파이토치
-view 함수가 있어서 expanddims 같은 함수가 따로 필요 없다.
-함수 끝에 를 붙이면 inplace 명령이 된다. (안되는 함수도 존재)
-y.backward() 함수 실행하면 x의 미분값이 자동으로 갱신 # y.grad로 확인
-torch.autograd.grad() 함수를 사용해 tf.GradientTape 처럼 사용할 수 있다.
import torch
import torch.nn.functional as F
import torch.optim as optim
from torch import nn
from torchvision import datasets, transforms
torch.manual_seed(777)
batch_size = 32train_loader = torch.utils.data.DataLoader(
datasets.MNIST('dataset/', download=True, train=True,
transform=transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize(mean=(0.5,), std=(0.5,))
]
)),
batch_size=batch_size,
shuffle=True
)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('dataset/', download=True, train=False,
transform=transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize(mean=(0.5,), std=(0.5,))
]
)),
batch_size=batch_size,
shuffle=False
)
images, labels = next(iter(train_loader))
images.shape, images.dtype
# (torch.Size([32, 1, 28, 28]), torch.float32)
torch_image = torch.squeeze(images[0])
torch_image.shape
# torch.Size([28, 28])
image = torch_image.numpy()
label = labels[0].numpy()
plt.title(label)
plt.imshow(image)
plt.show()
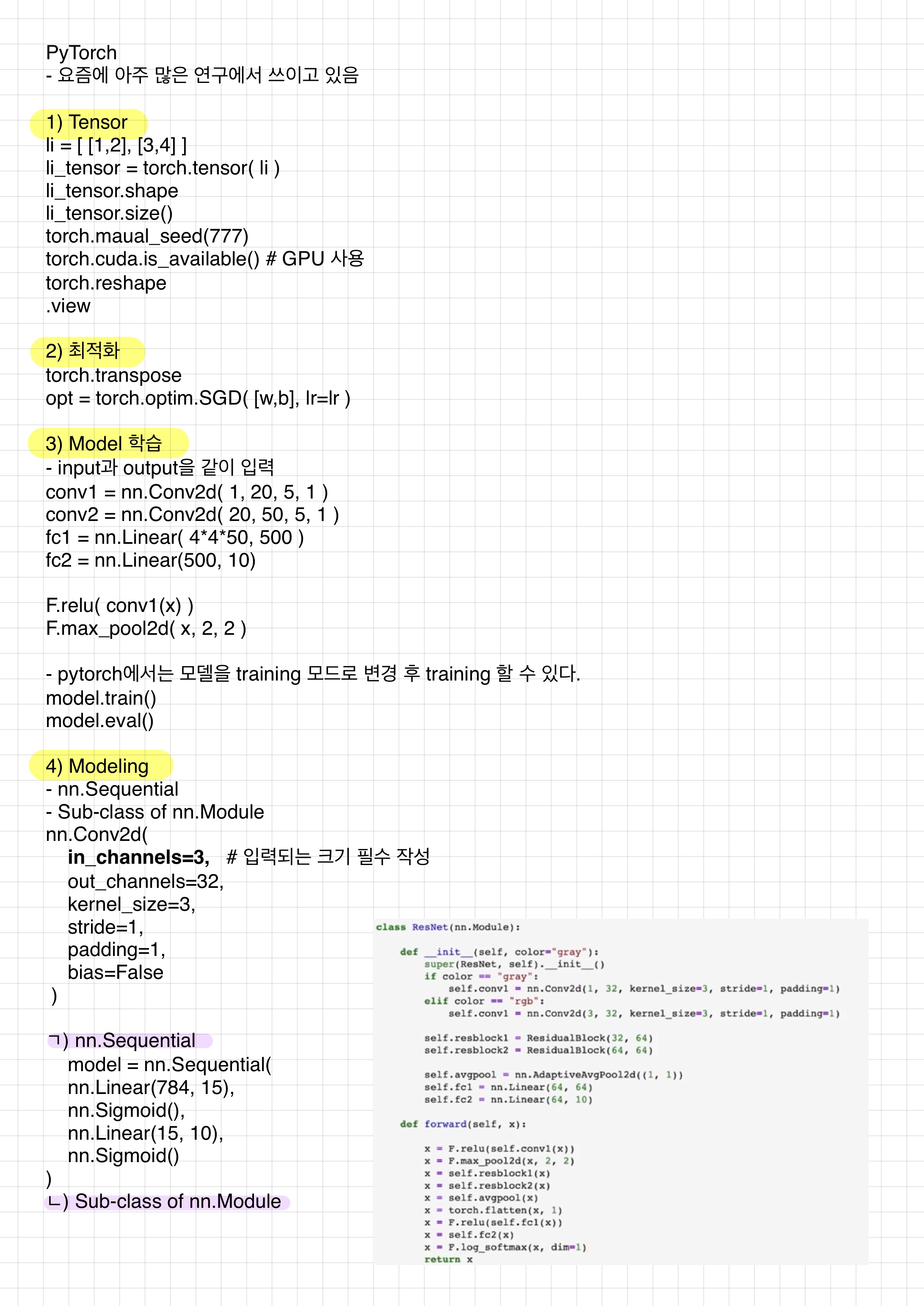
모델 정의
epoch
- batch
- model 연산
- loss 구하고
- grad (loss값 이용해서) grad 구하고
- model update 모델 업뎃
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 20, 5, 1)
self.conv2 = nn.Conv2d(20, 50, 5, 1)
self.fc1 = nn.Linear(4*4*50, 500)
self.fc2 = nn.Linear(500, 10)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.max_pool2d(x, 2, 2)
x = F.relu(self.conv2(x))
x = F.max_pool2d(x, 2, 2)
x = x.view(-1, 4*4*50)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return F.log_softmax(x, dim=1)device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = Net().to(device)
x, y = next(iter(train_loader))
x.shape, y.shape
# (torch.Size([32, 1, 28, 28]), torch.Size([32]))opt = optim.SGD(model.parameters(), 0.03)
for epoch in range(1):
# train
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
opt.zero_grad()
output = model(data)
# 예측 # 정답
loss = F.nll_loss(output, target)
# log_softmax랑 nll_loss 짝꿍. crossentropy 쓴거랑 같은 효과
loss.backward() # 미분
opt.step()
print('batch {} loss : {}'.format(batch_idx, loss.item()))
# eval
model.eval()
test_loss = 0
with torch.no_grad():
for data, target in test_loader:
output = model(data)
test_loss += F.nll_loss(output, target).item()
test_loss /= (len(test_loader.dataset) // batch_size)
print('Epoch {} test loss : {}'.format(epoch, test_loss))모델링
-nn.Sequentital
-Sub-class of nn.Module
nn.Sequentital
import torchsummarynn.Conv2d(
in_channels=3,
out_channels=32,
kernel_size=3,
stride=1,
padding=1,
bias=False
)
nn.Linear(
in_features=784,
out_features=500,
bias=False
)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = nn.Sequential(
nn.Linear(784, 15),
nn.Sigmoid(),
nn.Linear(15, 10),
nn.Sigmoid()
)
torchsummary.summary(model, (784,))Sub-class of nn.Module
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 20, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(20, 50, kernel_size=3, padding=1)
self.fc1 = nn.Linear(4900, 500)
self.fc2 = nn.Linear(500, 10)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.max_pool2d(x, 2, 2)
x = F.relu(self.conv2(x))
x = F.max_pool2d(x, 2, 2)
x = x.view(-1, 4900)
x = F.relu(self.fc1(x))
x = F.log_softmax(self.fc2(x), dim=1)
return x
model = Net()
torchsummary.summary(model, (1,28,28))ResNet
class ResidualBlock(nn.Module):
def __init__(self, in_channel, out_channel):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channel, out_channel, kernel_size=1, padding=0)
self.conv2 = nn.Conv2d(out_channel, out_channel, kernel_size=3, padding=1)
self.conv3 = nn.Conv2d(out_channel, out_channel, kernel_size=1, padding=0)
if in_channel != out_channel:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=1, padding=0)
)
else:
self.shortcut = nn.Sequential()
def forward(self, x):
out = F.relu(self.conv1(x))
out = F.relu(self.conv2(out))
out = F.relu(self.conv3(out))
out += self.shortcut(x)
return out
class ResNet(nn.Module):
def __init__(self, color='gray'):
super(ResNet, self).__init__()
if color == 'gray':
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, stride=1, padding=1)
elif color == 'rgb':
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1)
self.resblock1 = ResidualBlock(32, 64)
self.resblock2 = ResidualBlock(64, 64)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc1 = nn.Linear(64, 64)
self.fc2 = nn.Linear(64, 10)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.max_pool2d(x, 2, 2)
x = self.resblock1(x)
x = self.resblock2(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = F.relu(self.fc1(x))
x = self.fc2(x)
x = F.log_softmax(x, dim=1)
return xmodel = ResNet()
torchsummary.summary(model, (1, 28, 28))모델 학습
from torch.optim.lr_scheduler import ReduceLROnPlateauoptimizer = optim.Adam(model.parameters(), lr=0.03)
scheduler = ReduceLROnPlateau(optimizer, mode='min', verbose=True)def train_loop(dataloader, model, loss_fn, optimizer, scheduler, epoch):
model.train()
size = len(dataloader)
for batch, (x, y) in enumerate(dataloader):
x, y = x.to(device), y.to(device)
pred = model(x)
loss = loss_fn(pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if batch % 100 == 0:
loss = loss.item()
print(f'Epoch {epoch} : [{batch}/{size}] loss : {loss.item()}')
scheduler.step(loss)
return loss.item()for epoch in range(10):
loss = train_loop(train_loader, model, F.nll_loss, optimizer, scheduler, epoch)
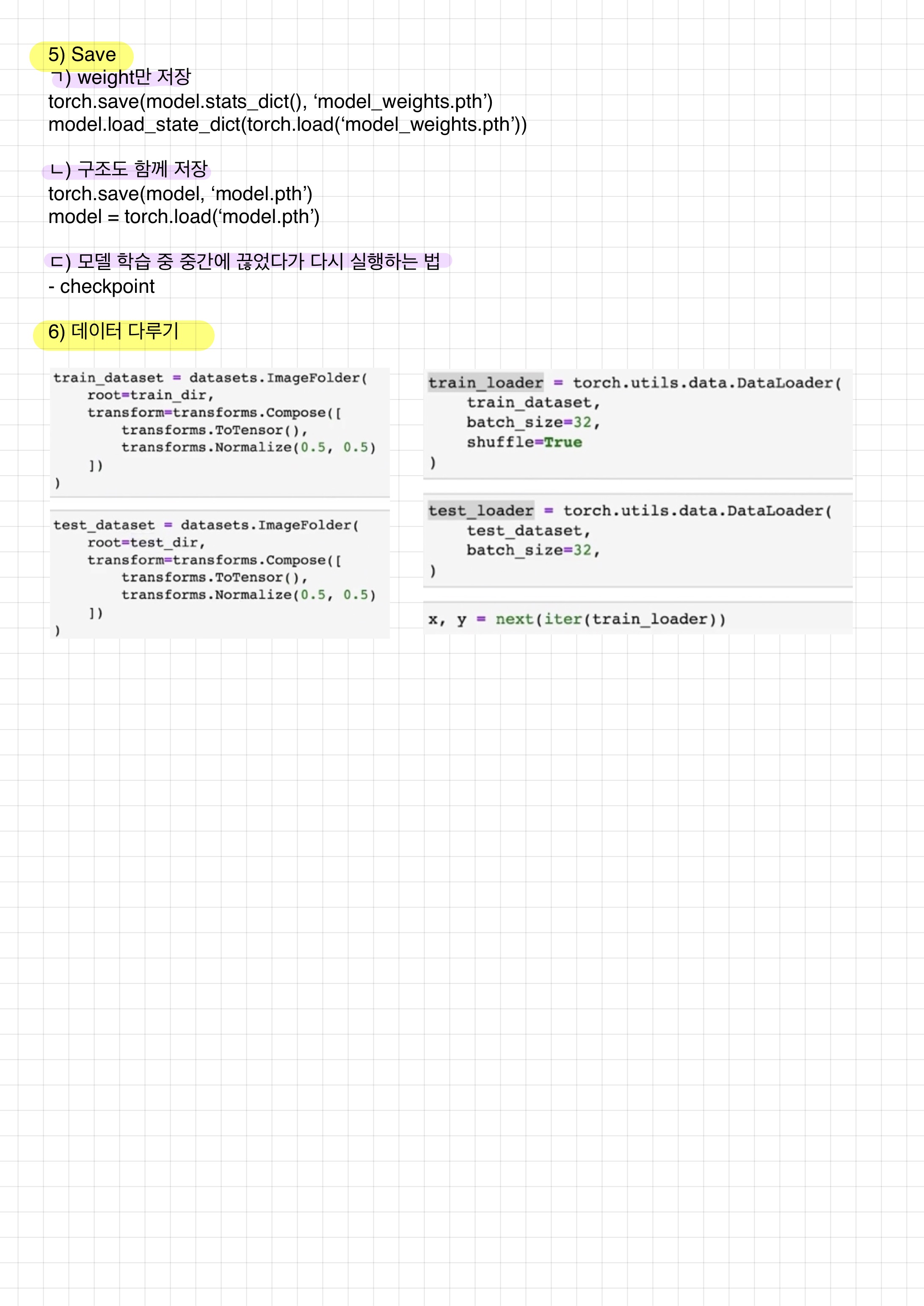
print(f'Epoch : {epoch} loss : {loss}')모델 저장
# 1. weight만 저장
torch.save(model.state_dict(), 'model_weights.pth')
model.load_state_dict(torch.load('model_weights.pth'))
# 2. 구조도 함께 저장
torch.save(model, 'model.pth')
model = torch.load('model.pth')데이터
from torchvision import datasets, transforms
import ostrain_dir = '../../deep_learning_team3/data/Car_Brand_Logos/Train/'
test_dir = '../../deep_learning_team3/data/Car_Brand_Logos/Test/'
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
os.listdir(train_dir + 'hyundai')train_dataset = datasets.ImageFolder(
root=train_dir,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.5, 0.5)
])
)
test_dataset = datasets.ImageFolder(
root=test_dir,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.5, 0.5)
])
)
train_loader = torch.utils.data.DataLoader(
train_dataset,
batch_size=32,
shuffle=True
)
test_loader = torch.utils.data.DataLoader(
test_dataset,
batch_size=32
)
x.shape, y.shape데이터셋 구현
train_paths = glob(train_dir + '/*.png')
test_paths = glob(test_dir + '/*.png')class Dataset(torch.utils.data.Dataset):
def __init__(self, data_paths, transform=None):
super(Dataset).__init__()
self.data_paths = data_paths
self.transform = transform
def __len__(self,):
return len(self.data_paths)
def __getitem__(self, idx):
path = self.data_paths(idx)
image = Image.open(path)
label_name = path.split('.png')[0].split('_')[-1].strip()
label = label_list.index(label_name)
if self.transform:
image = self.transform(image)
return image, label
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
batch_size = 32train_loader = torch.utils.data.DataLoader(
Dataset(train_paths, transform=transforms.ToTensor()),
batch_size=32,
shuffle=True
)
test_loader = torch.utils.data.DataLoader(
Dataset(test_paths, transform=transforms.ToTensor()),
batch_size=32
)
x, y = next(iter(train_loader))
x.shape, y.shape
21세기 주인공