Time Series Anomaly Detection with Multiresolution Ensemble Decoding
Time Series Anomaly Detection with Multiresolution Ensemble Decoding
- 2021 AAAI Conference on Artificial Intelligence (AAAI-21)
RNN based autoencoder with decoder ensembles
기존 RNN을 사용한 autoencoder는 sequential decoding으로 인해 overfitting 및 error accumulation이 발생하기 쉬움
➜ decoding length가 다른 여러 개의 decoder를 사용하는 방법을 적용
Introduction
previous recurrent auto-encoder based anomaly detection methods
➜ privious time steps로 인한 error accumulation 때문에 long time series를 reconstruction 하는데 어려움이 존재할 수 있음
- error accumulation : decoder의 input으로 이전 시점의 output이 사용되면서 이전 시점에 존재하던 error가 축적되는 문제
본 논문에서는 reccurent based multi-resolution decoders를 사용한 Multi-Resolution Ensemble Decoding(RAMED)을 제안
RAMED는 각각 다른 time step을 가지는 decoder를 사용하여 다양한 temporal information을 얻음
-
short decoding length : focus on macro temporal characteristics
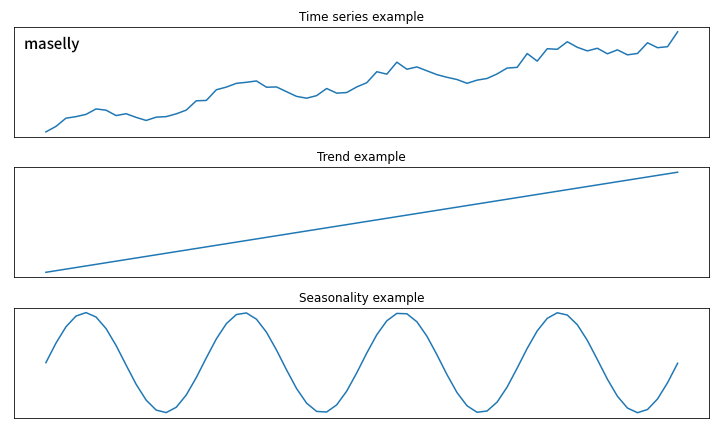
- trend patterns
- seasonality
-
long decoding length : focus on more detailed local temporal patterns
Trend and Seasonality example
S-RNN(S-RNN review)과 달리 lower-resolution temporal information을 higher resolution decoder에 전달
Contriution
-
서로 다른 decoding length를 가지는 multiple decoders ensemble
-
서로 다른 multiresolution temporal information을 융합하기 위한 mechanism
Architecture
Notation
Input time series : , where
Output reconstructed time series : , where
Error :
the number of encoders :
the number of decoders :
small noise : (, random noise ~)
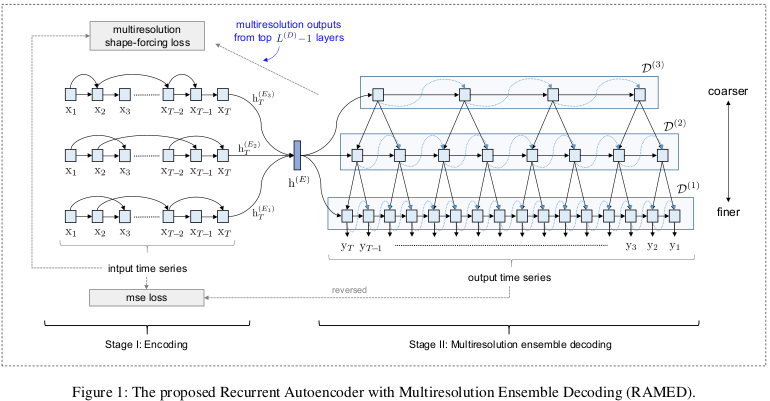
Multiresolution Ensemble Decoding
본 논문에서는 RNN을 사용한 S-RNN과 달리 LSTM을 사용
Encoding process는 S-RNN과 동일
sparsely connected RNN을 사용하는 encoder ensemble 사용
본 논문에서는 총 3개의 encoder 사용
: fully-connected layer
Decoding process
coarser decoder의 hidden state와 finer decoder의 hidden state를 concat하여 output 도출
각 decoder가 서로 다른 temporal information을 잡아낼 수 있도록 서로 다른 수의 step을 사용
robustness를 위해 small noise를 input에 추가
| decoding length | temporal characteristic |
|---|---|
| short | macro |
| long | micro |
서로 다른 길이의 decoded output을 dynamic time warping(DTW)를 통해 input time series와 비슷하게 만듦
Decoder Lengths
th decoder reconstructs a time series of length , where
단,
-
- in model figure
-
and
-
➜ 가장 top decoder가 적어도 2 steps는 가지도록 설정
Coarse-to-Fine Fusion
outputs의 length가 각각 다르기 때문에 average or median으로 ensemble output을 정리할 수 없음
이를 위해 coarse-to-fusion strategy 사용
아래는 example
두 decoder 과
*
의 information이 보다 coarse
➜ top decoder의 infromation은 모든 decoder의 것보다 coarse함
가장 macro information을 담당하는 인 decoder의 hidden state 와 같음
decoding 시에 보다 coarse한 information을 함께 사용하는 나머지 decoders의 hidden state 아래 식과 같이 계산됨
나머지 decoders의 hidden state는 previous hidden state의 설명은 아래와 같음
의 hidden state 는 sibiling decoder 의 slightly-coarser information 와 관련 있음
-
- : two-layer fully-connected network with PReLU(Parametric Rectified Linear Unit)
- : similar role as the residual connection
-
는 LSTM cell의 input으로 사용됨
the ensemble's reconstruced output
Loss Function
본 논문에서는 두 가지 loss를 함께 사용
-
reconstruction loss
output이 input을 얼마나 잘 reconstruction 했는지 확인
-
multiresolution shape-forcing loss
input 와 output 의 모양이 유사한 형태를 가지도록 하는 loss
time series 간의 similarity를 측정하는 DTW 사용
but min 값을 찾는 DTW는 미분이 불가능하기 때문에 smoothed DTW(sDTW)사용- Soft-DTW : a Differential Loss Function for Time-Series(ICML 2017, Soft-DTW)
- smoothed min operator : 이 있을 때 DTW는 min만 선택하지만 sDTW는 모든 경로를 고려하는 느낌...
matrix
➜ warping 경로 탐색을 위한 matrix (최단 경로 기반으로 warping)matrix : Euclidean distance matrix
matrix : the set of binary alignment matrix
: matrix inner product
-
Total loss
: batch size ()
: trade-off parameter
Anomaly Score
reconstruction error at time
validation step의 를 normal distribution 에 적합시킴
test set의 가 anomalous할 확률은
의 anomaly score
➜ 가 클수록 anomalous할 확률값이 작아져서 normal data의 error distribution을 벗어 남
Conclusion
- proposed recurrent ensemble network
- multiresolution decoder를 사용해서 다양한 time step의 information을 사용
- coarse-to-fine fusion mechanism을 통해 서로 다른 길이의 output을 통합
- local information에 overfitting 되는 것을 방지하며, decoding 중 발생할 수 있는 error accumulation을 완화
- probability based anomaly score
Dataset
본 논문에서 사용한 dataset list
는 window size
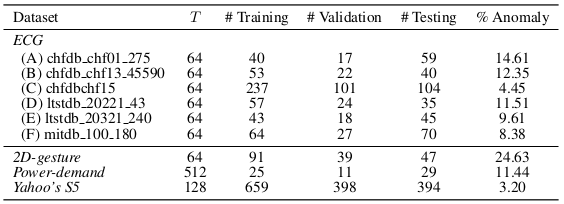
각 dataset의 dimension
| Dataset | Dimension |
|---|---|
| ECG | bivariate |
| 2D-gesture | bivariate |
| Power-demand | univariate |
| Yahoo's S5 Webscope | univariate |
* 3개 이상의 multivariate time series를 사용한 추가 실험이 존재했으면 좀 더 다른 비교군들과 비교하기 좋았을 것 같음
