Afffine Transformation
Affine Transformation은 변환들 중에서 우리에게 가장 친숙한 변환이다.
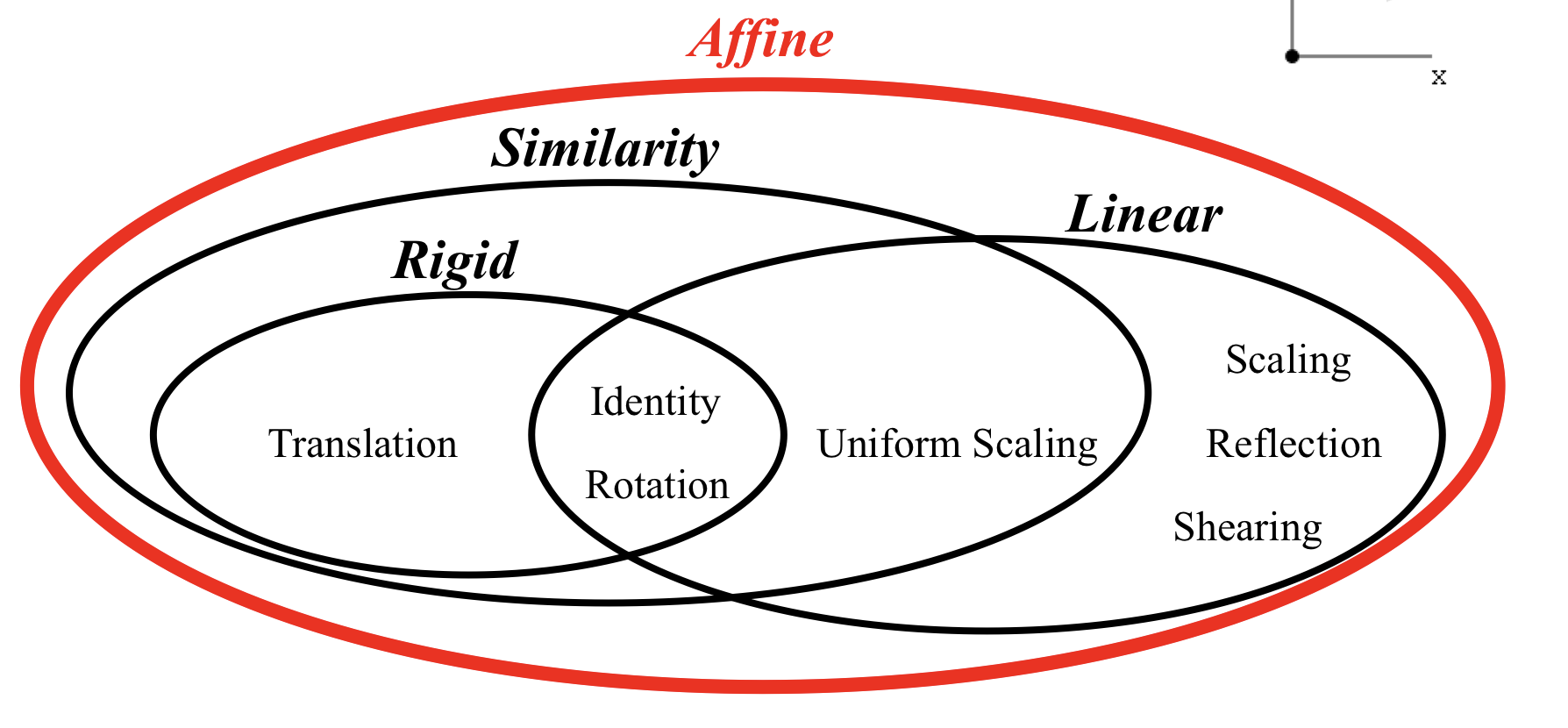
각 변환들은 다음과 같은 성질을 가지고 있다.
- Rigid : 변환하였을 때 점들 사이의 길이, 각도가 유지된다.
- Similarity : 점들 사이의 각도가 유지된다.
- Linear : 원점은 변환이 일어난 후에도 원점이다.
- Affine Transformation : 평행선들이 유지되고 점 간격의 비율이 유지된다.
cf. Reflection은 similarity로 분류하는 사람도 있다.
Linear Transformation이란
행렬의 곱으로 변환을 나타낼 수 있다면 linear transformation이라 부른다.
즉 변환시키고 싶은 점을 v라고 한다면
꼴로 나타낼 수 있는 모든 이다.
Linear Transformation 종류
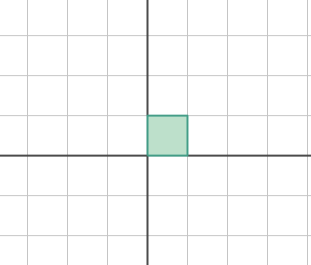
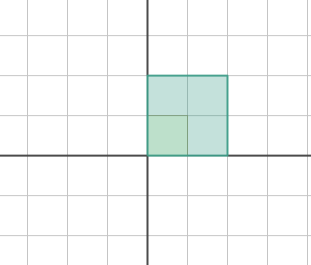
처음에 이런 모양으로 시작한다 했을때
uniform scaling
(기저 벡터의) 모든 방향으로 일정하게 확대/축소
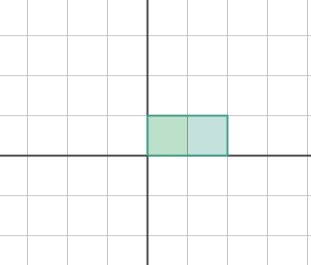
non-uniform scaling
특정 방향으로만 확대/축소
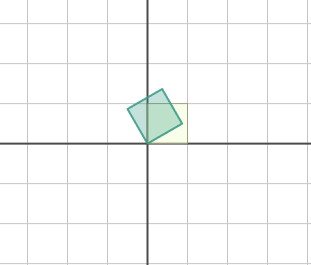
rotation
원점 중심 회전 (반시계 방향이 +방향)
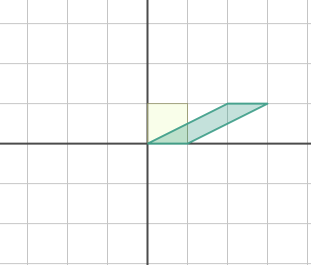
shearing
기울이기
reflection
축 대칭
Translation
Affine Transformation에서 혼자서 linear하게 계산할 수 없는 친구이다.
그래서 변환을
와 같이 나타내야 하는데
이 때문에 Affine Transformation(Linear + Translation)을
와 같이 나타내야 한다.
수식의 아름다움, 일정함을 좋아하는 사람들이 심기가 불편했고
기발한 발상을 하게 된다.
!! 2차원 점을 translation 계산을 위한 요소를 하나 추가해 3차원 점으로 표시하면 translation도 linear하게 표현할 수 있다 !!
예를 들자면 라고 할 때
와 같이 뒤에 1을 추가해 3차원 점으로 표기하는 것이다. (무조건 1을 추가한다.)
이렇게 된다면 원래 위의 변형도 그대로 사용할 수 있고
non-uniform scaling을 살펴보면
3*3 행렬로 변환
추가된 칸은 0으로 채운다. (마지막만 1로 표기)
위와 같이 원래 을 곱하였을 때와 결과가 다르지 않아
추가된 1은 non-uniform scaling에 영향을 주지 않는다.
하지만 이 추가된 행과 열을 통해 Translation이 가능하다.
(x방향으로 3만큼 이동)
이와 같이 translation을 linear한 format으로 표현 가능하다.
를 로 변환한
이러한 좌표를 Homogeneous Coordinate이라고 부른다.
Composition of Transformation
한 점에 대하여 여러 변환들이 적용이 될 때, 다음과 같이 표시할 수 있다.
,
!! 이때 적용하는 순서에 따라 결과가 달라질 수 있음을 유의하자.
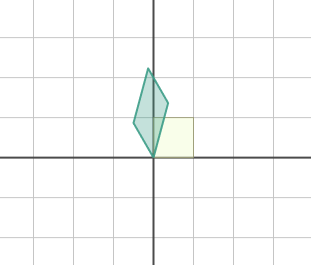
rotation 후 shearing
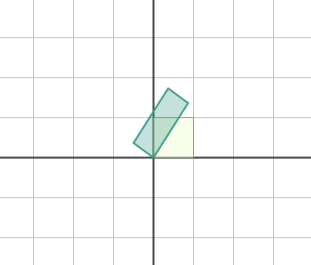
shearing 후 rotation