안녕하세요
오늘 이야기 해볼 주제는 lidar data process 입니다.
velodyne lidar vlp 16 이라는 라이다 장비를 이용해서 pointcloud를 받아오게 됩니다.
이 row data(가공하지 않은 데이터)에는 수많은 점들이 찍혀있습니다. (대략 20000~30000개)
row data를 처리 하는 일련의 과정은 다음과 같습니다.
-
voxelization
-
roi 설정
-
ransac
-
dbscan
1~3까지는 rowdata의 점의 개수를 줄이는 과정이고, 4번은 군집화를 해주는 과정입니다.
즉 data process = downsamplig + clustering 이라고 볼 수 있습니다.
downsamplig과 clustering 방법에는 여러가지가 있습니다.
1~4번의 과정은 여러 방법 중 하나입니다.
오늘은 1~4번의 진행과정을 자세히 들여다 보겠습니다.
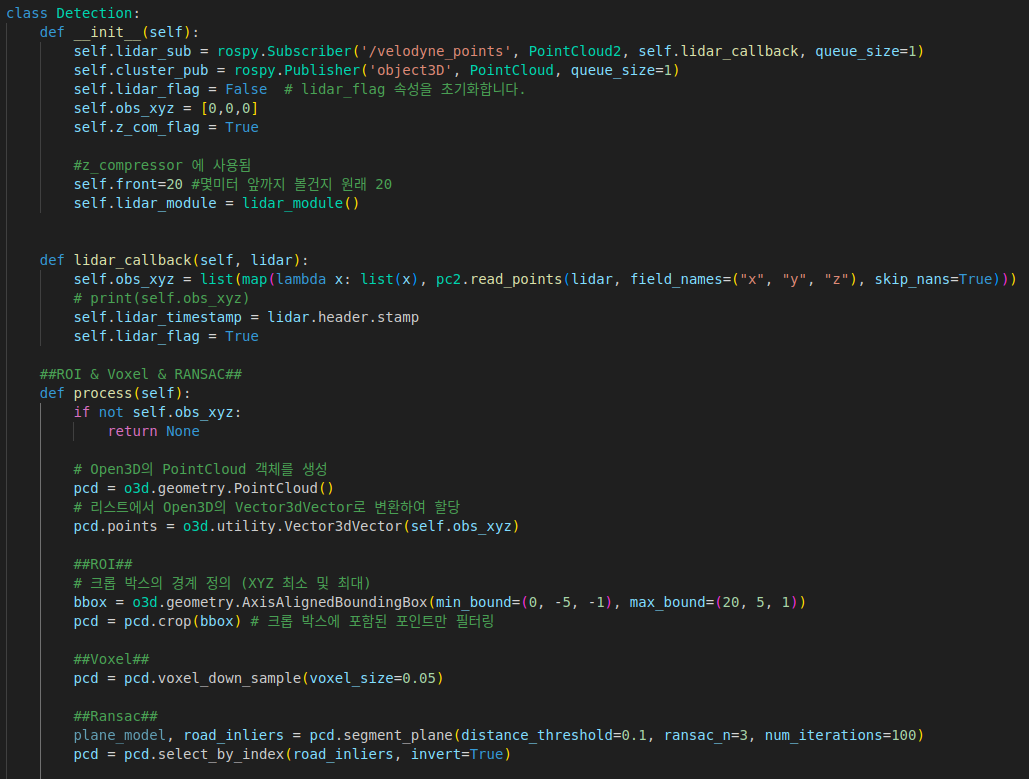
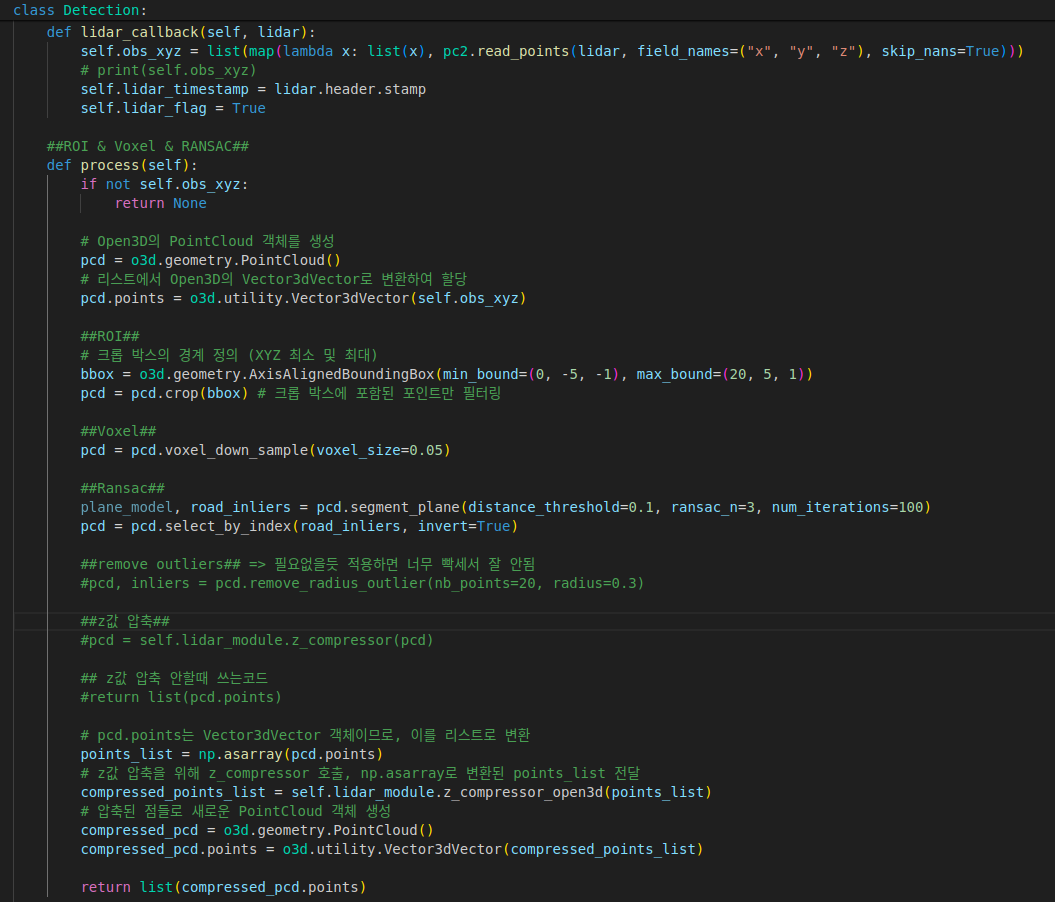
1~4번의 과정을 수행하기 위해 c++/python 등으로 구현이 가능하지만, 저는 python으로 구현해보았습니다.
python에서도 어떤 라이브러리(pcl, open3d, scikit-learn ..)를 활용하느냐에 따라 방법이 나뉘겠지만 저는 open3d와 사이킷런을 활용하였습니다.
- import open3d as o3d
open3d 라이브러리를 활용한 1-3번 과정
- from sklearn.cluster import DBSCAN
사이킷런에서 디비스캔을 활용한 4번 과정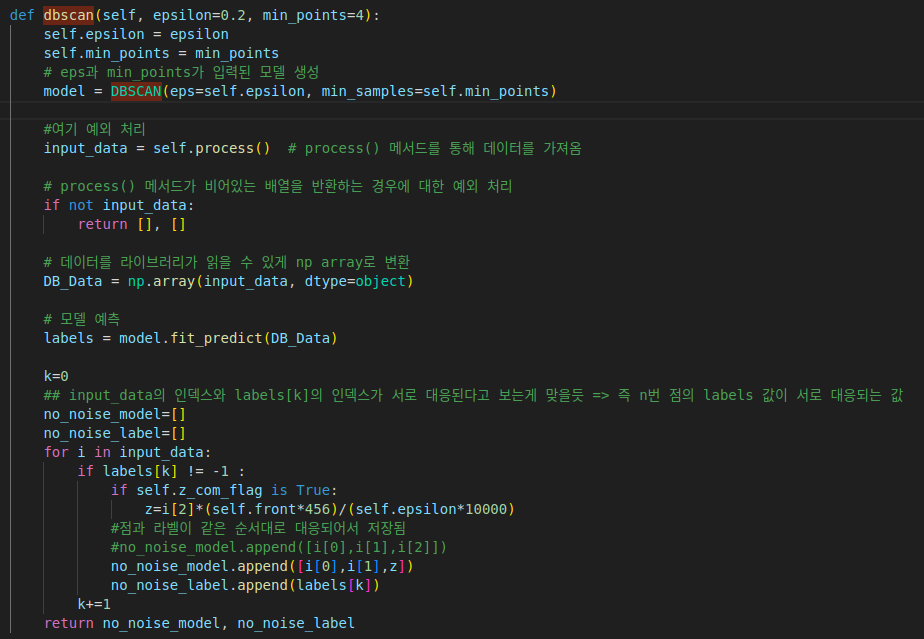
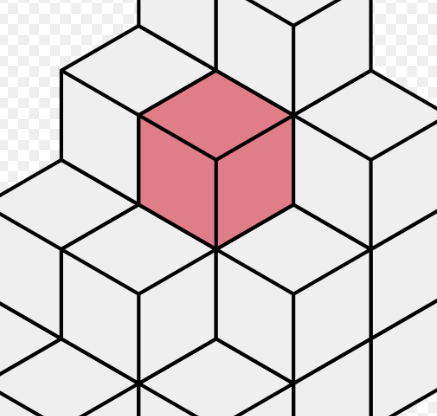
voxel의 개념
복셀은 복셀그리드 모양에서 점 1개만을 놔두고 나머지를 제거하는 방법이다.
앞선 예시로 복셀 사이즈를 0.05m로 설정하였음
아래 이미지에 색칠된 모양이 복셀그리드 입니다.

안녕하세요. 자율주행을 공부하고 있는 학생입니다.


블로그 보다가 궁금사항 생겨서 남깁니다
DBscan할때 input값이 2d 좌표값 인지 3d 좌표값인지 궁금합니다