuracy(아래)를 겹쳐 그린 결과다.
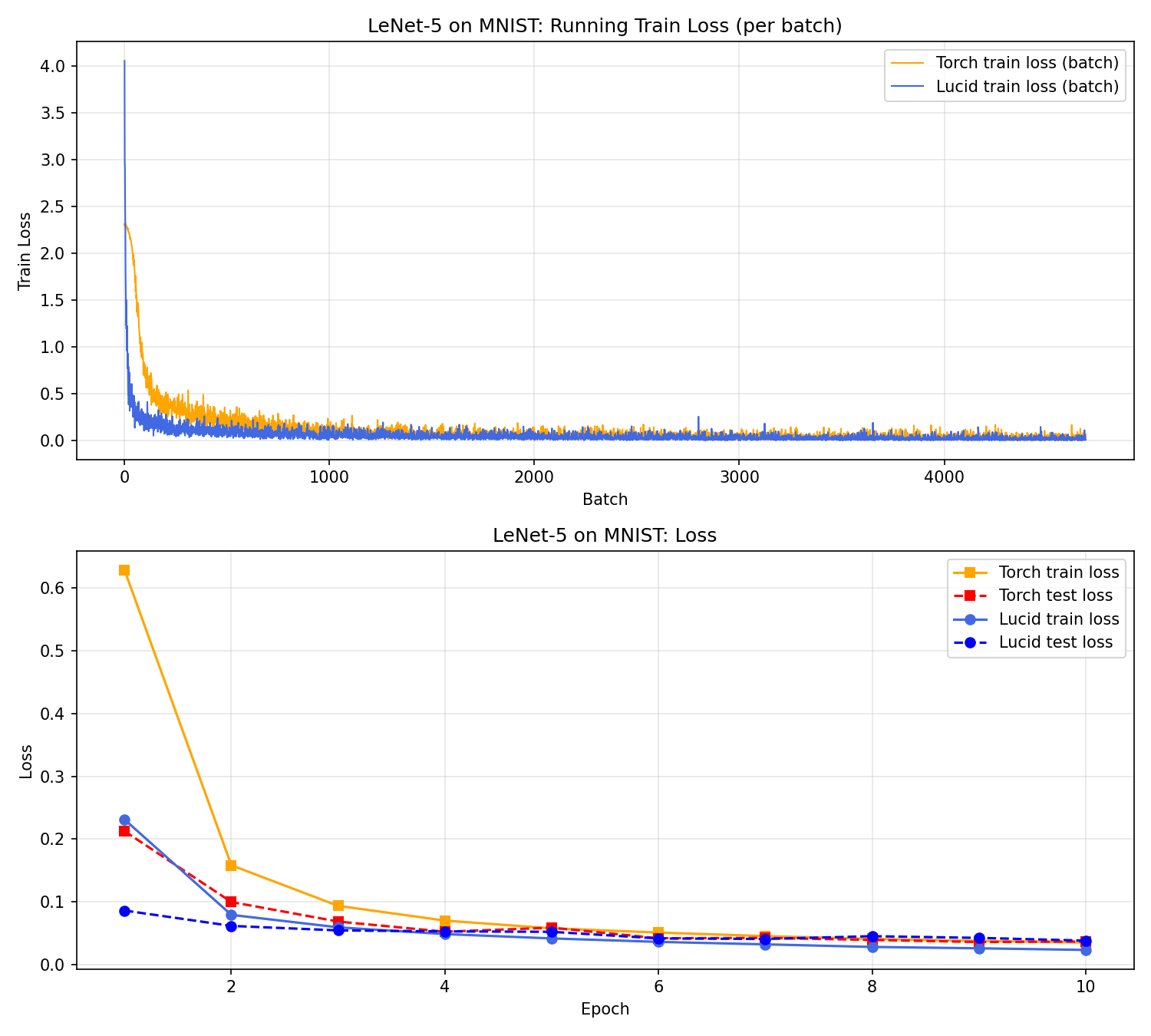
곡선이 보여주는 메시지는 간단하지만, 해석은 꽤 풍부하다. 먼저 두 프레임워크 모두 손실이 빠르게 감소하며, 테스트 정확도는 98%대에 안정적으로 도달한다. 이는 "학습이 정상적으로 수렴했다"는 가장 중요한 신호다.
초반(1–2 epoch) 에는 Lucid 쪽 손실이 더 빠르게 떨어지는 구간이 보인다. 이 차이는 초기화/셔플의 미세한 차이, 연산 순서에 따른 수치 오차 등으로 충분히 설명 가능하다. 실제로 후반부로 갈수록 두 곡선은 비슷한 기울기로 완만해지며, 7–10 epoch 구간에서는 거의 평행한 형태로 안정화된다.
또 다른 관찰 포인트는 일반화 갭이다. train acc가 test acc보다 항상 높으며, 이는 정상적인 과적합 경향을 의미한다. 하지만 gap이 과도하게 벌어지지 않아, 모델이 "학습 데이터만 기억"하는 수준으로 치우치지 않았다는 점도 확인할 수 있다. 이 실험에서는 Lucid가 더 낮은 train loss를 달성했지만, test acc/test loss는 PyTorch와 거의 비슷하다. 즉, 훈련 성능의 우세가 곧바로 일반화 우세로 이어지지 않는다는 전형적인 패턴을 보여준다.
곡선의 "부드러움"도 중요하다. 학습 도중 급격한 스파이크나 불안정한 요동이 없다는 것은 옵티마이저/손실/역전파가 안정적으로 작동한다는 신호다. 특히 Lucid의 경우 loss.eval()로 lazy 평가 타이밍을 고정했기 때문에, 손실 곡선이 매 epoch마다 안정적으로 연결된다. 이런 안정성은 단순한 숫자보다 실험 신뢰도를 높인다.
결론적으로, 플롯이 말하는 핵심은 "정상적인 수렴"과 "유사한 최종 성능"이다. 초반의 작은 차이는 실험 구성 특성으로 설명 가능하며, 두 프레임워크가 동일한 학습 궤적을 공유한다는 점이 더 중요하다.
🧾 최종 수치 요약
실험 로그에서 최종 epoch 기준 핵심 지표만 추리면 다음과 같다.
| 항목 | Lucid | PyTorch |
|---|---|---|
| Train loss | 0.0235 | 0.0353 |
| Train acc | 0.9936 | 0.9891 |
| Test loss | 0.0384 | 0.0370 |
| Test acc | 0.9866 | 0.9877 |
| Params | 44,426 | 44,426 |
| Total epoch time (s) | 30.10 | 14.85 |
성능(정확도) 관점에서 두 결과는 거의 같은 수준이며, test loss도 유사한 범위다. train loss가 더 낮다고 항상 일반화가 더 좋다는 의미는 아니므로, 여기서는 test acc/test loss가 비슷하다는 점을 더 중요한 결론으로 둔다.
epoch time 합계는 학습+평가를 모두 포함하며, 프레임워크 런타임 특성·캐시·백엔드에 따라 달라질 수 있다. 따라서 시간 값은 "빠르다/느리다"의 결론보다는, 프로파일링 대상이 생겼다는 신호로 받아들이는 편이 안전하다.
🔎 PyTorch와 Lucid의 비교
두 프레임워크는 의도적으로 "사용자 루프의 모양"을 거의 동일하게 맞출 수 있다. 그 덕분에 실험 코드도 크게 달라지지 않는다. 특히 zero_grad → forward → loss → backward → step의 리듬은 동일하다.
반면, 실제로 차이점이 드러나는 부분은 존재한다.
같은 점
- 모델 정의는
Module기반이며,forward가 핵심 진입점이다. - 손실/정확도 로깅은 epoch 단위로 손쉽게 가능하다.
- 옵티마이저의 업데이트 규칙은 동일한 형태로 적용된다(SGD+momentum).
다른 점
- Lucid(MLX 경로)는
loss.eval()로 lazy 평가 시점을 확정해야 한다. - Tensor reshape/flatten API가 약간 다르며, Lucid는
reshape를 자연스럽게 쓰게 된다. - 디바이스 문자열/이동 방식이 다르고, 실험 코드에서는 이를 최소한만 노출하는 것이 좋다.
이 차이는 "Lucid가 부족하다"기보다는, 백엔드 특성을 사용자 경험으로 어떻게 흡수할 것인가라는 설계 문제에 가깝다. 이번 실험은 그 설계가 "최소한의 추가(한 줄)"로 학습을 끝까지 수행할 수 있음을 보여줬다.
✅ 정리
이번 미니 실험은 “얼마나 빨리”나 “몇 % 더”보다는, 학습 루프가 끝까지 자연스럽게 이어지는가를 묻는 성격에 가깝다. 곡선의 형태가 과도하게 요동치지 않고, 손실과 정확도가 같은 방향으로 움직인다는 사실은 기술적으로는 평범하지만, 구현 관점에서는 많은 전제가 충족되어야 얻어지는 결과다. 이 점에서 Lucid의 코드 경로는 예측 가능한 흐름을 유지하고 있다고 해석할 여지가 충분하다.
다만 이런 해석은 과도하게 단정적으로 읽힐 필요는 없다. 이번 결과가 보여주는 것은 “최소 실험에서 어긋나지 않았다”는 수준이며, 그 이상은 더 다양한 실험에서 자연스럽게 드러나야 한다. 그럼에도 수식·모델·데이터·루프가 일관되게 맞물렸다는 사실은, 코드베이스가 점차 “실험을 반복 가능한 형태”로 수렴하고 있음을 시사한다. 이 비교실험이 비추는 Lucid의 완성도는 정답에 도달했다기보다, 실험 루프를 안정적으로 감당할 수 있는 단계에 가까우며, 앞으로의 확장 실험이 그 윤곽을 더 뚜렷하게 만들어 줄 것이다.
다음 단계는 자연스럽게 확장된다. 첫째, 옵티마이저를 Adam/AdamW로 바꿔 동일 프로토콜에서 수렴 궤적이 어떻게 변하는지 관찰할 필요가 있다. 둘째, LR scheduler를 붙여 학습률 곡선과 손실 곡선이 어떻게 상호작용하는지 살펴보면 "훈련 안정성"을 더 입체적으로 평가할 수 있다. 셋째, 조금 더 큰 데이터·모델로 이동하면, 지금은 보이지 않는 미세한 불안정성(예: 긴 학습에서의 누적 오차)이 드러날 가능성도 있다. 이런 확장은 성능을 과시하기보다는 루프의 내구성을 점검하는 성격으로 접근하는 것이 적절하다.
