TODO
- Robot 2호기 완성하기.
- Robot 3호기 완성하기.
오전
- Dice Spawner Scipt 수정
-> 주사위를 랜덤하게 배치 어떻게? (2.0Hr)
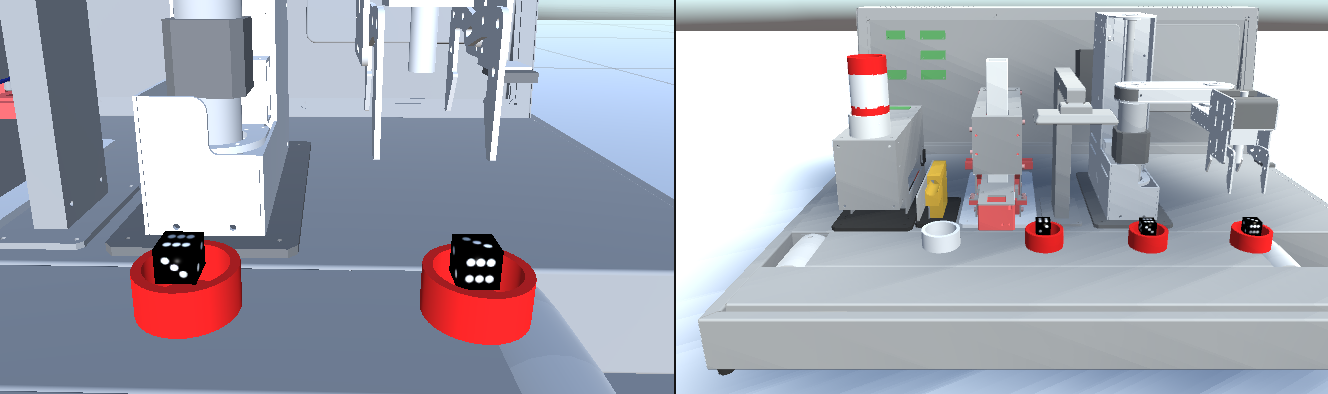
: Dropper에 이동 시킬 때 Rotation은 random 배치
x축, z축 값 0,90,180 중에서 랜덤하게 선택.


- Chip에 담겨서 이동하는 매커니즘 (3.0Hr)
- Dropper 에서 감지되는 콜라이더 객체(Chip)를 가져온다.
- Dice가 감지된 Chip Collider의 transform을 계속 따라가도록 한다. Transform.movetowards 이용
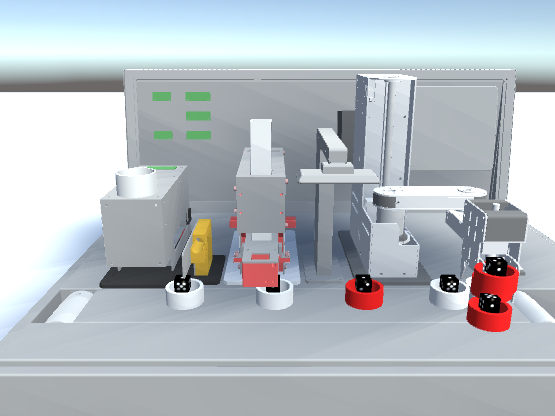
- Chip이 수거(?) 되면 주사위도 수거
를 고민하다가 간단하게 인스턴시에이션 할 때 주사위를 숨겨주고.
Robot2 콜라이더를 지나갈 때 SetActive(true)해주는 식으로 구현
오후
-
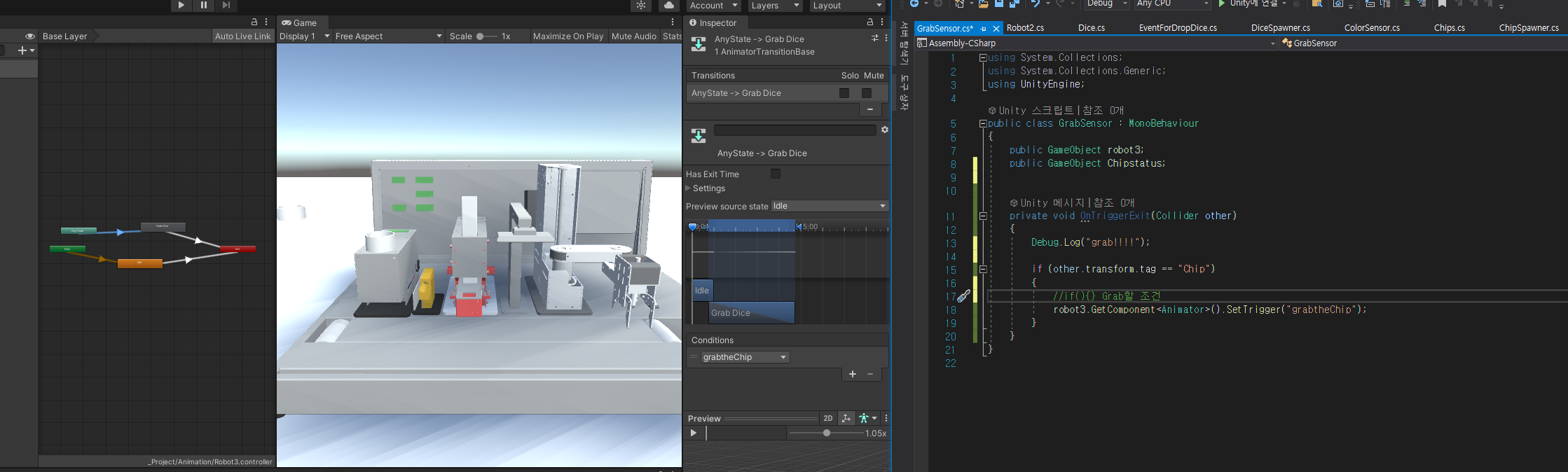
Robot 3 호기 Grab 장면 싱크로 (1.0Hr)
-
Grab 조건 충족시 Sensor의 콜라이더의 위치를 Transform.movetowards 이용하여 칩 이동(3.0Hr)
-> 매끄럽게 칩 이동 끝나고 Grab해제 시켜주는 방법 찾을 필요.
-> 스폰 시간 늘려서 조금 느리게 by 파트장님 피드백
-> 코루틴으로 해결하려고 했으나 실패 다른 방법 찾아보기.
리뷰
2호기는 완성, 3호기는 70% 완성
-> 코루틴으로 해결하려고 했으나 실패 다른 방법 찾아보기.
